目录索引
- 前言
- 当前安装软件
- 1. OpenCV4.6.0
- 2. Ceres
- 3. ONNXRUNTIME
- 4. Libtorch
- 5. LCM
- 6. Faiss
- 7. OpenGV
- 8. Backward
- 9. libjpeg-turbo
- 参考安装文档
- ldd查看动态链接库
- 库搜索目录
前言
由于之前不小心rm删除了系统目录下/usr/local/lib,难以恢复,于是重新安装了里面的库。这里面的库基本都是有源码安装的包通过sudo make install把库移植到这里的。
当前安装软件
下面总结我的电脑在这个目录下安装的包
1. OpenCV4.6.0
可参照OpenCV3.4.10/4.6.0安装与CMakeLists编写
2. Ceres
# 参照
#Install ceres
git clone https://github.com/HKUST-Swarm/ceres-solver -b D2SLAM && \
cd ceres-solver && \
mkdir build && cd build && \
cmake -DCMAKE_BUILD_TYPE=Release -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF -DBUILD_BENCHMARKS=OFF .. && \
sudo make -j6 install && \
3. ONNXRUNTIME
wget https://github.com/microsoft/onnxruntime/releases/download/v1.12.1/onnxruntime-linux-x64-gpu-1.12.1.tgz && \
tar -zxvf onnxruntime-linux-x64-gpu-1.12.1.tgz && \
sudo cp -r onnxruntime-linux-x64-gpu-1.12.1/include/* /usr/local/include/ && \
sudo cp -r onnxruntime-linux-x64-gpu-1.12.1/lib/* /usr/local/lib/
4. Libtorch
wget https://download.pytorch.org/libtorch/cpu/libtorch-cxx11-abi-shared-with-deps-2.0.1%2Bcpu.zip && \
unzip libtorch-cxx11-abi-shared-with-deps-2.0.1+cpu.zip && \
rm libtorch-cxx11-abi-shared-with-deps-2.0.1+cpu.zip && \
cp -r libtorch/* /usr/local/
5. LCM
git clone https://github.com/lcm-proj/lcm && \
cd lcm && \
git checkout tags/v1.4.0 && \
mkdir build && cd build && \
cmake -DCMAKE_BUILD_TYPE=Release -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF -DBUILD_BENCHMARKS=OFF .. && \
make -j6 install && \
pip install lcm
6. Faiss
git clone https://github.com/facebookresearch/faiss.git && \
cd faiss && git checkout v1.7.4 && \
cmake -B build -DCMAKE_BUILD_TYPE=Release -DFAISS_OPT_LEVEL=avx2 -DFAISS_ENABLE_PYTHON=OFF -DBUILD_TESTING=OFF -DFAISS_ENABLE_GPU=OFF . && \
sudo make -C build -j faiss && \
sudo make -C build install
7. OpenGV
#Install OpenGV
git clone https://github.com/HKUST-Swarm/opengv && \
mkdir opengv/build && cd opengv/build && cmake .. && make && \
sudo make install
8. Backward
#Install Backward
sudo wget https://raw.githubusercontent.com/bombela/backward-cpp/master/backward.hpp -O /usr/local/include/backward.hpp
9. libjpeg-turbo
参考Ubuntu 安装libjpeg-turbo库
参考安装文档
# FROM nvidia/cuda:11.6.1-cudnn8-devel-ubuntu20.04
FROM nvcr.io/nvidia/tensorrt:22.08-py3
ARG CERES_VERSION=2.1.0
ARG CMAKE_VERSION=3.23.1
ARG ONNX_VERSION=1.12.1
ARG OPENCV_VERSION=4.6.0
ENV SWARM_WS=/root/swarm_ws
ARG ROS_VERSION=noetic
ARG FAISS_VERSION=1.7.4
ARG LIBTORCH_VERSION=1.13.0#Some basic dependencies
RUN apt-get -y update && \DEBIAN_FRONTEND=noninteractive TZ=Asia/Beijing apt-get -y install tzdata && \apt-get install -y wget curl lsb-release git \libatlas-base-dev \libeigen3-dev \libgoogle-glog-dev \libsuitesparse-dev \libglib2.0-dev \libyaml-cpp-dev \libdw-dev \vim #Install ROS
# update ros repository
# some code copied from https://github.com/HKUST-Aerial-Robotics/VINS-Fusion/blob/master/docker/Dockerfile
# RUN sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' &&\
RUN sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' && \curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | apt-key add - && \apt-get update && \if [ "x$(nproc)" = "x1" ] ; then export USE_PROC=1 ; \else export USE_PROC=$(($(nproc)/2)) ; fi && \apt-get update && \DEBIAN_FRONTEND=noninteractive apt-get install -y \ros-${ROS_VERSION}-ros-base \ros-${ROS_VERSION}-nav-msgs \ros-${ROS_VERSION}-sensor-msgs \ros-${ROS_VERSION}-cv-bridge \ros-${ROS_VERSION}-rviz \ros-${ROS_VERSION}-pcl-ros \ros-${ROS_VERSION}-image-transport-plugins \python3-rosdep \python3-rosinstall \python3-rosinstall-generator \python3-wstool \build-essential \python3-rosdep \ros-${ROS_VERSION}-catkin \net-tools \python3-catkin-tools \htop \xterm \gdb && \rosdep init && \rosdep update#Replace CMAKE
RUN rm /usr/bin/cmake && \wget https://github.com/Kitware/CMake/releases/download/v${CMAKE_VERSION}/cmake-${CMAKE_VERSION}-Linux-x86_64.sh \-q -O /tmp/cmake-install.sh \&& chmod u+x /tmp/cmake-install.sh \&& /tmp/cmake-install.sh --skip-license --prefix=/usr/ \&& rm /tmp/cmake-install.sh \&& cmake --version#Install ceres
RUN git clone https://github.com/HKUST-Swarm/ceres-solver -b D2SLAM && \cd ceres-solver && \mkdir build && cd build && \cmake -DCMAKE_BUILD_TYPE=Release -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF -DBUILD_BENCHMARKS=OFF .. && \make -j$(USE_PROC) install && \rm -rf ../../ceres-solver && \apt-get clean allRUN wget https://github.com/microsoft/onnxruntime/releases/download/v${ONNX_VERSION}/onnxruntime-linux-x64-gpu-${ONNX_VERSION}.tgz && \tar -zxvf onnxruntime-linux-x64-gpu-${ONNX_VERSION}.tgz && \cp -r onnxruntime-linux-x64-gpu-${ONNX_VERSION}/include/* /usr/local/include/ && \cp -r onnxruntime-linux-x64-gpu-${ONNX_VERSION}/lib/* /usr/local/lib/ && \rm -rf onnxruntime-linux-x64-gpu-${ONNX_VERSION} && \rm onnxruntime-linux-x64-gpu-${ONNX_VERSION}.tgz#Install Libtorch (CUDA)
# RUN wget https://download.pytorch.org/libtorch/cpu/libtorch-shared-with-deps-${LIBTORCH_VERSION}%2Bcpu.zip && \
# unzip libtorch-shared-with-deps-${LIBTORCH_VERSION}+cpu.zip && \
# rm libtorch-shared-with-deps-${LIBTORCH_VERSION}+cpu.zip && \
# cp -r libtorch/* /usr/local/RUN wget https://download.pytorch.org/libtorch/cpu/libtorch-cxx11-abi-shared-with-deps-2.0.1%2Bcpu.zip && \unzip libtorch-cxx11-abi-shared-with-deps-2.0.1+cpu.zip && \rm libtorch-cxx11-abi-shared-with-deps-2.0.1+cpu.zip && \cp -r libtorch/* /usr/local/#Install LCM
RUN git clone https://github.com/lcm-proj/lcm && \cd lcm && \git checkout tags/v1.4.0 && \mkdir build && cd build && \cmake -DCMAKE_BUILD_TYPE=Release -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF -DBUILD_BENCHMARKS=OFF .. && \make -j$(USE_PROC) install && \pip install lcm#Install Faiss
RUN git clone https://github.com/facebookresearch/faiss.git && \cd faiss && git checkout tags/v${FAISS_VERSION} && \cmake -B build -DCMAKE_BUILD_TYPE=Release -DFAISS_OPT_LEVEL=avx2 -DFAISS_ENABLE_PYTHON=OFF -DBUILD_TESTING=OFF -DFAISS_ENABLE_GPU=OFF . && \make -C build -j faiss && \make -C build install && \rm -rf ../faiss#Install OpenCV4 with CUDA
RUN apt update && \apt install libgtk2.0-dev -y && \wget https://github.com/opencv/opencv/archive/${OPENCV_VERSION}.zip -O opencv.zip && \unzip opencv.zip && \rm opencv.zip && \git clone https://github.com/opencv/opencv_contrib.git -b ${OPENCV_VERSION}
RUN cd opencv-${OPENCV_VERSION} && \mkdir build && cd build && \cmake .. \-D CMAKE_BUILD_TYPE=RELEASE \-D CMAKE_INSTALL_PREFIX=/usr/local \-D WITH_CUDA=ON \-D WITH_CUDNN=ON \-D WITH_CUBLAS=ON \-D WITH_TBB=ON \-D OPENCV_DNN_CUDA=ON \-D OPENCV_ENABLE_NONFREE=ON \-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib/modules \-D BUILD_EXAMPLES=OFF \-D BUILD_opencv_java=OFF \-D BUILD_opencv_python=OFF \-D BUILD_TESTS=OFF \-D BUILD_PERF_TESTS=OFF \-D BUILD_opencv_apps=OFF \-D BUILD_LIST=calib3d,features2d,highgui,dnn,imgproc,imgcodecs,\
cudev,cudaoptflow,cudaimgproc,cudalegacy,cudaarithm,cudacodec,cudastereo,\
cudafeatures2d,xfeatures2d,tracking,stereo,\
aruco,videoio,ccalib && \make -j $(USE_PROC) && \make install #Install OpenGV
RUN git clone https://github.com/HKUST-Swarm/opengv && \mkdir opengv/build && cd opengv/build && cmake .. && make && \make install#Install Backward
RUN wget https://raw.githubusercontent.com/bombela/backward-cpp/master/backward.hpp -O /usr/local/include/backward.hpp#Install Vulkan
RUN wget -qO - https://packages.lunarg.com/lunarg-signing-key-pub.asc | sudo apt-key add - && \wget -qO /etc/apt/sources.list.d/lunarg-vulkan-1.3.231-focal.list https://packages.lunarg.com/vulkan/1.3.231/lunarg-vulkan-1.3.231-focal.list && \apt update && \apt install vulkan-sdk -y#Install taichi
RUN pip install taichi transformations numpy lcm matplotlib scipy && apt install ros-${ROS_VERSION}-ros-numpy#Build D2SLAM
RUN mkdir -p ${SWARM_WS}/src/ && \cd ${SWARM_WS}/src/ && \git clone https://github.com/HKUST-Swarm/swarm_msgs.git -b D2SLAM && \git clone https://github.com/HKUST-Swarm/sync_bag_player.git && \git clone https://github.com/ros-perception/vision_opencv.git -b ${ROS_VERSION}
COPY ./ ${SWARM_WS}/src/D2SLAM
WORKDIR $SWARM_WS
RUN source "/opt/ros/${ROS_VERSION}/setup.bash" && \catkin config -DCMAKE_BUILD_TYPE=Release \--cmake-args -DONNXRUNTIME_LIB_DIR=/usr/local/lib \-DONNXRUNTIME_INC_DIR=/usr/local/include && \catkin build
ldd查看动态链接库
举例要看libcompressed_image_transport.so或者二进制可执行文件所依赖的动态链接库,就这样找。发现缺少libturbojpeg.so.0然后我们就得知需要安装这个库。
注意:所有的库都是依次按序链接,A需要链接B生成,B需要链接C生成。
那么ldd A,就会把B和C都列出来,如果发现not found,可能是A自身直接需要的库缺失,也可能是B需要的库缺失,同样会导致A的所需要的库也not found
ldd /home/zph/tools_ws/devel/lib/libcompressed_image_transport.solinux-vdso.so.1 (0x00007ffef7c8d000)libcv_bridge.so => /home/zph/tools_ws/devel/lib/libcv_bridge.so (0x00007f3ba8477000)libopencv_core.so.406 => /usr/local/lib/libopencv_core.so.406 (0x00007f3ba6679000)libopencv_imgproc.so.406 => /usr/local/lib/libopencv_imgproc.so.406 (0x00007f3ba48ec000)libopencv_imgcodecs.so.406 => /usr/local/lib/libopencv_imgcodecs.so.406 (0x00007f3ba4523000)libconsole_bridge.so.0.4 => /usr/lib/x86_64-linux-gnu/libconsole_bridge.so.0.4 (0x00007f3ba2e5e000)libturbojpeg.so.0 => not foundlibstdc++.so.6 => /usr/lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f3ba2ad5000)
库搜索目录
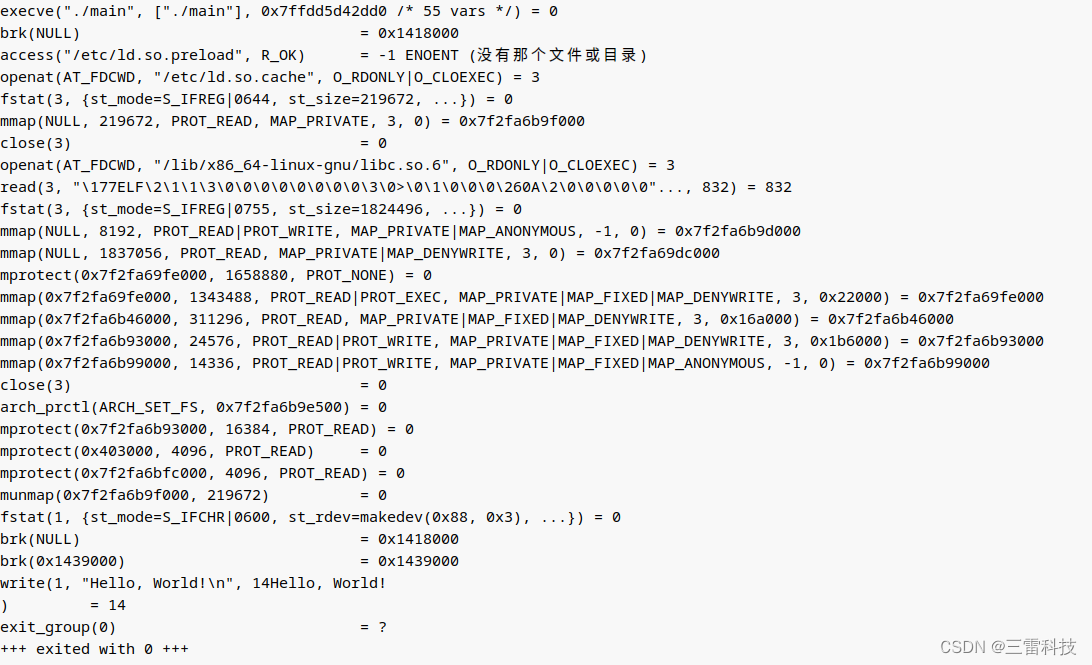
cd /etc/ld.so.conf.d #这个里面存放的是库搜索路径
sudo nano opencv.conf # 可以编辑路径
sudo ldconfig # 这样可以更新 /etc/ld.so.cache缓存文件
# 每次加载系统会直接使用/etc/ld.so.cache定义的动态库