👉事情起因:我想做关于PX4无人机的摄像头仿真,根据PX4的官网文件
Tools/sitl_gazebo文件夹里面有对应的模型可以使用,我就想在mavros_posix_sitl文件里面修改vehicle参数,比如直接将vehicle=“iris_stereo_camera”。然后直接保存运行,直接报错如下,返回值256。
process[gazebo-3]: started with pid [5413] ERROR [px4] Startup script returned with return value: 256
在px4论坛还有官网找到了很多解决办法,发现都有不奏效。最后自己根据报错信息寻找蛛丝马迹,发现其原因在于直接通过veilcle传参无法搜寻到对应的sdf描述文件,所以个人猜想解决办法就是直接对arg="sdf"进行传参
<arg name="sdf" default="$(find mavlink_sitl_gazebo)/models/iris_stereo_camera/iris_stereo_camera.sdf"/>
即可成功运行、
如果出现gazebo报错,直接killall gzserver
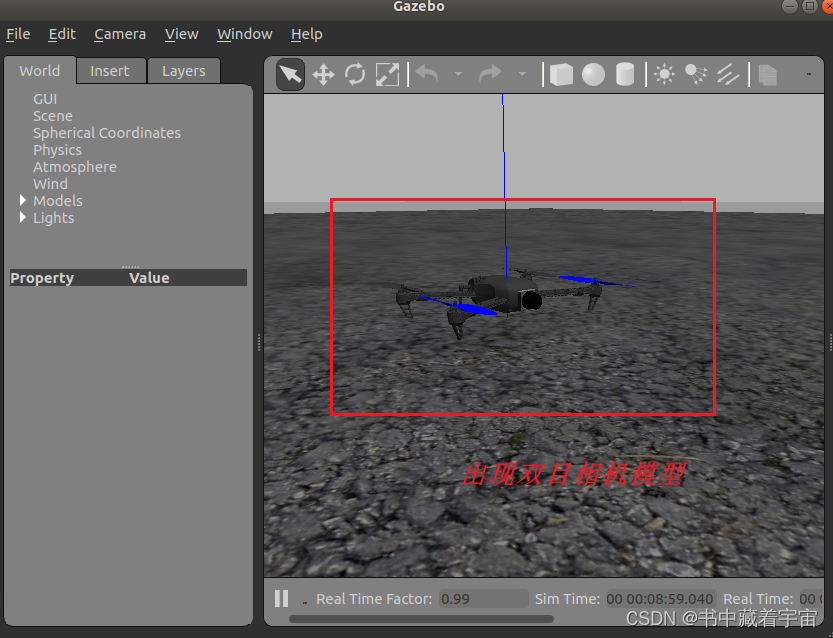
如果想使用其他带摄像头的模型,直接把sdf进行更换即可。