💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
2.1 IEEE9节点
2.2 IEEE68节点
🎉3 参考文献
🌈4 Matlab代码、数据、文章

💥1 概述
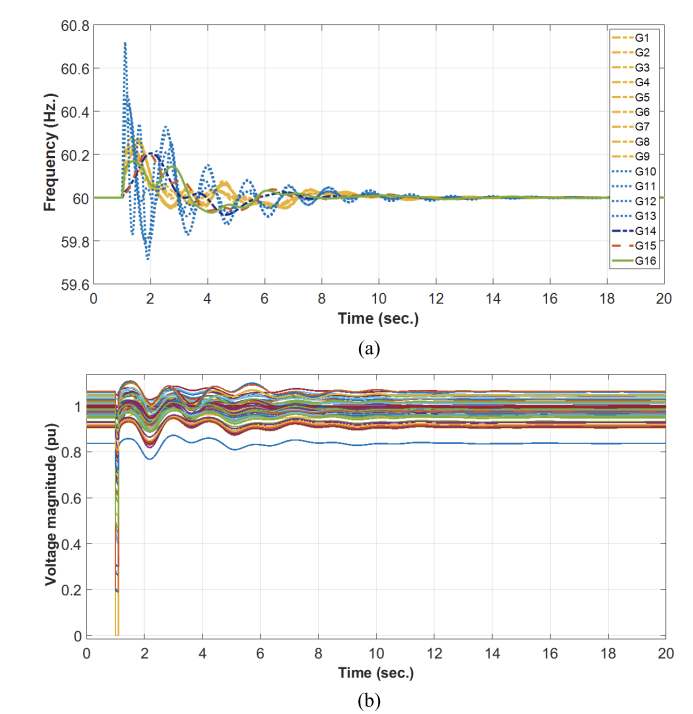
本文介绍了为电力系统动态分析开发的基于 MATLAB 的程序。可以获得时域仿真、系统线性化、模态分析、参与因子分析和可视化、控制器的优化放置、反馈信号选择、频率响应分析和控制设计。除了解决电力系统问题外,该软件包还提供模型在时域和状态空间中的符号和矢量化表示。该软件包充分利用了 MATLAB 强大的求解器的优势,用于求解非刚性和刚性问题。显式和隐式技术都用于求解微分代数方程 (DAE)。假设同步电机配备了励磁器、涡轮和稳定器。负载可以建模为电压相关负载和独立负载。本文使用的测试系统是IEEE 9节点和68节点系统,以及德克萨斯州的2007节点合成电源系统。不同类型的干扰应用于系统,包括发电机侧和网络侧干扰。
📚2 运行结果
2.1 IEEE9节点





2.2 IEEE68节点


部分代码:
%%%----------------------------% LL-1--------------------------------------
T1_LL1 = realp('T1_LL1',1); % T1 coefficient (name and initial value)
T2_LL1 = realp('T2_LL1',0.1); % T2 coefficient
T1_LL1.Minimum = 0.1; T1_LL1.Maximum = 1; % Set min-max values for T1
T2_LL1.Minimum = 0.01; T2_LL1.Maximum = 0.1; % Set min-max values for T2
T1_LL1.Free = true;
T2_LL1.Free = true;
LL1=tf([T1_LL1 1],[T2_LL1 1]);
%%%----------------------------% LL-2--------------------------------------
T3_LL2 = realp('T3_LL2',1); % T3 coefficient
T4_LL2 = realp('T4_LL2',0.1); % T4 coefficient
T3_LL2.Minimum = 0.1; T3_LL2.Maximum = 1; % Set min-max values for T3
T4_LL2.Minimum = 0.01; T4_LL2.Maximum = 0.1; % Set min-max values for T4
T3_LL2.Free = true;
T4_LL2.Free = true;
LL2=tf([T3_LL2 1],[T4_LL2 1]);
%%%--------------------------Washout---------------------------------------
Tw = realp('Tw',1); % Tw coefficient
Tw.Minimum = 1; Tw.Maximum = 10;
Tw.Free = true;
WO=tf([Tw 0],[Tw 1]);
%%%--------------------------Gain------------------------------------------
Ck = realp('Ck',1);
Ck.Minimum = 1; Ck.Maximum = 50;
Kg=tf(Ck);
%%%==========================System tuning=================================
CL0 = feedback(LL1*LL2*Ck*G,1, -1); % Closed-loop TF (with PSS)
CL0.InputName = 'ws';
CL0.OutputName = 'w';
Req1 = TuningGoal.Poles(0,0.2,Inf); % [min decay, min damping ratio, max freq].
options = systuneOptions('Display','iter');
[CL,fSoft] = systune(CL0,Req1, options);
sys2=CL.Blocks;
OptimizedParam=[sys2.T1_LL1 sys2.T2_LL1 sys2.T3_LL2 sys2.T4_LL2 sys2.Ck]; OptimizedParam=double(OptimizedParam);
figure (1)
viewGoal(Req1,CL); xlim([-50 1]); hold on; % Plot the results with the desired goal to check if it is satisfactory
%=================================END======================================
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。




![[动物文学]走红年轻人化身“精神动物”,这届年轻人不想做人了](https://img-blog.csdnimg.cn/da71f56d356b411fbabaa8fada9c88ef.png)