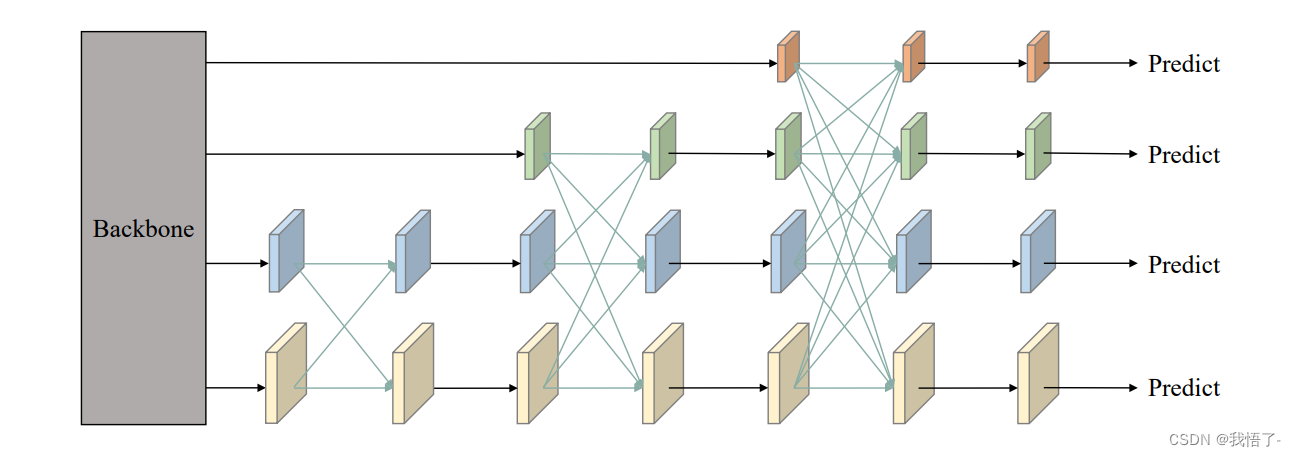
渐近特征金字塔网络(AFPN模块)
在目标检测任务中,多尺度特征对具有尺度差异的目标进行编码具有重要意义。多尺度特征提取的常用策略是采用经典的自顶向下和自底向上的特征金字塔网络。
然而,这些方法存在特征信息丢失或退化的问题,影响了非相邻水平的融合效果。提出了一种支持非相邻层次直接交互的渐近特征金字塔网络(AFPN)。AFPN首先融合两个相邻的低级特征,然后逐渐将高级特征融入融合过程。这样可以避免非相邻层之间较大的语义差距。考虑到在每个空间位置的特征融合过程中可能出现多目标信息冲突,进一步利用自适应空间融合操作来缓解这些不一致。
论文地址:AFPN: Asymptotic Feature Pyramid Network for Object Detection
代码实现
from collections import OrderedDictimport torch
import torch.nn as nn
import torch.nn.functional as Ffrom mmdet.registry import MODELSdef BasicConv(filter_in, filter_out, kernel_size, stride=1, pad=None):if not pad:pad = (kernel_size - 1) // 2 if kernel_size else 0else:pad = padreturn nn.Sequential(OrderedDict([("conv", nn.Conv2d(filter_in, filter_out, kernel_size=kernel_size, stride=stride, padding=pad, bias=False)),("bn", nn.BatchNorm2d(filter_out)),("relu", nn.ReLU(inplace=True)),]))class BasicBlock(nn.Module):expansion = 1def __init__(self, filter_in, filter_out):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(filter_in, filter_out, 3, padding=1)self.bn1 = nn.BatchNorm2d(filter_out, momentum=0.1)self.relu = nn.ReLU(inplace=True)self.conv2 = nn.Conv2d(filter_out, filter_out, 3, padding=1)self.bn2 = nn.BatchNorm2d(filter_out, momentum=0.1)def forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out += residualout = self.relu(out)return outclass Upsample(nn.Module):def __init__(self, in_channels, out_channels, scale_factor=2):super(Upsample, self).__init__()self.upsample = nn.Sequential(BasicConv(in_channels, out_channels, 1),nn.Upsample(scale_factor=scale_factor, mode='bilinear'))# carafe# from mmcv.ops import CARAFEPack# self.upsample = nn.Sequential(# BasicConv(in_channels, out_channels, 1),# CARAFEPack(out_channels, scale_factor=scale_factor)# )def forward(self, x):x = self.upsample(x)return xclass Downsample_x2(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x2, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 2, 2, 0))def forward(self, x, ):x = self.downsample(x)return xclass Downsample_x4(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x4, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 4, 4, 0))def forward(self, x, ):x = self.downsample(x)return xclass Downsample_x8(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x8, self).__init__()self.downsample = nn.Sequential(BasicConv(in_channels, out_channels, 8, 8, 0))def forward(self, x, ):x = self.downsample(x)return xclass ASFF_2(nn.Module):def __init__(self, inter_dim=512):super(ASFF_2, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 2, 2, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :]out = self.conv(fused_out_reduced)return outclass ASFF_3(nn.Module):def __init__(self, inter_dim=512):super(ASFF_3, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_3 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 3, 3, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2, input3):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)level_3_weight_v = self.weight_level_3(input3)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v, level_3_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :] + \input3 * levels_weight[:, 2:, :, :]out = self.conv(fused_out_reduced)return outclass ASFF_4(nn.Module):def __init__(self, inter_dim=512):super(ASFF_4, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_0 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_3 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 4, 4, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input0, input1, input2, input3):level_0_weight_v = self.weight_level_0(input0)level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)level_3_weight_v = self.weight_level_3(input3)levels_weight_v = torch.cat((level_0_weight_v, level_1_weight_v, level_2_weight_v, level_3_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input0 * levels_weight[:, 0:1, :, :] + \input1 * levels_weight[:, 1:2, :, :] + \input2 * levels_weight[:, 2:3, :, :] + \input3 * levels_weight[:, 3:, :, :]out = self.conv(fused_out_reduced)return outclass BlockBody(nn.Module):def __init__(self, channels=[64, 128, 256, 512]):super(BlockBody, self).__init__()self.blocks_scalezero1 = nn.Sequential(BasicConv(channels[0], channels[0], 1),)self.blocks_scaleone1 = nn.Sequential(BasicConv(channels[1], channels[1], 1),)self.blocks_scaletwo1 = nn.Sequential(BasicConv(channels[2], channels[2], 1),)self.blocks_scalethree1 = nn.Sequential(BasicConv(channels[3], channels[3], 1),)self.downsample_scalezero1_2 = Downsample_x2(channels[0], channels[1])self.upsample_scaleone1_2 = Upsample(channels[1], channels[0], scale_factor=2)self.asff_scalezero1 = ASFF_2(inter_dim=channels[0])self.asff_scaleone1 = ASFF_2(inter_dim=channels[1])self.blocks_scalezero2 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone2 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.downsample_scalezero2_2 = Downsample_x2(channels[0], channels[1])self.downsample_scalezero2_4 = Downsample_x4(channels[0], channels[2])self.downsample_scaleone2_2 = Downsample_x2(channels[1], channels[2])self.upsample_scaleone2_2 = Upsample(channels[1], channels[0], scale_factor=2)self.upsample_scaletwo2_2 = Upsample(channels[2], channels[1], scale_factor=2)self.upsample_scaletwo2_4 = Upsample(channels[2], channels[0], scale_factor=4)self.asff_scalezero2 = ASFF_3(inter_dim=channels[0])self.asff_scaleone2 = ASFF_3(inter_dim=channels[1])self.asff_scaletwo2 = ASFF_3(inter_dim=channels[2])self.blocks_scalezero3 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone3 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.blocks_scaletwo3 = nn.Sequential(BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),)self.downsample_scalezero3_2 = Downsample_x2(channels[0], channels[1])self.downsample_scalezero3_4 = Downsample_x4(channels[0], channels[2])self.downsample_scalezero3_8 = Downsample_x8(channels[0], channels[3])self.upsample_scaleone3_2 = Upsample(channels[1], channels[0], scale_factor=2)self.downsample_scaleone3_2 = Downsample_x2(channels[1], channels[2])self.downsample_scaleone3_4 = Downsample_x4(channels[1], channels[3])self.upsample_scaletwo3_4 = Upsample(channels[2], channels[0], scale_factor=4)self.upsample_scaletwo3_2 = Upsample(channels[2], channels[1], scale_factor=2)self.downsample_scaletwo3_2 = Downsample_x2(channels[2], channels[3])self.upsample_scalethree3_8 = Upsample(channels[3], channels[0], scale_factor=8)self.upsample_scalethree3_4 = Upsample(channels[3], channels[1], scale_factor=4)self.upsample_scalethree3_2 = Upsample(channels[3], channels[2], scale_factor=2)self.asff_scalezero3 = ASFF_4(inter_dim=channels[0])self.asff_scaleone3 = ASFF_4(inter_dim=channels[1])self.asff_scaletwo3 = ASFF_4(inter_dim=channels[2])self.asff_scalethree3 = ASFF_4(inter_dim=channels[3])self.blocks_scalezero4 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),)self.blocks_scaleone4 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),)self.blocks_scaletwo4 = nn.Sequential(BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),)self.blocks_scalethree4 = nn.Sequential(BasicBlock(channels[3], channels[3]),BasicBlock(channels[3], channels[3]),BasicBlock(channels[3], channels[3]),BasicBlock(channels[3], channels[3]),)def forward(self, x):x0, x1, x2, x3 = xx0 = self.blocks_scalezero1(x0)x1 = self.blocks_scaleone1(x1)x2 = self.blocks_scaletwo1(x2)x3 = self.blocks_scalethree1(x3)scalezero = self.asff_scalezero1(x0, self.upsample_scaleone1_2(x1))scaleone = self.asff_scaleone1(self.downsample_scalezero1_2(x0), x1)x0 = self.blocks_scalezero2(scalezero)x1 = self.blocks_scaleone2(scaleone)scalezero = self.asff_scalezero2(x0, self.upsample_scaleone2_2(x1), self.upsample_scaletwo2_4(x2))scaleone = self.asff_scaleone2(self.downsample_scalezero2_2(x0), x1, self.upsample_scaletwo2_2(x2))scaletwo = self.asff_scaletwo2(self.downsample_scalezero2_4(x0), self.downsample_scaleone2_2(x1), x2)x0 = self.blocks_scalezero3(scalezero)x1 = self.blocks_scaleone3(scaleone)x2 = self.blocks_scaletwo3(scaletwo)scalezero = self.asff_scalezero3(x0, self.upsample_scaleone3_2(x1), self.upsample_scaletwo3_4(x2), self.upsample_scalethree3_8(x3))scaleone = self.asff_scaleone3(self.downsample_scalezero3_2(x0), x1, self.upsample_scaletwo3_2(x2), self.upsample_scalethree3_4(x3))scaletwo = self.asff_scaletwo3(self.downsample_scalezero3_4(x0), self.downsample_scaleone3_2(x1), x2, self.upsample_scalethree3_2(x3))scalethree = self.asff_scalethree3(self.downsample_scalezero3_8(x0), self.downsample_scaleone3_4(x1), self.downsample_scaletwo3_2(x2), x3)scalezero = self.blocks_scalezero4(scalezero)scaleone = self.blocks_scaleone4(scaleone)scaletwo = self.blocks_scaletwo4(scaletwo)scalethree = self.blocks_scalethree4(scalethree)return scalezero, scaleone, scaletwo, scalethree@MODELS.register_module()
class AFPN(nn.Module):def __init__(self,in_channels=[256, 512, 1024, 2048],out_channels=256):super(AFPN, self).__init__()self.fp16_enabled = Falseself.conv0 = BasicConv(in_channels[0], in_channels[0] // 8, 1)self.conv1 = BasicConv(in_channels[1], in_channels[1] // 8, 1)self.conv2 = BasicConv(in_channels[2], in_channels[2] // 8, 1)self.conv3 = BasicConv(in_channels[3], in_channels[3] // 8, 1)self.body = nn.Sequential(BlockBody([in_channels[0] // 8, in_channels[1] // 8, in_channels[2] // 8, in_channels[3] // 8]))self.conv00 = BasicConv(in_channels[0] // 8, out_channels, 1)self.conv11 = BasicConv(in_channels[1] // 8, out_channels, 1)self.conv22 = BasicConv(in_channels[2] // 8, out_channels, 1)self.conv33 = BasicConv(in_channels[3] // 8, out_channels, 1)self.conv44 = nn.MaxPool2d(kernel_size=1, stride=2)# init weightfor m in self.modules():if isinstance(m, nn.Conv2d):nn.init.xavier_normal_(m.weight, gain=0.02)elif isinstance(m, nn.BatchNorm2d):torch.nn.init.normal_(m.weight.data, 1.0, 0.02)torch.nn.init.constant_(m.bias.data, 0.0)def forward(self, x):x0, x1, x2, x3 = xx0 = self.conv0(x0)x1 = self.conv1(x1)x2 = self.conv2(x2)x3 = self.conv3(x3)out0, out1, out2, out3 = self.body([x0, x1, x2, x3])out0 = self.conv00(out0)out1 = self.conv11(out1)out2 = self.conv22(out2)out3 = self.conv33(out3)out4 = self.conv44(out3)return out0, out1, out2, out3, out4if __name__ == "__main__":print()
YOLOv5添加AFPN模块
YOLOv8、YOLOv7、YOLOv5、YOLOv4、Faster-rcnn等目标检测算法都可以使用,YOLOv5添加AFPN模块代码实例如下:
from collections import OrderedDict
import torch
import torch.nn as nn
import torch.nn.functional as Ffrom mmyolo.registry import MODELSdef BasicConv(filter_in, filter_out, kernel_size, stride=1):pad = (kernel_size - 1) // 2 if kernel_size else 0return nn.Sequential(OrderedDict([("conv", nn.Conv2d(filter_in, filter_out, kernel_size=kernel_size, stride=stride, padding=pad, bias=False)),("bn", nn.BatchNorm2d(filter_out)),("silu", nn.SiLU(inplace=True)),]))def Conv(filter_in, filter_out, kernel_size, stride=1, pad=0):return nn.Sequential(OrderedDict([("conv", nn.Conv2d(filter_in, filter_out, kernel_size=kernel_size, stride=stride, padding=pad, bias=False)),("bn", nn.BatchNorm2d(filter_out)),("silu", nn.SiLU(inplace=True)),]))class BasicBlock(nn.Module):expansion = 1def __init__(self, filter_in, filter_out):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(filter_in, filter_out, 3, padding=1)self.bn1 = nn.BatchNorm2d(filter_out, momentum=0.1)self.silu = nn.SiLU(inplace=True)self.conv2 = nn.Conv2d(filter_out, filter_out, 3, padding=1)self.bn2 = nn.BatchNorm2d(filter_out, momentum=0.1)def forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.silu(out)out = self.conv2(out)out = self.bn2(out)out += residualout = self.silu(out)return outclass Upsample(nn.Module):def __init__(self, in_channels, out_channels, scale_factor=2):super(Upsample, self).__init__()self.upsample = nn.Sequential(BasicConv(in_channels, out_channels, 1),nn.Upsample(scale_factor=scale_factor, mode='bilinear'))def forward(self, x, ):x = self.upsample(x)return xclass Downsample_x2(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x2, self).__init__()self.downsample = nn.Sequential(Conv(in_channels, out_channels, 2, 2))def forward(self, x, ):x = self.downsample(x)return xclass Downsample_x4(nn.Module):def __init__(self, in_channels, out_channels):super(Downsample_x4, self).__init__()self.downsample = nn.Sequential(Conv(in_channels, out_channels, 4, 4))def forward(self, x, ):x = self.downsample(x)return xclass ASFF_2(nn.Module):def __init__(self, inter_dim=512):super(ASFF_2, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 2, 2, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :]out = self.conv(fused_out_reduced)return outclass ASFF_3(nn.Module):def __init__(self, inter_dim=512):super(ASFF_3, self).__init__()self.inter_dim = inter_dimcompress_c = 8self.weight_level_1 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_level_3 = BasicConv(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c * 3, 3, kernel_size=1, stride=1, padding=0)self.conv = BasicConv(self.inter_dim, self.inter_dim, 3, 1)def forward(self, input1, input2, input3):level_1_weight_v = self.weight_level_1(input1)level_2_weight_v = self.weight_level_2(input2)level_3_weight_v = self.weight_level_3(input3)levels_weight_v = torch.cat((level_1_weight_v, level_2_weight_v, level_3_weight_v), 1)levels_weight = self.weight_levels(levels_weight_v)levels_weight = F.softmax(levels_weight, dim=1)fused_out_reduced = input1 * levels_weight[:, 0:1, :, :] + \input2 * levels_weight[:, 1:2, :, :] + \input3 * levels_weight[:, 2:, :, :]out = self.conv(fused_out_reduced)return outclass ScaleBlockBody(nn.Module):def __init__(self, channels=[128, 256, 512]):super(ScaleBlockBody, self).__init__()self.blocks_top1 = nn.Sequential(BasicConv(channels[0], channels[0], 1),)self.blocks_mid1 = nn.Sequential(BasicConv(channels[1], channels[1], 1),)self.blocks_bot1 = nn.Sequential(BasicConv(channels[2], channels[2], 1),)self.downsample_top1_2 = Downsample_x2(channels[0], channels[1])self.upsample_mid1_2 = Upsample(channels[1], channels[0], scale_factor=2)self.asff_top1 = ASFF_2(inter_dim=channels[0])self.asff_mid1 = ASFF_2(inter_dim=channels[1])self.blocks_top2 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]))self.blocks_mid2 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]))self.downsample_top2_2 = Downsample_x2(channels[0], channels[1])self.downsample_top2_4 = Downsample_x4(channels[0], channels[2])self.downsample_mid2_2 = Downsample_x2(channels[1], channels[2])self.upsample_mid2_2 = Upsample(channels[1], channels[0], scale_factor=2)self.upsample_bot2_2 = Upsample(channels[2], channels[1], scale_factor=2)self.upsample_bot2_4 = Upsample(channels[2], channels[0], scale_factor=4)self.asff_top2 = ASFF_3(inter_dim=channels[0])self.asff_mid2 = ASFF_3(inter_dim=channels[1])self.asff_bot2 = ASFF_3(inter_dim=channels[2])self.blocks_top3 = nn.Sequential(BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]),BasicBlock(channels[0], channels[0]))self.blocks_mid3 = nn.Sequential(BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]),BasicBlock(channels[1], channels[1]))self.blocks_bot3 = nn.Sequential(BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]),BasicBlock(channels[2], channels[2]))def forward(self, x):x1, x2, x3 = xx1 = self.blocks_top1(x1)x2 = self.blocks_mid1(x2)x3 = self.blocks_bot1(x3)top = self.asff_top1(x1, self.upsample_mid1_2(x2))mid = self.asff_mid1(self.downsample_top1_2(x1), x2)x1 = self.blocks_top2(top)x2 = self.blocks_mid2(mid)top = self.asff_top2(x1, self.upsample_mid2_2(x2), self.upsample_bot2_4(x3))mid = self.asff_mid2(self.downsample_top2_2(x1), x2, self.upsample_bot2_2(x3))bot = self.asff_bot2(self.downsample_top2_4(x1), self.downsample_mid2_2(x2), x3)top = self.blocks_top3(top)mid = self.blocks_mid3(mid)bot = self.blocks_bot3(bot)return top, mid, bot@MODELS.register_module()
class YOLOv5AFPN(nn.Module):def __init__(self, in_channels=[256, 512, 1024], out_channels=[256, 512, 1024]):super(YOLOv5AFPN, self).__init__()self.conv1 = BasicConv(in_channels[0], in_channels[0] // 4, 1)self.conv2 = BasicConv(in_channels[1], in_channels[1] // 4, 1)self.conv3 = BasicConv(in_channels[2], in_channels[2] // 4, 1)self.body = nn.Sequential(ScaleBlockBody([in_channels[0] // 4, in_channels[1] // 4, in_channels[2] // 4]))self.conv11 = BasicConv(in_channels[0] // 4, out_channels[0], 1)self.conv22 = BasicConv(in_channels[1] // 4, out_channels[1], 1)self.conv33 = BasicConv(in_channels[2] // 4, out_channels[2], 1)# ----------------------------------------------------------------## init weight# ----------------------------------------------------------------#for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.xavier_normal_(m.weight, gain=0.02)elif isinstance(m, nn.BatchNorm2d):torch.nn.init.normal_(m.weight.data, 1.0, 0.02)torch.nn.init.constant_(m.bias.data, 0.0)def forward(self, x):x1, x2, x3 = xx1 = self.conv1(x1)x2 = self.conv2(x2)x3 = self.conv3(x3)out1, out2, out3 = self.body([x1, x2, x3])out1 = self.conv11(out1)out2 = self.conv22(out2)out3 = self.conv33(out3)return tuple([out1, out2, out3])