1、将通信时序的逻辑理解透彻,并且能够独立看懂其他器件的时序图。
随着我们对通信技术的深入学习,大家要逐渐在头脑中建立起时序这种概念。所谓“时序”从字面意义上来理解,一是“时间问题”,二是“顺序问题”。
先说“顺序问题”,这个相对简单一些。我们在学UART串口通信的时候,先1位起始位,再8位数据位,最后1位停止位,这个先后顺序不能错。我们在学1602液晶的时候,比如写指令,RS=L,R/W=L,D0~D7=指令码,这三者的顺序是无所谓的,但是最终的E=高脉冲,必须是在这三条程序之后,这个顺序一旦错误,写的数据也可会出错。
“时间问题”内容相对复杂。比如UART通信,每一位的时间宽度是1/baud。我们初中就学过一个概念,世界上没有绝对的准确。那么每一位的时间宽度1/baud要求精确到什么范围内呢?
前边教程我提到过,单片机读取UART的RXD引脚数据的时候,一位数据,单片机平均分成了16份,取其中的7、8、9三次读到的结果,这三次中有2次是高电平那这一位就是1,有2次是低电平,那这一次就是0。如果我们的波特率稍微有些偏差,只要累计下来到最后一位停止位,这7、8、9还在范围内即可。
2、根据1602整屏移动程序,改写成整屏右移的程序。
#include <reg52.h>#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;bit flag500ms = 0; //500ms¶¨Ê±±êÖ¾
unsigned char T0RH = 0; //T0ÖØÔØÖµµÄ¸ß×Ö½Ú
unsigned char T0RL = 0; //T0ÖØÔØÖµµÄµÍ×Ö½Úunsigned char code str1[] = "Kingst Studio";
//´ýÏÔʾµÄµÚ¶þÐÐ×Ö·û´®£¬Ðè±£³ÖÓëµÚÒ»ÐÐ×Ö·û´®µÈ³¤£¬½Ï¶ÌµÄÐпÉÓÿոñ²¹Æë
unsigned char code str2[] = "Let's move...";void ConfigTimer0(unsigned int ms);
void InitLcd1602();
void LcdShowStr(unsigned char x, unsigned char y,unsigned char *str, unsigned char len);
void main()
{unsigned char i;unsigned char index = 0; //Òƶ¯Ë÷Òýunsigned char pdata bufMove1[16+sizeof(str1)+16]; //Òƶ¯ÏÔʾ»º³åÇø1unsigned char pdata bufMove2[16+sizeof(str2)+16]; //Òƶ¯ÏÔʾ»º³åÇø2EA = 1;ConfigTimer0(10);InitLcd1602();for(i = 0;i <= 16;i++){bufMove1[i] = ' ';bufMove2[i] = ' ';}for(i = 0;i <= 16;i++){bufMove1[16+i] = str1[i];bufMove2[16+i] = str2[i];}for(i = 16+sizeof(str1)-1;i < sizeof(bufMove1);i++){bufMove1[i] = ' ';bufMove2[i] = ' ';}while(1){if(flag500ms){flag500ms = 0;index--;if(index < 0){index = 15 + sizeof(str1)-1;}LcdShowStr(0,0,bufMove1+index,16);LcdShowStr(0,1,bufMove2+index,16); }
}
}
void ConfigTimer0(unsigned int ms)
{unsigned long tmp;tmp = 11059200 / 12;tmp = tmp*ms/1000;tmp = 65536 - tmp;tmp += 12;T0RH = (unsigned char)(tmp>>8);T0RL = (unsigned char)tmp;TMOD &= 0X0F;TMOD |= 0X01;TH0 = T0RH;TL0 = T0RL;ET0 = 1;TR0 = 1;
}
void LcdWaitReady()
{unsigned int sec;LCD1602_DB = 0xff;LCD1602_RS = 0;LCD1602_RW = 1;do{LCD1602_E = 1;sec = LCD1602_DB;LCD1602_E = 0;}while(sec & 0x80);
}
void LcdWriteCmd(unsigned char cmd)
{LcdWaitReady();LCD1602_RS = 0;LCD1602_RW = 0;LCD1602_DB = cmd;LCD1602_E = 1;LCD1602_E = 0;
}
void LcdWriteDat(unsigned char dat)
{LcdWaitReady();LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DB = dat;LCD1602_E = 1;LCD1602_E = 0;
}
void LcdSetCursor(unsigned char x, unsigned char y)
{unsigned char add;if(y == 0){add = 0x00 + x;}elseadd = 0x40 + x;LcdWriteCmd(add | 0x80);
}
void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str, unsigned char len)
{LcdSetCursor(x, y);if(len--){LcdWriteDat(*str++);}}
void InitLcd1602()
{LcdWriteCmd(0x38);LcdWriteCmd(0x0C);LcdWriteCmd(0x06);LcdWriteCmd(0x01);
}
void InterruptTimer0() interrupt 1
{static unsigned char tmr500ms = 0;TH0 = T0RH;TL0 = T0RL;tmr500ms++;if(tmr500ms >= 50){tmr500ms = 0;flag500ms = 1;}
}
3、掌握多.c源文件编写代码的方法以及调用其他文件中变量和函数的方法。
我们上一节的这个液晶滚屏移动程序,大概有160行左右。随着我们硬件模块使用的增多,程序量的增大,我们往往要把程序写到多个文件里,方便代码的编写、维护和移植。
比如这个液晶滚屏程序,我们就可以把1602底层的功能函数专门写到一个.c文件内, 如LcdWaitReady、LcdWriteCmd、LcdWriteDat、LcdShowStr、LcdSetCursor、InitLcd1602这些函数,都是属于液晶底层驱动的程序代码,我们要使用液晶功能的时候,只有两个函数对我们实际功能实现部分有用,一个是InitLcd1602这个函数,因为需要先初始化液晶,另外一个就是LcdShowStr这个函数,我们只需要把要显示的内容通过参数传递给这个函数,这个函数就可以实现我们想要的显示效果,所以我们把这几个底层的液晶驱动程序都放到另外一个文件Lcd1602.c文件中,而我们想实现的一些比如滚动实现、中断等上层功能程序全部都放到main.c中,但是main.c文件如何调用Lcd1602.c文件中的函数呢?
C语言中,有一个extern关键字,它有两个基本作用。
1、当一个变量的声明不在文件的开头,在它声明之前的函数想要引用的话,则应该用extern进行“外部变量”声明。用一个简单的程序给大家介绍一下,知道这么回事,能看懂别人写的就行,自己写就别这么用了。
#include <reg52.h>
sbit LED = P0^0;
void main()
{
extern unsigned int i;
while(1)
{
LED = 0; //点亮小灯
for(i=0;i<30000;i++); //延时
LED = 1; //熄灭小灯
for(i=0;i<30000;i++); //延时
}
}
unsigned int i = 0;
... ...
变量的作用域,是从声明这个变量开始往后所有的程序,如果我们调用在前,声明在后,那么就是这么用。但是实际开发过程中,我们一般都不会这样做,所以仅仅是表达一下extern的这个用法,但它并不实用。
2、在一个工程中,我们为了方便管理和维护代码,用了多个.c源文件,如果其中一个main.c文件要调用Lcd1602.c文件里的变量或者函数的时候,我们就必须得在main.c里边进行一下外部声明,告诉编译器这个变量或者函数是在其它文件中定义的,可以直接在这个文件中进行调用。
多.c文件的编程方式,大家不要想象的太复杂。首先新建一个工程,一个工程代表一个完整的单片机程序,只能生成一个hex,但是一个工程可以有很多个.c源文件组成共同参与编译。工程建立好之后,新建文件并且保存取名为main.c文件,再新建一个文件并且保存取名为Lcd1602.c文件,下面我们就可以在两个不同文件中分别编写代码了。当然,在编写程序的过程中,不是说我们要先把main.c的文件全部写完,再进行1602.c程序的编写,而往往是交互的。比如我们先写Lcd1602.c文件中部分Lcd1602液晶的底层函数LcdWaitReady、LcdWriteCmd、LcdWriteDat、InitLcd1602,然后编写main.c文件中的功能程序,在编写main.c文件中程序时,又有对Lcd1602.c底层程序的综合调用,这个时候需要Lcd1602.c文件提供一个被调用的函数比如LcdShowStr,我们就可以再到Lcd1602.c中把这个函数完成。当然了,这仅仅是一个说明例子而已,顺序完全是没有一个标准的,实际应用中如果对程序逻辑需求了解透彻,根据自己的理解去写程序即可。那我们把1602整屏移动的程序改造成为多文件的程序,大家先初步认识一下。
/***************************Lcd1602.c文件程序源代码*****************************/
#include <reg52.h>
#define LCD1602_DB P0
sbit LCD1602_RS = P1^0;
sbit LCD1602_RW = P1^1;
sbit LCD1602_E = P1^5;
/* 等待液晶准备好 */
void LcdWaitReady()
{
unsigned char sta;
LCD1602_DB = 0xFF;
LCD1602_RS = 0;
LCD1602_RW = 1;
do {
LCD1602_E = 1;
sta = LCD1602_DB; //读取状态字
LCD1602_E = 0;
} while (sta & 0x80); //bit7等于1表示液晶正忙,重复检测直到其等于0为止
}
/* 向LCD1602液晶写入一字节命令,cmd-待写入命令值 */
void LcdWriteCmd(unsigned char cmd)
{
LcdWaitReady();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_E = 1;
LCD1602_E = 0;
}
/* 向LCD1602液晶写入一字节数据,dat-待写入数据值 */
void LcdWriteDat(unsigned char dat)
{
LcdWaitReady();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_E = 1;
LCD1602_E = 0;
}
/* 设置显示RAM起始地址,亦即光标位置,(x,y)-对应屏幕上的字符坐标 */
void LcdSetCursor(unsigned char x, unsigned char y)
{
unsigned char addr;
if (y == 0) //由输入的屏幕坐标计算显示RAM的地址
addr = 0x00 + x; //第一行字符地址从0x00起始
else
addr = 0x40 + x; //第二行字符地址从0x40起始
LcdWriteCmd(addr | 0x80); //设置RAM地址
}
/* 在液晶上显示字符串,(x,y)-对应屏幕上的起始坐标,
str-字符串指针,len-需显示的字符长度 */
void LcdShowStr(unsigned char x, unsigned char y,
unsigned char *str, unsigned char len)
{
LcdSetCursor(x, y); //设置起始地址
while (len--) //连续写入len个字符数据
{
LcdWriteDat(*str++);
}
}
/* 初始化1602液晶 */
void InitLcd1602()
{
LcdWriteCmd(0x38); //16*2显示,5*7点阵,8位数据接口
LcdWriteCmd(0x0C); //显示器开,光标关闭
LcdWriteCmd(0x06); //文字不动,地址自动+1
LcdWriteCmd(0x01); //清屏
}
/*****************************main.c文件程序源代码******************************/
#include <reg52.h>
bit flag500ms = 0; //500ms定时标志
unsigned char T0RH = 0; //T0重载值的高字节
unsigned char T0RL = 0; //T0重载值的低字节
//待显示的第一行字符串
unsigned char code str1[] = "Kingst Studio";
//待显示的第二行字符串,需保持与第一行字符串等长,较短的行可用空格补齐
unsigned char code str2[] = "Let's move...";
void ConfigTimer0(unsigned int ms);
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y,
unsigned char *str, unsigned char len);
void main()
{
unsigned char i;
unsigned char index = 0; //移动索引
unsigned char pdata bufMove1[16+sizeof(str1)+16]; //移动显示缓冲区1
unsigned char pdata bufMove2[16+sizeof(str2)+16]; //移动显示缓冲区2
EA = 1; //开总中断
ConfigTimer0(10); //配置T0定时10ms
InitLcd1602(); //初始化液晶
//缓冲区开头一段填充为空格
for (i=0; i<16; i++)
{
bufMove1[i] = ' ';
bufMove2[i] = ' ';
}
//待显示字符串拷贝到缓冲区中间位置
for (i=0; i<(sizeof(str1)-1); i++)
{
bufMove1[16+i] = str1[i];
bufMove2[16+i] = str2[i];
}
//缓冲区结尾一段也填充为空格
for (i=(16+sizeof(str1)-1); i<sizeof(bufMove1); i++)
{
bufMove1[i] = ' ';
bufMove2[i] = ' ';
}
while (1)
{
if (flag500ms) //每500ms移动一次屏幕
{
flag500ms = 0;
//从缓冲区抽出需显示的一段字符显示到液晶上
LcdShowStr(0, 0, bufMove1+index, 16);
LcdShowStr(0, 1, bufMove2+index, 16);
//移动索引递增,实现左移
index++;
if (index >= (16+sizeof(str1)-1))
{ //起始位置达到字符串尾部后即返回从头开始
index = 0;
}
}
}
}
/* 配置并启动T0,ms-T0定时时间 */
void ConfigTimer0(unsigned int ms)
{
unsigned long tmp; //临时变量
tmp = 11059200 / 12; //定时器计数频率
tmp = (tmp * ms) / 1000; //计算所需的计数值
tmp = 65536 - tmp;
tmp = tmp + 12; //补偿中断响应延时造成的误差
T0RH = (unsigned char)(tmp>>8); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零T0的控制位
TMOD |= 0x01; //配置T0为模式1
TH0 = T0RH; //加载T0重载值
TL0 = T0RL;
ET0 = 1; //使能T0中断
TR0 = 1; //启动T0
}
/* T0中断服务函数,定时500ms */
void InterruptTimer0() interrupt 1
{
static unsigned char tmr500ms = 0;
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
tmr500ms++;
if (tmr500ms >= 50)
{
tmr500ms = 0;
flag500ms = 1;
}
}
我们在main.c中要调用Lcd1602.c文件中的InitLcd1602()和LcdShowStr这两个函数,只需要在main.c中进行extern声明即可。大家用Keil软件编程试试,真正的感觉一下多.c源文件的好处。
4、底理解实用串口通信机制程序,能够完全就解析明白实用串口通信例程,为今后自己独立编写类似程序打下基础。
我们前边学串口通信的时候,比较注重的是串口底层时序上的操作过程,所以例程都是简单的收发字符或者字符串。在实际应用中,往往串口还要和电脑上的上位机软件进行交互,实现电脑软件发送不同的指令,单片机对应执行不同操作的功能,这就要求我们组织一个比较合理的通信机制和逻辑关系,用来实现我们想要的结果。
本节所提供程序的功能是,通过电脑串口调试助手下发三个不同的命令,第一条指令:buzz on可以让蜂鸣器响;第二条指令:buzz off可以让蜂鸣器不响;第三条指令:showstr ,这个命令空格后边,可以添加任何字符串,让后边的字符串在1602液晶上显示出来,同时不管发送什么命令,单片机收到后把命令原封不动的再通过串口发送给电脑,以表示“我收到了……你可以检查下对不对”。这样的感觉是不是更像是一个小项目了呢?
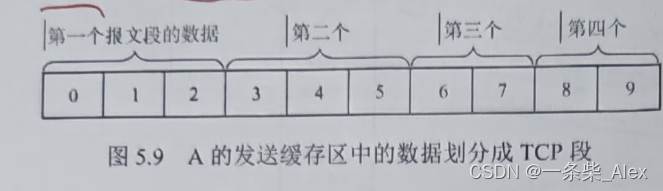
对于串口通信部分来说,单片机给电脑发字符串好说,有多大的数组,我们就发送多少个字节即可,但是单片机接收数据,接收多少个才应该是一帧完整的数据呢?数据接收起始头在哪里,结束在哪里?这些我们在接收到数据前都是无从得知的。那怎么办呢?
我们的编程思路基于这样一种通常的事实:当需要发送一帧(多个字节)数据时,这些数据都是连续不断的发送的,即发送完一个字节后会紧接着发送下一个字节,期间没有间隔或间隔很短,而当这一帧数据都发送完毕后,就会间隔很长一段时间(相对于连续发送时的间隔来讲)不再发送数据,也就是通信总线上会空闲一段较长的时间。于是我们就建立这样一种程序机制:设置一个软件的总线空闲定时器,这个定时器在有数据传输时(从单片机接收角度来说就是接收到数据时)清零,而在总线空闲时(也就是没有接收到数据时)时累加,当它累加到一定时间(例程里是30ms)后,我们就可以认定一帧完整的数据已经传输完毕了,于是告诉其它程序可以来处理数据了,本次的数据处理完后就恢复到初始状态,再准备下一次的接收。那么这个用于判定一帧结束的空闲时间取多少合适呢?它取决于多个条件,并没有一个固定值,我们这里介绍几个需要考虑的原则:第一,这个时间必须大于波特率周期,很明显我们的单片机接收中断产生是在一个字节接收完毕后,也就是一个时刻点,而其接收过程我们的程序是无从知晓的,因此在至少一个波特率周期内你绝不能认为空闲已经时间达到了。第二,要考虑发送方的系统延时,因为不是所有的发送方都能让数据严格无间隔的发送,因为软件响应、关中断、系统临界区等等操作都会引起延时,所以还得再附加几个到十几个ms的时间。我们选取的30ms是一个折中的经验值,它能适应大部分的波特率(大于1200)和大部分的系统延时(PC机或其它单片机系统)情况。