LabVIEW开发航天器模拟器的姿态控制和反作用轮动量管理
在过去十年中,航天器一直是现代技术进步的先决条件。迄今为止,为了更好地完成各种实际任务,已经在航天器姿态控制领域进行了大量研究。航天器一旦进入太空,就容易出现不确定性、外部干扰、执行器饱和等。因此,必须设计一个强大的控制器,能够在存在上述因素的情况下保持其性能。尽管如此,由于反作用轮的可用扭矩和角速度存在限制,因此在控制设计过程中必须考虑这些约束。
滑模控制是应用于航天器姿态控制的最实用和最实用的鲁棒控制器之一。为了实现更快的收敛、高精度和更少的抖振等基本需求,非奇异终端滑模受到了很多关注。利用上述控制器,应向各州施加一些考虑,以实现理想的收敛时间。为了避免这个缺陷,提出了固定时间稳定性理论。与有限时间控制器相比,在此策略中,仅使用控制增益离线获得建立时间的界限。然而,上述大多数控制策略都无法处理航天器执行器和状态约束,而这些对于航空航天系统至关重要。
另一方面,为了获得具有更高精度和性能的控制器,模型预测控制已被用于许多工业应用,例如锅炉,无人机,和航天器,因为它具有优化和处理约束的显着特点。
基于双层控制方法开发了有价值的研究,其中外环稳定姿态并产生所需的角速度。然后,内部循环跟踪设定的角速度并导出控制输入。开发了一种基于自适应经网络和具有SM的动态反演控制器的两层控制器。
尽管航天器的动力学和运动学方程本质上是非线性的,但我们在逻辑上推导了条件,而无需使用任何线性化,在这种条件下可以推导出受约束的MPC输入。所建议的MPC方法显著减轻了计算负担,促进了所提出的控制方法的实时实施。提交方法的主要贡献者和优点概述如下。
1. 提交的双回路控制器配置如下:在第一个(建议的)结构中,外部环路控制器(即SM)在固定时间内稳定姿态并产生所需的角速度。内部回路控制器(即MPC)跟踪设定的角速度,同时将执行器的角速度转向零。在第二种方法中,双回路控制器[23]的滑动表面被扩展,以便它也可以控制RW的角速度。在这种方法中,与第一种方法相反,MPC用于外部回路。此外,内部控制器根据TSM跟踪系统和RW所需的角速度。尽管有上述参考,但级联控制结构有可能仅使用姿态控制器来控制RW的姿态和角动量。
2. 利用李雅普诺夫定理在外部扰动下对闭环系统定时稳定性和有限时间稳定性(包括设计的两用TSM控制器)进行了评价。此外,还分析了所有信号的有界性。
3. 实验结果证实了所提方法的有效性,并与计算机模拟结果进行了比较。此外,已经证明所提出的混合控制结构(第一种方法)显示出许多理想的性能。
使用固定时间TSM从外环获得所需的角速度。然后使用MPC设计最终的约束控制规则。

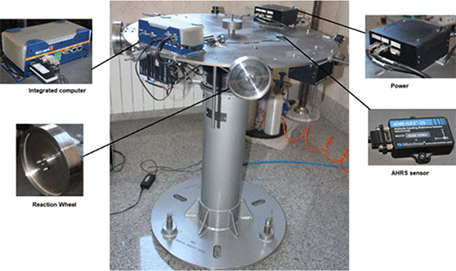
本节通过航天器姿态控制子系统模拟器的实际测试对所提出的复合控制器的性能进行了评估和验证。控制器使用LabVIEW软件实现。
最纯粹的基于SM的方法既不能保证有限的满足感,也不能达到最佳目标点。此外,在大多数纯粹基于MPC的方法中,利用系统的线性化动态来避免非线性优化问题中的内在复杂性。另一方面,所提出的混合技术有条不紊地将MPC和SMC控制器组合在一个集成配置中,没有任何线性化。这种方法大大减少了MPC的计算负担,而且避免了用复杂的非线性MPC方法。
通过整合MPC和TSM的独特属性,设计了两种双层混合控制器。SM控制器确保稳健的姿态稳定目标,MPC考虑了系统的约束并提供最佳控制输入。
这是LabVIEW的一个功能介绍,更多的使用方法与开发案例,欢迎登录官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。