因项目需求,需提取平面上的物体,不提取平面下的物体,尝试采用超体聚类+LCCP分割的方式,但由于上层点云模型一侧有空洞,导致分割效果不理想。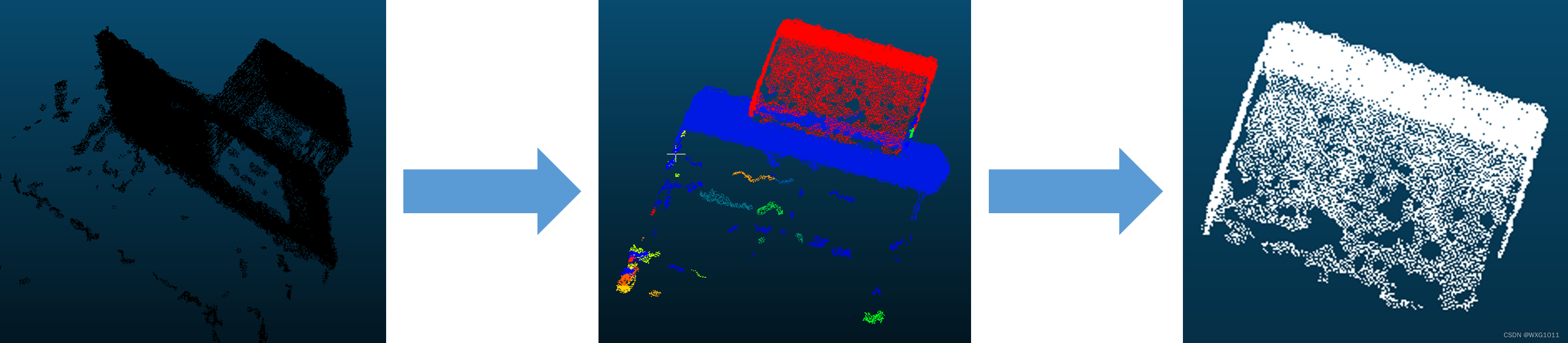
这里采用pcl::ExtractPolygonalPrismData类,实现平面上物体的提取。
pcl::ExtractPolygonalPrismData类是通过设定处于同一平面模型上的点索引向量,并指定一定高度,利用指定的点形成二维凸包,再结合指定高度生成多边形棱柱模型,分割出该棱柱的内部点集。
1、生成凸包
pcl::ConvexHull<pcl::PointXYZ> hull;
hull.setInputCloud(plane);
//重构的维度,若设置为2,则表示计算平面上的凸包
hull.setDimension(2);
//执行凸包重构,将结果存储在convexHull指向的点云中
hull.reconstruct(*convexHull);2、构建棱柱模型及分割
// 该类用于分割出棱柱模型内部的点集
pcl::ExtractPolygonalPrismData<pcl::PointXYZ> prism;
prism.setInputCloud(cloud);
// 设置平面模型的点集
prism.setInputPlanarHull(convexHull);
// 设置高度范围
prism.setHeightLimits(35.0f, 500.0f);
pcl::PointIndices::Ptr objectIndices(new pcl::PointIndices);
prism.segment(*objectIndices);
// 分割目标物
extract.setIndices(objectIndices);
extract.filter(*objects);完整示例代码:
#include <pcl/io/pcd_io.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/surface/convex_hull.h>
#include <pcl/segmentation/extract_polygonal_prism_data.h>
#include <pcl/visualization/cloud_viewer.h>#include <iostream>int
main(int argc, char** argv)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr plane(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr convexHull(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr objects(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>("..\\testdata\\result\\cylinder.pcd", *cloud) != 0){return -1;}pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);// 采样一致性算法实现的分割类pcl::SACSegmentation<pcl::PointXYZ> segmentation;segmentation.setInputCloud(cloud);// 设置构造的几何模型类型segmentation.setModelType(pcl::SACMODEL_PLANE);// 设置采样一致性方法类型segmentation.setMethodType(pcl::SAC_RANSAC);// 设置点到模型的距离阈值segmentation.setDistanceThreshold(10);// 设置模型参数优化segmentation.setOptimizeCoefficients(true);pcl::PointIndices::Ptr planeIndices(new pcl::PointIndices);segmentation.segment(*planeIndices, *coefficients);if (planeIndices->indices.size() == 0)std::cout << "Could not find a plane in the scene." << std::endl;else{// Copy the points of the plane to a new cloud.pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud);extract.setIndices(planeIndices);extract.filter(*plane);// 保存平面点云pcl::io::savePCDFile("..\\testdata\\result\\data\\plane.pcd", *plane);// 生成凸包pcl::ConvexHull<pcl::PointXYZ> hull;hull.setInputCloud(plane);//重构的维度,若设置为2,则表示计算平面上的凸包hull.setDimension(2);hull.reconstruct(*convexHull);//pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color_handler(cloud, 255, 188, 255);//pcl::visualization::PCLVisualizer viewer("Cloud Viewer");viewer.addPointCloud<pcl::PointXYZ>(cloud, "原始点云");//viewer.addPointCloud<pcl::PointXYZ>(convexHull, color_handler, "凸包点云");//viewer.spin();// 冗余检查.检查凸包的维度是否为2if (hull.getDimension() == 2){// 该类用于分割出棱柱模型内部的点集pcl::ExtractPolygonalPrismData<pcl::PointXYZ> prism;prism.setInputCloud(cloud);// 设置平面模型的点集prism.setInputPlanarHull(convexHull);// 设置高度范围prism.setHeightLimits(35.0f, 500.0f);pcl::PointIndices::Ptr objectIndices(new pcl::PointIndices);prism.segment(*objectIndices);// Get and show all points retrieved by the hull.extract.setIndices(objectIndices);extract.filter(*objects);//可视化pcl::visualization::CloudViewer viewerObjects("Objects on table");viewerObjects.showCloud(objects);pcl::io::savePCDFile("..\\testdata\\result\\data\\objects.pcd", *objects);while (!viewerObjects.wasStopped()){// Do nothing but wait.}}else std::cout << "The chosen hull is not planar." << std::endl;}return 0;
}运行效果:
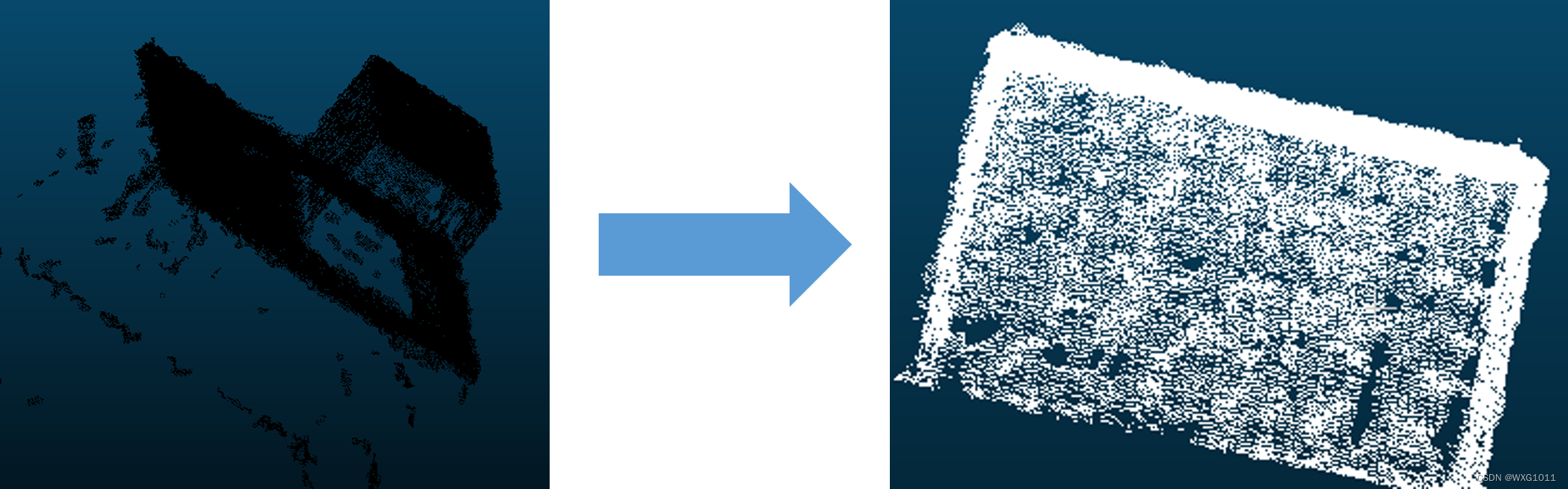
构建三维凸包,分割效果不理想,更换二维凸包后,效果较好。