目录
- 一、开环控制
- 1.1、控制原理
- 1.2、硬件接线
- 1.3、代码说明
- 1.4、程序演示
- 1.5、程序架构的体现
- 二、电流变换
- 2.1、理论说明
- 2.2、代码说明
ODrive、VESC和SimpleFOC 教程链接汇总:请点击
一、开环控制
在SimpleFOC系列中有开环控制的教程,SimpleFOC移植STM32(二)—— 开环控制,可以对比参考。
1.1、控制原理

1、开环控制,只能使用电压模式,电流模式需要采样电流,那就是闭环了,
2、一般设置Ud=0,所以只需设置Uq。在SimpleFOC中 voltage_limit最终赋值Uq,在ODrive中 target_voltage_最终赋值Uq,
3、Uq设置太大,电机发热严重,Uq设置太小,电机没劲转不动或者转不快,所以一定要根据电机相电阻设置大小,
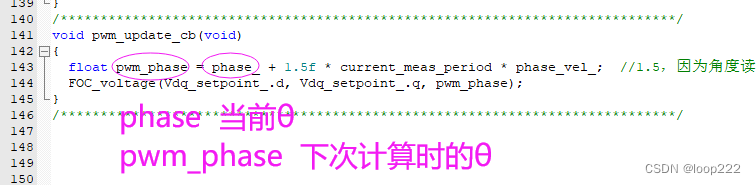
4、θ不是当前的角度,是目标角度,就是下次计算时的角度。
1.2、硬件接线

驱动板购买链接:某宝购买
电机 购买链接:某宝购买
1.3、代码说明
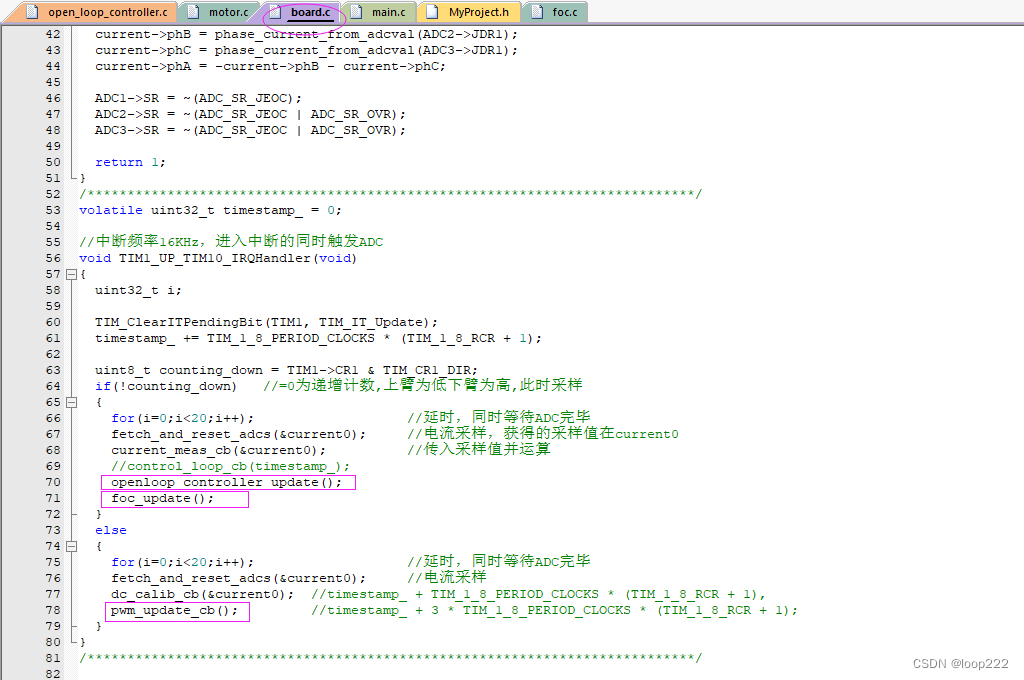
1、开环控制在TIM1更新中断中调用,下图:

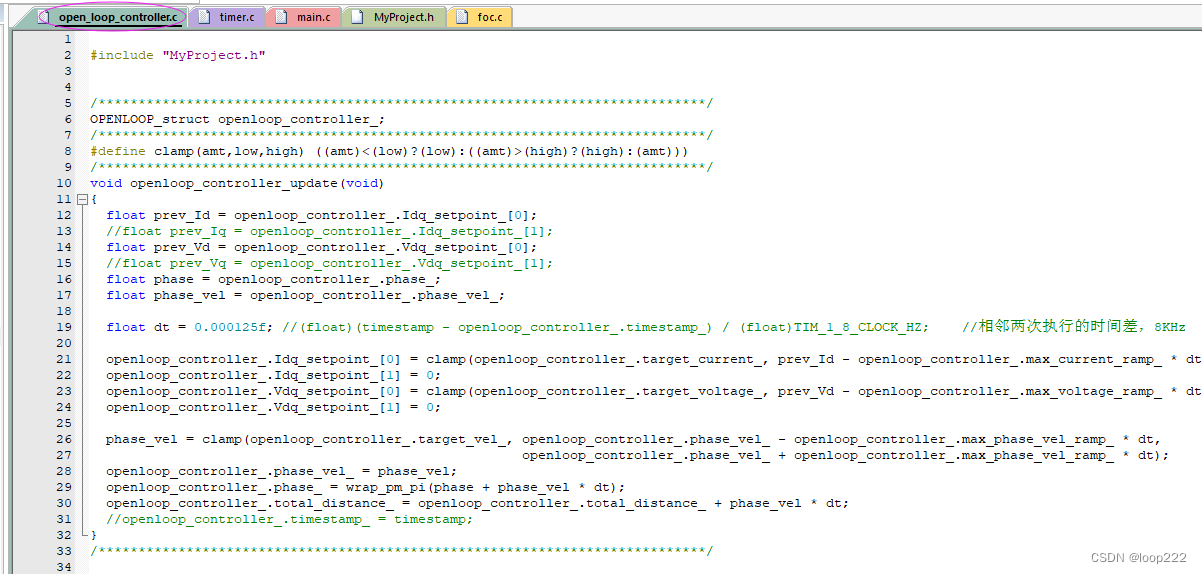
2、开环控制代码,下图:
相比simpleFOC的开环运算,增加电流、电压和速度的爬升率设置,启停阶段电机转动更平稳,
3、Park逆变换,
由dq变为αβ,最终送入SVPWM,

1.4、程序演示
注意,本节示例中的速度单位是电角度(rad/s),不是闭环控制中的速度单位(圈/秒),也不是SimpleFOC中的机械角度(rad/s)。

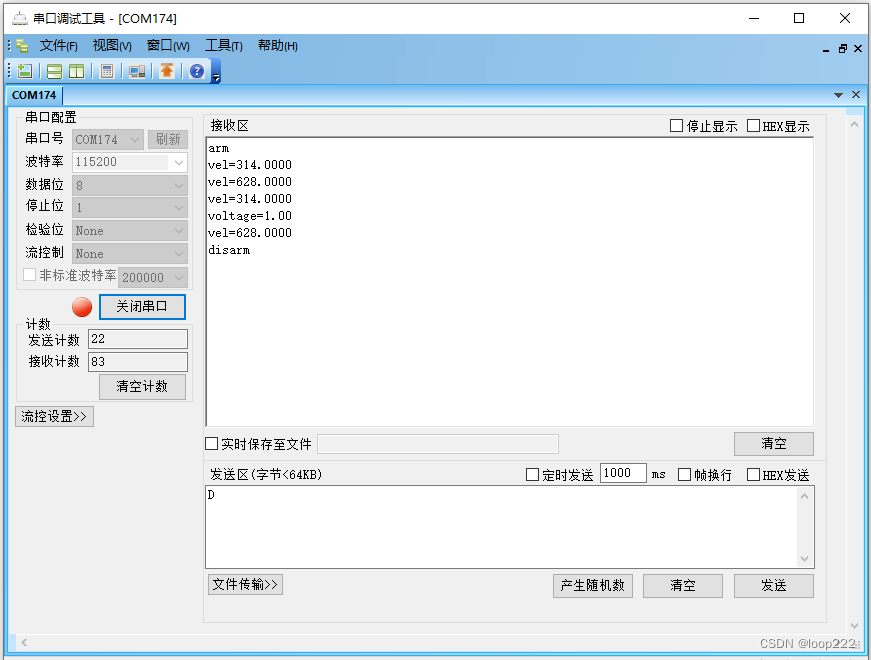
如果转速设置太大,电机会振动,可以调高 target_voltage_ 以达到更大的转速,但是注意电机电流,注意发热。
- 电压爬升率和速度爬升率如果设置的小一点,可以看到电机逐渐加速的过程,
- 云台电机的target_voltage_设置可以更大一点,能更清楚的看到扭矩逐渐增大的过程,
- 开环控制虽然简单,却是入门第一关,
- 对于电机新手,可以先用云台电机,因为电机相电阻更大,不容易烧坏,
- 开环控制主要用于电机上电校准和无刷电机的启动阶段,不是控制常态,不用深入研究。
1.5、程序架构的体现
ODrive代码开源但却难以看懂,我觉得原因有以下几个:
- 1、采用FreeRTOS系统,没用大家习惯的裸奔,
- 2、C++编程,单片机代码C是主流,即使有嵌入式工程师善长C++,但却不懂硬件,代码看起来一样云里雾里,
- 3、程序架构与众不同。
ODrive的程序架构,也是我在基本移植完代码后才焕然大悟的,如果事先有架构意识,不至于看代码的时候那么痛苦。
下面以开环控制为例,说明其架构特点,
- openloop_controller_update()函数运算后的变量赋给FOC_voltage()函数,这是常用的代码写作方式,下图:

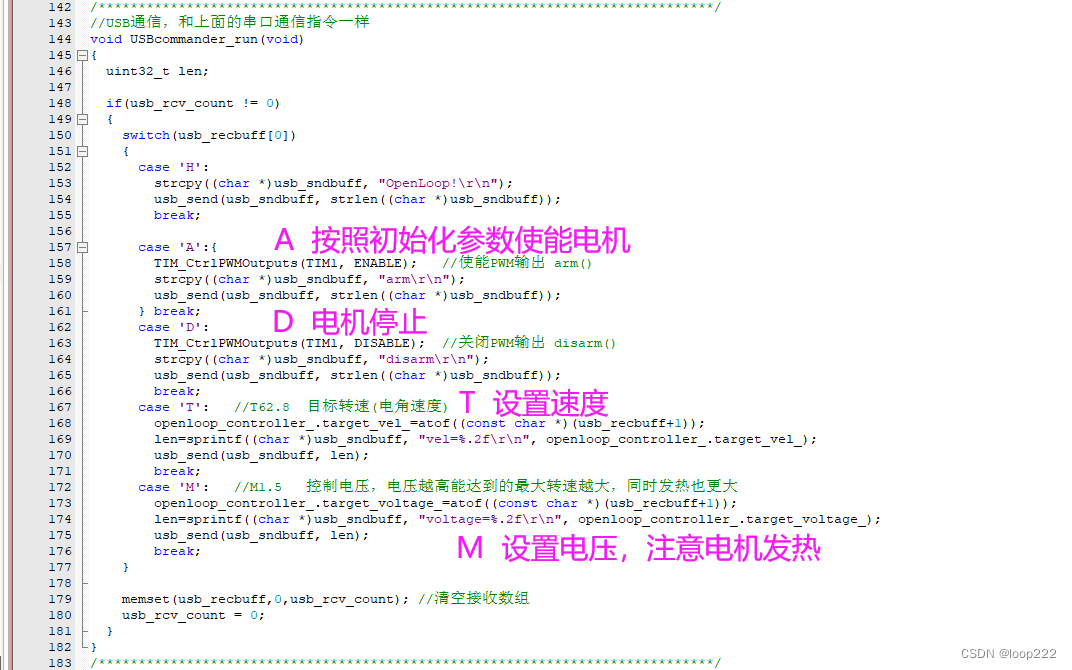
- 为了说明程序架构,我又做了一个开环控制代码,

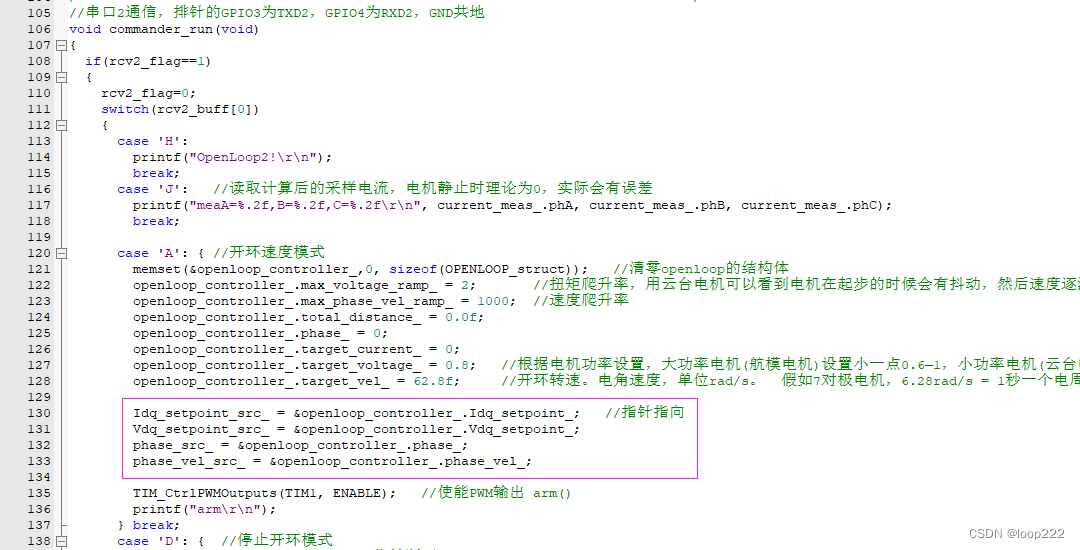
- 第二个代码,仿照官方架构,openloop_controller_update()函数运算后的变量没有直接赋给FOC_voltage()函数,下图:
而是在准备开环控制的时候,指针指向开环变量,下图:
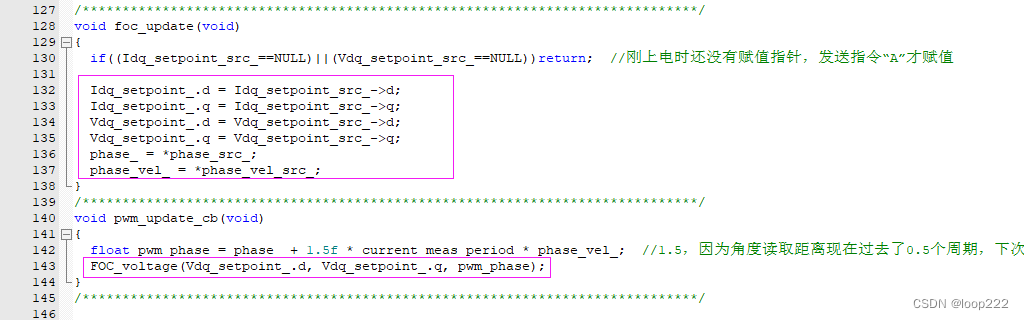
然后再将指针传递给FOC_voltage()函数的变量,下图:
总结来说:
- 第一个代码中,openloop_controller_update()函数变量给FOC_voltage()函数用,整个代码只有一套变量,
- 第二个代码中,openloop_controller_update()函数有自己的变量,FOC_voltage()也有自己的变量,两个变量通过指针链接。
相当于多了一个二传手,这样做肯定降低了效率,甚至觉得完全就是多此一举,但为什么要这么做,大概是方便功能拓展和多人合作。我觉得这个差别有点像个体户和大型跨国公司,个体户理解不了ERP系统一样。
最初移植代码的时候我是打算采用第一种方案的,但是考虑到代码移植后大家的认可度,我还是决定和官方的保持一致。
文笔有限,还不懂的请认真对比两个代码。
二、电流变换
电流变换实际上要到第七篇教程编码器校准时才会涉及到,此处提前讲解,以满足你们那渴望的心,
2.1、理论说明
1、几乎所有讲FOC的文章,都会有这样的框图,所以此处不再多讲。
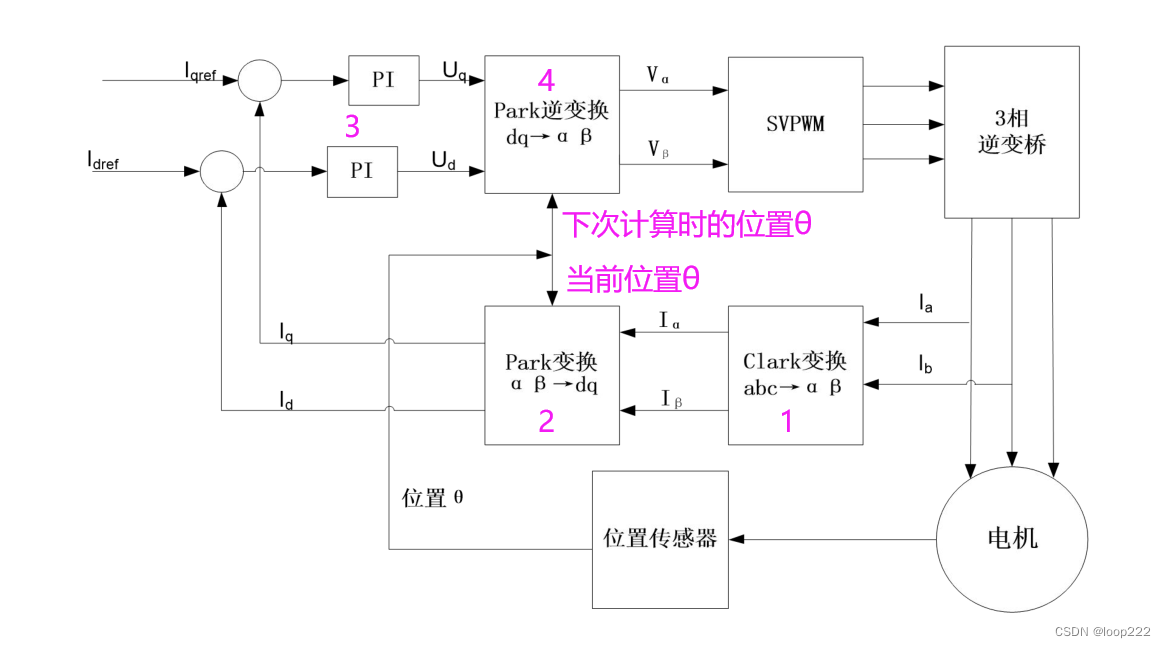
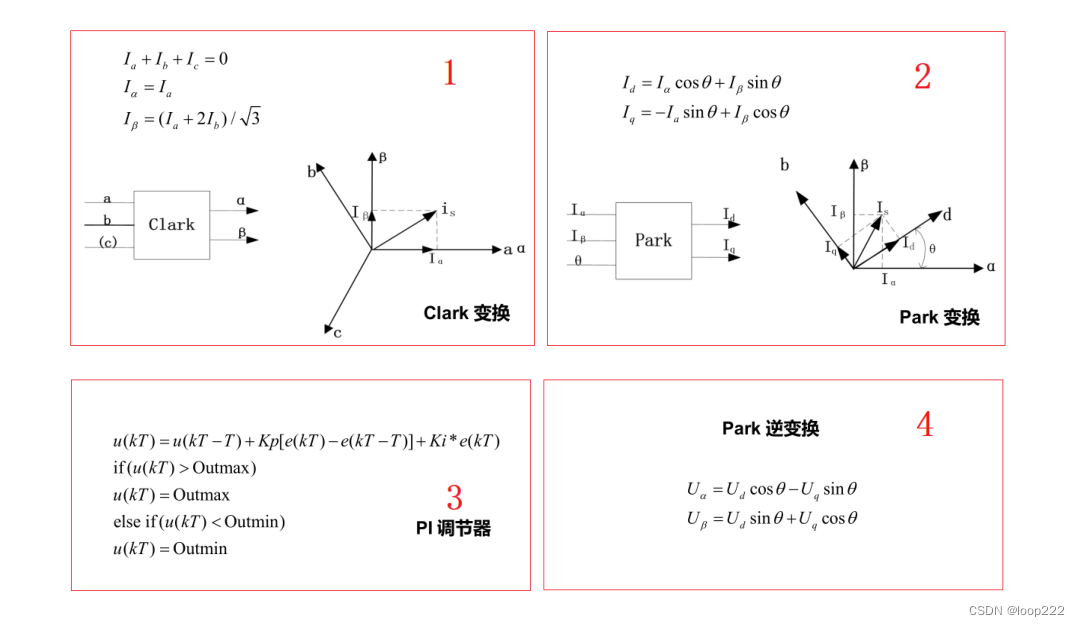
2、重点:“θ”这个参数,框图中看起来像是一个参数两处调用,实际上这是两个角度,
Park变换的θ是当前读出的角度,而Park逆变换是下次FOC计算时的角度(当前角度+估算的下次转过的角度),
- 在simpleFOC中,没有估算下次转过的角度,只是简单的加了_PI_2,我觉得这也是限制了SimpleFOC最大转速的一个原因,因为转速足够快的话,一个电周期完全有可能转过_PI_2个电角度。

- 在ODrive中则经过了精确的计算,
2.2、代码说明
- 电流变换部分移植v0.5.1,因为v0.5.6的变换被分开写入了多个不同的函数,没有0.5.1的简单清晰,
- 本节只为方便观看代码,稍后代码中的变换仍采用v0.5.6版本,
- 0.5.1和0.5.6都是好代码,版本升级只能说明创作者有不同的目标,并不是代码就一定越来越好。


- ODrive的力矩模式非常稳定,对比SimpleFOC的电流环就非常拉垮,几乎没有实用价值。
- 我试图把ODrive的电流环移植到SimpleFOC中,但是移植了一些后就写不下去了,因为涉及到了程序架构。SimpleFOC是Arduino环境,设计的目标是跨平台运行,几乎不用中断,代码是流水线式的执行,强行移植就不再是SimpleFOC了。
(完)