一、前言
由于 Jetson 系列开发板常作为自主无人机的机载电脑,而无人机硬件平台如 PX4 和 ArduPilot 等通过 MAVLink 进行发布无人机状态和位姿等信息,要实现机载电脑与 MAVLink 的通信,必须借助 Mavros 功能包,因此,本文主要介绍 Mavros 功能包的安装、配置与使用,主要参考
GitHub - mavlink/mavros at master
https://github.com/mavlink/mavros/blob/master/mavros/README.md#installation
Ubuntu 安装并配置 mavros (USB 连接)_ubuntu安装mavros-CSDN博客
官方给出了直接安装和源码安装两种方法,由于一般 mavros 安装并配置完成后不会轻易改动,且十分常用,因此比较推荐直接安装方法,本文也只介绍直接安装方法
二、Mavros 的安装
由于 Jetson Orin NX 的 JetPack 5.1.2 对应的是 Ubuntu 20.04,因此我们选择安装 noetic 版本的 mavros 功能包,终端输入
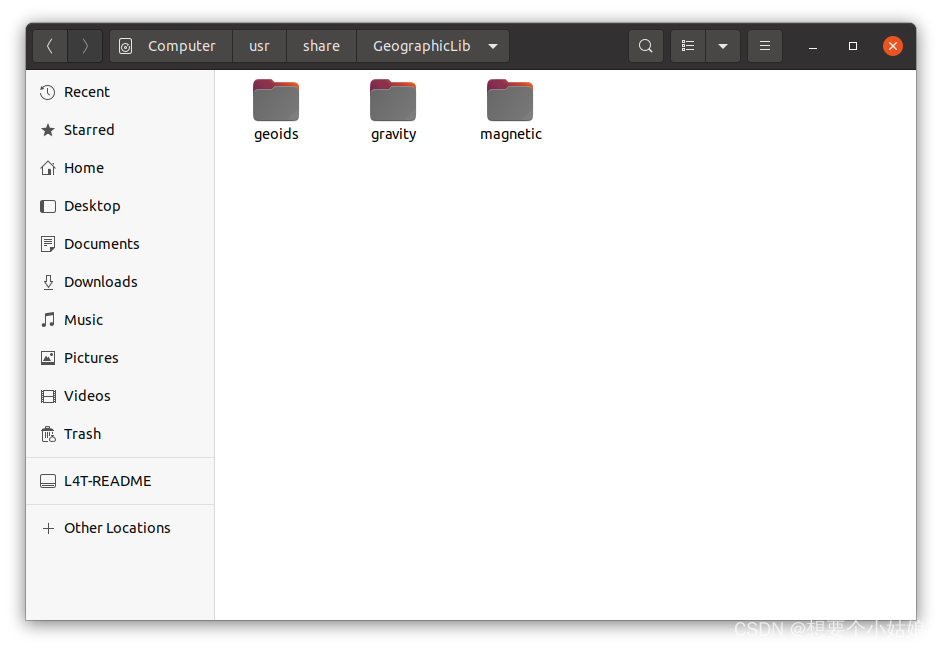
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras -y此时可以查看 /usr/share/ 下多了一个 GeographicLib 文件夹,其内容是空的,需要我们自己添加进去

进入 ~/Documents/ 目录,下载脚本文件
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh然后给下载好的脚本文件添加可执行权限,
sudo chmod +x ./install_geographiclib_datasets.sh运行该脚本下载所需文件
sudo ./install_geographiclib_datasets.sh如果执行报错,就直接去GeographicLib 官网下载(可能要挂梯子。。。)对应的三个包,下载得到三个文件夹:
1.GeographicLib geoids egm96-5 官网下载链接:
Download egm96-5.tar.bz2 (GeographicLib)
2.GeographicLib gravity egm 96官网下载链接
Download egm96.zip (GeographicLib)
3.GeographicLib magnetic emm2015 官网下载链接:
Download emm2015.zip (GeographicLib)
在 /usr/share/GeographicLib/ 路径下,将上面下载的三个压缩包解压后放在这个文件夹内,如下所示
至此,mavros 就安装成功了!
三、Mavrso 的运行
由于 Jetson Orin NX 与飞控(飞行控制器)一般有两种通信连接方式,一种是通过 USB 连接,另一种是通过串口连接,本节将分别介绍两种连接方式使得 Jetson Orin NX 通过 Mavros 实现与飞控的通信
由于是下最新的 Pixhawk 系列飞控为 Pixhawk 6X 和 Pixhawk 6X Mini,因此本文主要介绍 Jetson Orin NX 与 Pixhawk 6X Mini 的通信,其他电脑与飞控的连接方式也是相同的!