源自:指挥与控制学报
作者:边晓荟 周少武 张红强 吴亮红 王汐 王茂 刘朝华 陈磊
“人工智能技术与咨询” 发布
摘 要
群机器人在未知动态环境下进行多目标搜索时,存在碰撞预测和搜索效率不高等问题。提出了一种碰撞几何锥和改进惯性权重的粒子群优化算法相结合的多目标搜索策略。首先,根据静、动态威胁物的不同分别引入碰撞锥(CC)和速度障碍法(VO),提出了简化复杂障碍物的膨胀几何法(SG)和一种改进CC和VO的碰撞几何锥模型(CGC);有效解决了复杂不规则威胁物的避碰预测问题,并根据CGC模型作出威胁评估报告以确定最优避障方向。其次,提出一种改进惯性权重的粒子群优化算法(IWPSO),提高了搜索效率同时有效解决了粒子群优化算法易陷入局部最优的问题。最后,将两种改进的方法(CGC-IWPSO)相结合以实现群机器人的多目标任务搜索,相比于简化虚拟受力(SVF)、自适应机器人蝙蝠算法(ARBR)、具有运动学约束的粒子群算法(KCPSO),本文方法在搜索时耗、能耗以及避障次数上分别至少减少了15.59%、10.14%、14.12%。
关键词
群机器人, 多目标搜索, 碰撞冲突预测, 碰撞几何锥, 粒子群优化算法
引言
1 模型构建
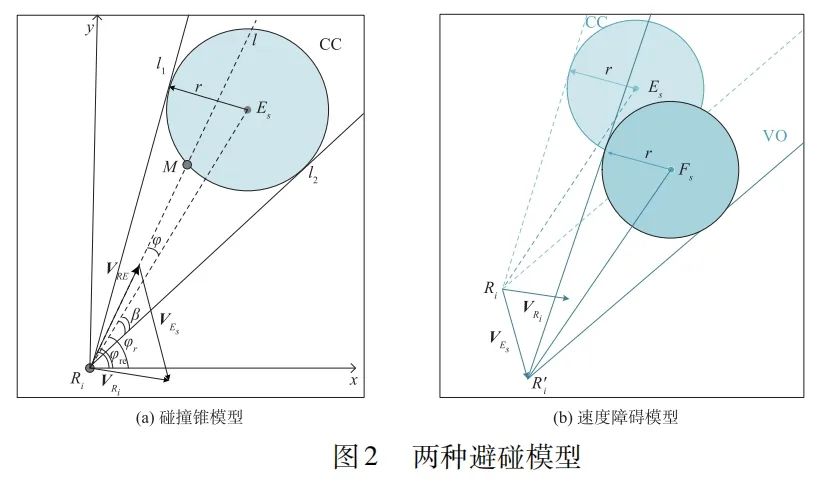
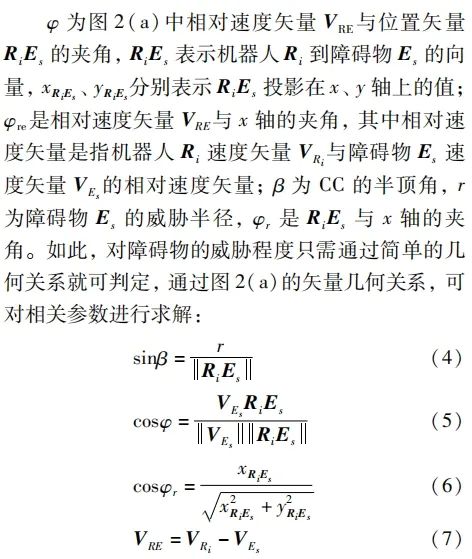
2 群机器人系统避碰模型

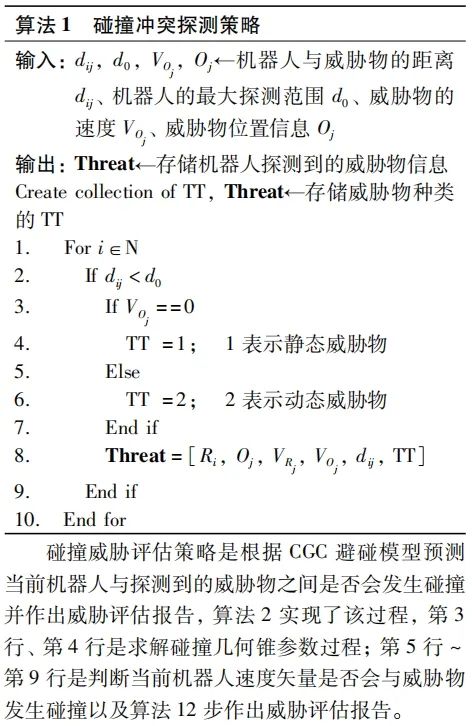
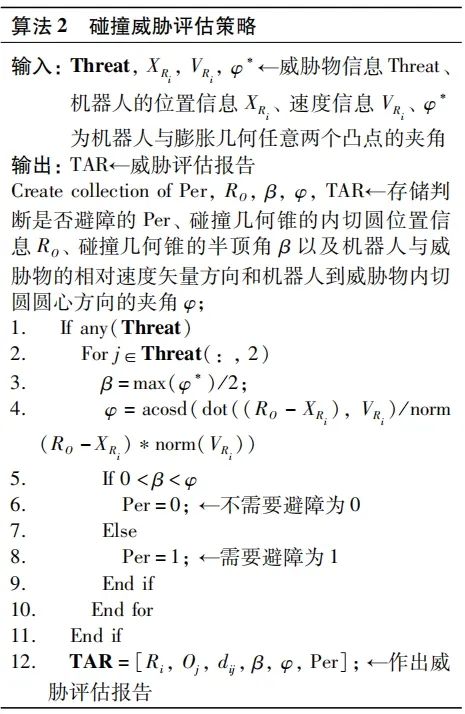
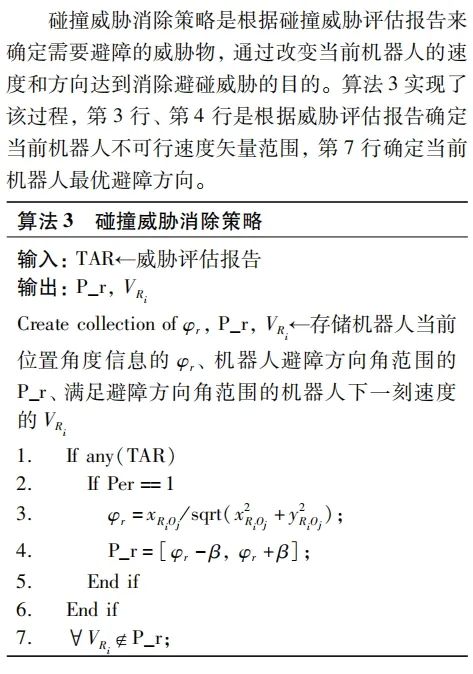
3 群机器人系统控制策略

4 算法收敛性分析


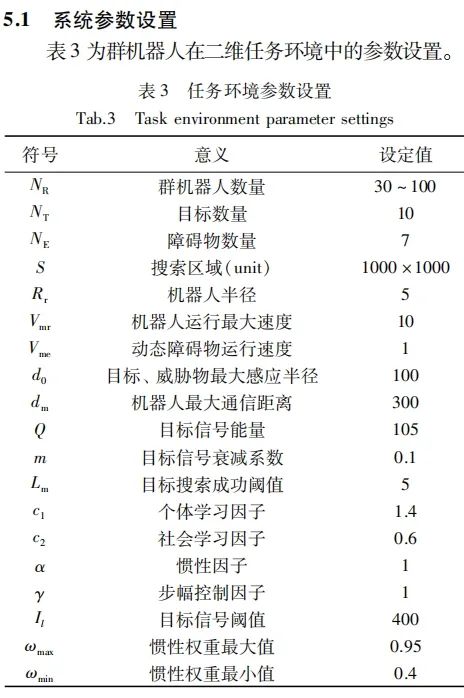
5 仿真实验
6 结论
声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询” 发布