文章目录
- Pytorch深度学习
- 1. Pytorch加载数据初认识
- 2. TensorBoard
- 3. Transforms
- 常见的transform
- 4. torchvision中的数据集使用
- 5. DataLoader使用
- 6. 神经网络
- 6.1 神经网络的基本骨架
- 6.2 卷积层
- 6.3 最大池化的使用
- 6.4 非线性激活
- 6.5 线性层及其他层
- 6.6 小实战及Sequential
- 7. 损失函数与反向传播
- 8. 优化器
- 9. 现有网络模型的使用
- 10. 网络模型的保存与读取
- 11. 完整的模型训练套路
- 12. 利用GPU训练
- 13. 完整的模型验证套路
Pytorch深度学习

dir():打开,看见包含什么
help():说明书
import torch
print(dir(torch))
# ['AVG', 'AggregationType', 'AliasDb', ...]print(dir(torch.tensor))
# ['__call__', '__class__', '__delattr__', '__dir__', '__doc__',...]
1. Pytorch加载数据初认识
pytorch中读取数据主要涉及到两个类Dataset和Dataloader。
Dataset可以将可以使用的数据提取出来,并且可以对数据完成编号。即提供一种方式获取数据及其对应真实的label值。
Dataloader为网络提供不同的数据形式。
Dataset
Dataset是一个抽象类。所有数据集都应该继承Dataset,所有子类都应该重写__getitem__方法,该方法获取每个数据及其对应的label。我们可以选择重写Dataset的__len__方法
-
如何获取每一个数据及其label
-
告诉我们总共有多少数据
下载数据集hymenoptera_data。
Dataset测试
from torch.utils.data import Dataset
from PIL import Image
import os# 创建MyData类,继承Dataset Dataset是一个抽象类
# 所有数据集都应该继承Dataset,所有子类都应该重写__getitem__方法,该方法获取每个数据及其对应的label
# 我们可以选择重写Dataset的__len__方法
class MyData(Dataset):def __init__(self,root_dir,label_dir):self.root_dir = root_dirself.label_dir = label_dirself.path = os.path.join(self.root_dir,self.label_dir)self.image_path_list = os.listdir(self.path)# 获取单个图片信息def __getitem__(self, index):img_name = self.image_path_list[index]img_item_path = os.path.join(self.root_dir,self.label_dir,img_name)# 读取图片img = Image.open(img_item_path)label = self.label_dirreturn img,label# 获取数据集长度def __len__(self):return len(self.image_path_list )if __name__ == '__main__':ants_dataset_train = MyData("data/hymenoptera_data/train","ants")ants_dataset_train_len = ants_dataset_train.__len__()print(ants_dataset_train_len)# 124bees_dataset_train = MyData("data/hymenoptera_data/train", "bees")bees_dataset_train_len = bees_dataset_train.__len__()print(bees_dataset_train_len)# 121train_dataset = ants_dataset_train + bees_dataset_trainprint(train_dataset.__len__())# 245img, label = train_dataset.__getitem__(12)img.show() # 展示图片print(label)# ants
2. TensorBoard
TensorBoard是一个可视化的模块,该模块功能强大,可用于深度学习网络模型训练查看模型结构和训练效果(预测结果、网络模型结构图、准确率、loss曲线、学习率、权重分布等),可以帮我们更好的了解网络模型,设计TensorBoard调用相关代码,以上结果即可保存,是整合资料、梳理模型的好帮手。
安装TensorBoard
pip install tensorboard
首先要导入SummaryWriterl类,直接向log_dir文件夹写入事件文件,可以被Tensorboard进行解析。
add_scalar()方法
'''
参数:- tag:相当于title标题- scalar_value:需要保存的数值,对应y轴- global_step:步数,对应x轴
'''
writer.add_scalar()
测试add_scalar()
from torch.utils.tensorboard import SummaryWriterwriter = SummaryWriter("logs") # 指定一个文件夹,存储事件文件# 添加标量到summary
'''
参数:- tag:相当于title标题- scalar_value:需要保存的数值,对应y轴- global_step:步数,对应x轴
'''
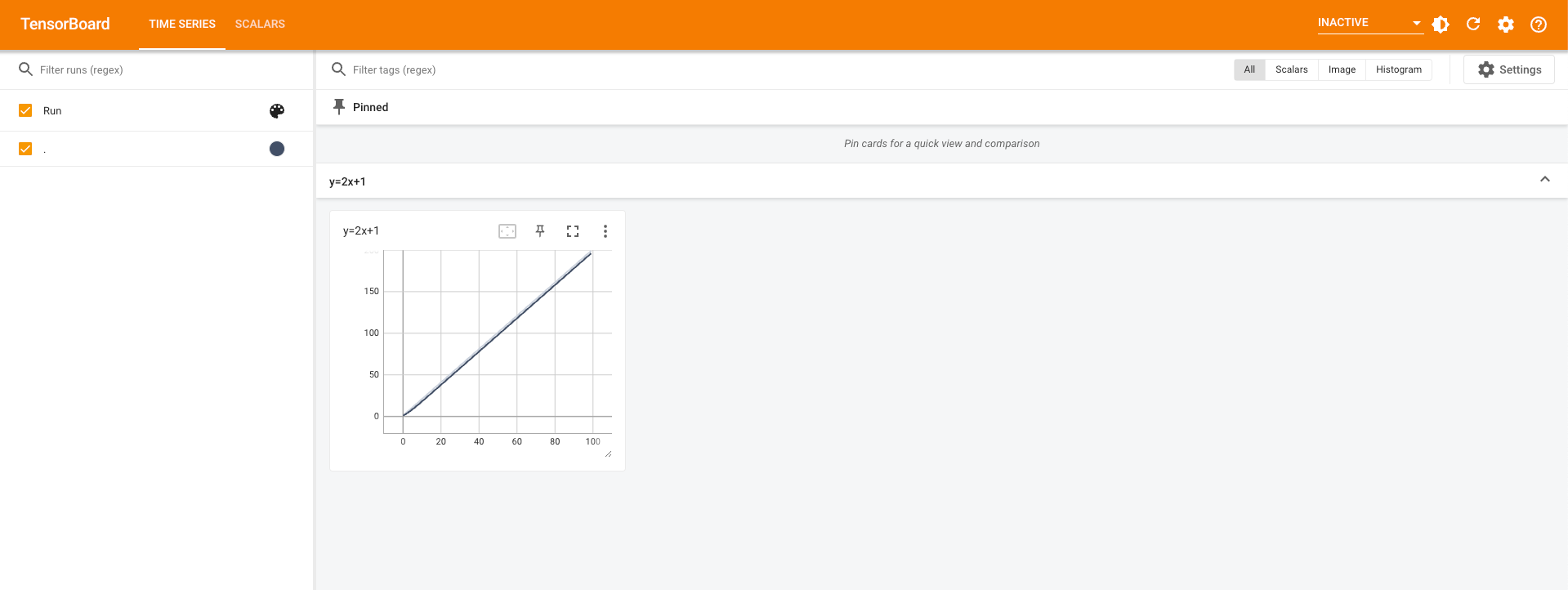
for i in range(100):writer.add_scalar(tag="y=2x+1",scalar_value=2*i+1,global_step=i)writer.close()
打开生成的文件。在pycharm控制台窗口中,切换到项目目录下,使用命令
tensorboard --logdir=事件文件夹名称如:
tensorboard --logdir=logs使用命令,指定端口tensorboard --logdir=logs --port=端口号

点击链接,打开网页查看结果。
add_image()方法
'''
参数:- tag:标题title- image_tensor:图像类型 torch.Tensor、numpy.array、string/blobname- global_step:步数
'''
writer.add_image()
测试add_image()
因为图片接收的数据为tensor或者numpy型,所以这里我们使用numpy型。
利用numpy.array(),对PIL图片进行转换
from torch.utils.tensorboard import SummaryWriter
from PIL import Image
import numpy as npwriter = SummaryWriter("logs")img_path = "data/练手数据集/train/ants_image/0013035.jpg"# Image读入图片
image_PIL = Image.open(img_path)
img_array = np.array(image_PIL)# 添加图片
'''
参数:- tag:标题title- image_tensor:图像类型 torch.Tensor、numpy.array、string/blobname- global_step:步数- dataformats:指定img_tensor值的格式
'''
writer.add_image(tag="Test",img_tensor=img_array,global_step=1,dataformats="HWC")
writer.close()
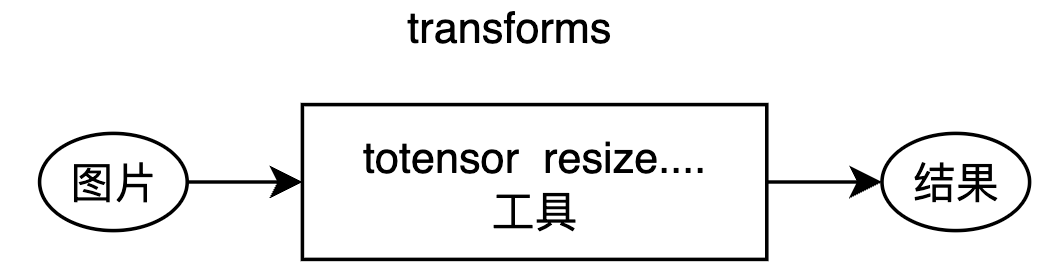
3. Transforms
Transforms是pytorch的图像处理工具包,是torchvision模块下的一个一个类的集合,可以对图像或数据进行格式变换,裁剪,缩放,旋转等,在进行深度学习项目时用途很广泛。
ToTensor
from torchvision import transforms
from PIL import Imageimage_path = "data/hymenoptera_data/train/ants/0013035.jpg"
image_PIL = Image.open(image_path)
# 示例话tensor对象
to_tensor = transforms.ToTensor()
# 调用__call__方法 实现PIL图片对象转为tensor图片对象
image_tensor = to_tensor(image_PIL)
print(image_tensor)'''
tensor([[[0.3137, 0.3137, 0.3137, ..., 0.3176, 0.3098, 0.2980],[0.3176, 0.3176, 0.3176, ..., 0.3176, 0.3098, 0.2980],[0.3216, 0.3216, 0.3216, ..., 0.3137, 0.3098, 0.3020],...,[0.3412, 0.3412, 0.3373, ..., 0.1725, 0.3725, 0.3529],[0.3412, 0.3412, 0.3373, ..., 0.3294, 0.3529, 0.3294],[0.3412, 0.3412, 0.3373, ..., 0.3098, 0.3059, 0.3294]],...]]])
'''
常见的transform
关注三个点:输入、输出、作用。
Compose
把几个transforms结合在一起,按顺序执行。Compose()中的参数需要是一个列表。如:
Compose([transforms参数1,transforms参数2,...])
ToPILImage
将tensor或numpy数据类型转为PIL Image类型。
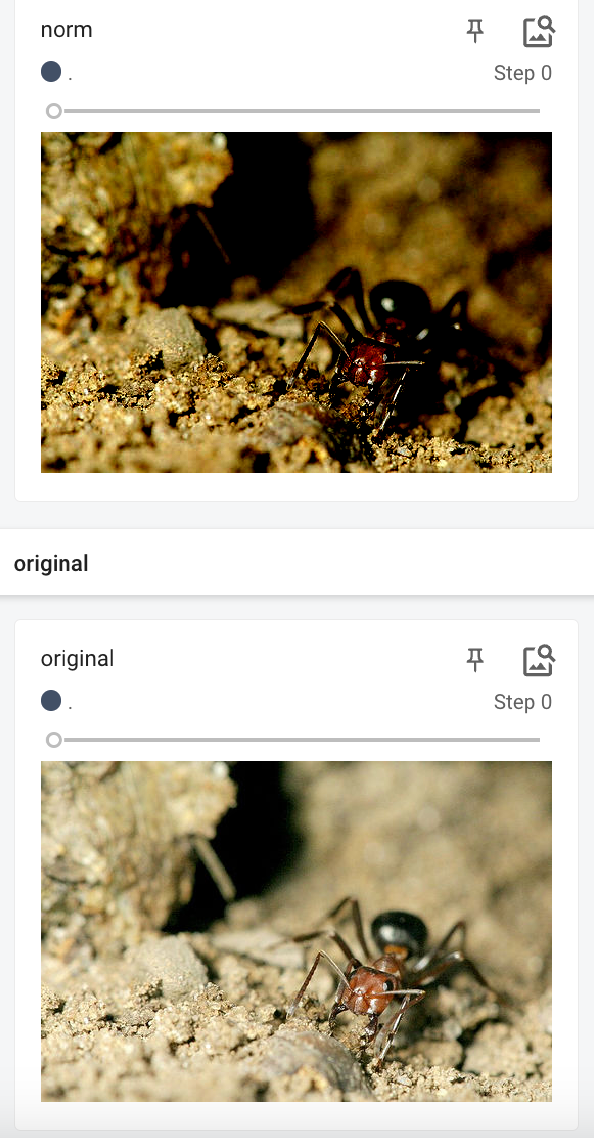
Normalize
归一化。用平均值和标准差对tensor image进行归一化。
归一化计算方式:
output[channel] = (input[channel] - mean[channel]) / std[channel]
测试:
from torchvision import transforms
from PIL import Image
from torch.utils.tensorboard import SummaryWriter# PIL读取图片
img_PIL = Image.open("data/hymenoptera_data/train/ants/9715481_b3cb4114ff.jpg")# 将PIL图片转为tensor
to_tensor = transforms.ToTensor()
img_tensor = to_tensor(img_PIL)# 进行归一化
n = transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])
img_norm = n(img_tensor)writer = SummaryWriter("logs")
writer.add_image(img_tensor=img_tensor,tag="original",global_step=0)
writer.add_image(img_tensor=img_norm,tag="norm",global_step=0)
writer.close()
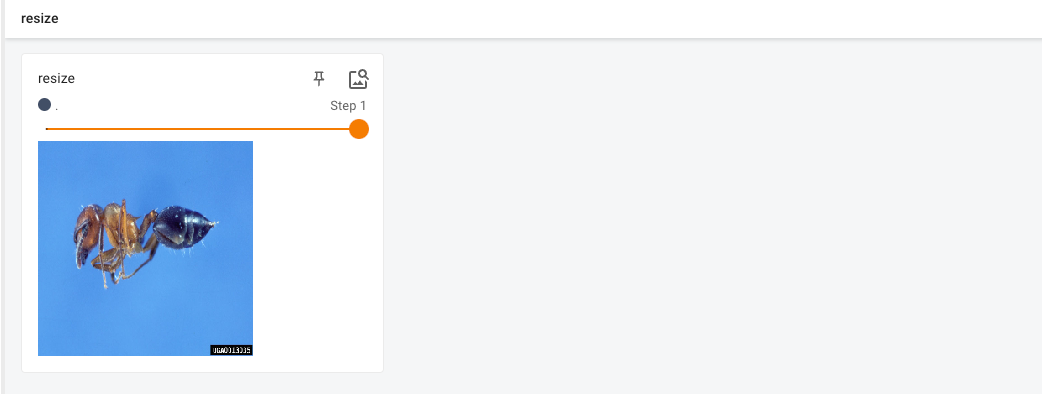
Resize
将PIL Image重置大小为给定的尺寸。如果size只给了一个数,则我们原图最小的边才会匹配该数值,进行等比的缩放。
测试:
from torchvision import transforms
from PIL import Image
from torch.utils.tensorboard import SummaryWritertotensor = transforms.ToTensor()
writer = SummaryWriter("logs")image_PIL = Image.open("data/hymenoptera_data/train/ants/0013035.jpg")
image_tensor_0 = totensor(image_PIL)
writer.add_image(tag="resize",global_step=0,img_tensor=image_tensor_0)# 定义重置大小
resize = transforms.Resize((512,512))
image_resize = resize(image_PIL)
image_tensor_1 = totensor(image_resize)
writer.add_image(tag="resize",global_step=1,img_tensor=image_tensor_1)writer.close()
RandomCrop
随机裁剪。
RandomCrop()
'''
参数:- size:给定高和宽或只给定一个数值(裁剪为正方形)。
'''
测试:
from torchvision import transforms
from PIL import Image
from torch.utils.tensorboard import SummaryWriterimage_PIL = Image.open("data/hymenoptera_data/train/ants/20935278_9190345f6b.jpg")to_tensor = transforms.ToTensor()# 定义裁剪
trans_random = transforms.RandomCrop(256)
trans_compose = transforms.Compose([to_tensor,trans_random])writer = SummaryWriter("logs")for i in range(10):random_img = trans_compose(image_PIL)writer.add_image(tag="random",img_tensor=random_img,global_step=i)writer.close()
4. torchvision中的数据集使用
数据集:
CelebA、CIFAR、Cityscapes、COCO、DatasetFolder、EMNIST、FakeData、Fashion-MNIST、Flickr、HMDB51、ImageFolder、ImageNet、Kinetics-400、KMNIST、LSUN、MNIST、Omniglot、PhotoTour、Places365、QMNIST、SBD、SBU、STL10、SVHN、UCF101、USPS、VOC
需要设定参数:
-
root:数据集的存放位置
-
train:数据集是否为训练集
-
transform: 要对数据集进行什么变化
-
target_transform:对target进行变换
-
download:是否自动下载数据集
测试:
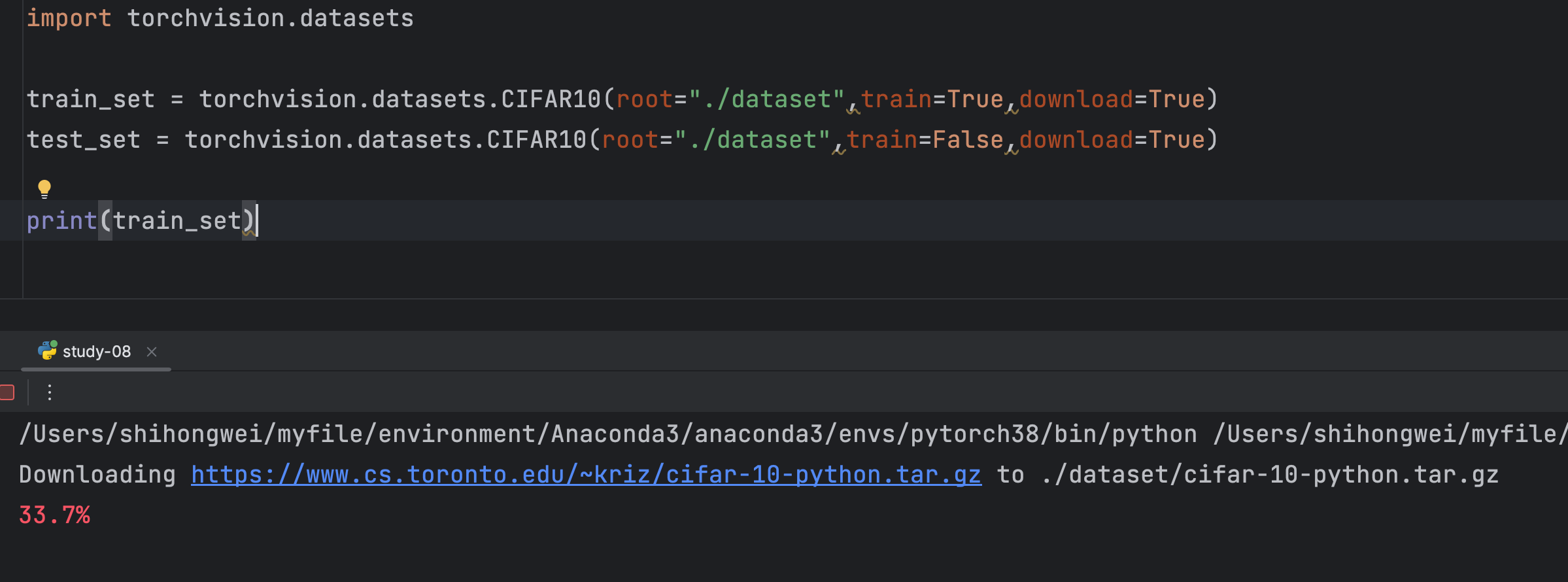
import torchvision.datasetstrain_set = torchvision.datasets.CIFAR10(root="./dataset",train=True,download=True)
test_set = torchvision.datasets.CIFAR10(root="./dataset",train=False,download=True)
print(test_set.classes)
image,target = test_set[0]
print(image)
print(test_set.classes[target])
'''
Files already downloaded and verified
Files already downloaded and verified
['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
<PIL.Image.Image image mode=RGB size=32x32 at 0x1760360A0>
cat
'''
CIFAR-10
包含了60000张32*32对彩色图片,共有10个类别,每个类别有6000张图片。50000张图片为训练集,10000张图片为测试集。
transforms和datasets结合,测试:
import torchvision
from torchvision import transforms
from torch.utils.tensorboard import SummaryWriterto_tensor = transforms.ToTensor()train_set = torchvision.datasets.CIFAR10(root="./dataset",transform=to_tensor,train=True,download=True)
test_set = torchvision.datasets.CIFAR10(root="./dataset",transform=to_tensor,train=False,download=True)writer = SummaryWriter("logs")
for i in range(10):image_tensor,target = train_set[i]writer.add_image(tag="CIFAR10",global_step=i,img_tensor=image_tensor)writer.close()
5. DataLoader使用
DataLoader(dataset, batch_size=1, shuffle=False, sampler=None,batch_sampler=None, num_workers=0, collate_fn=None,pin_memory=False, drop_last=False, timeout=0,worker_init_fn=None, *, prefetch_factor=2,persistent_workers=False)'''
datase:自定义的数据集
batch_size:每组数据的数量
shuffle:是否打乱数据
num_workers:加载数据,采用进行的数量。0:采用一个主进程加载数据
drop_list:分组余下的数据是否舍去。如80个数据,分组大小为30,余下20数据无法成为一组,是否舍去
'''
DataLoader会将每个batch中的img和target分别打包
测试:
import torchvision
from torch.utils.data import DataLoader
from torchvision.transforms import transforms# 准备的测试数据集
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,download=True,transform=transforms.ToTensor())# 定义dataloader
test_loader = DataLoader(test_data,shuffle=True,batch_size=4,num_workers=0,drop_last=False)# 测试数据集中第一张图片及target
img,target = test_data[0]
print(img.shape)
print(target)for data in test_loader:imgs,targets = dataprint(imgs.shape)print(targets)'''
torch.Size([3, 32, 32])
3
torch.Size([4, 3, 32, 32])
tensor([7, 0, 8, 7])
torch.Size([4, 3, 32, 32])
tensor([2, 6, 9, 3])
'''
使用tensorboard进行展示
import torchvision
from torch.utils.data import DataLoader
from torchvision.transforms import transforms
from torch.utils.tensorboard import SummaryWriter# 准备的测试数据集
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,download=True,transform=transforms.ToTensor())# 定义dataloader
test_loader = DataLoader(test_data,shuffle=True,batch_size=4,num_workers=0,drop_last=False)writer = SummaryWriter("logs")
i = 0
for data in test_loader:imgs,targets = datawriter.add_images(tag="DataLoader",img_tensor=imgs,global_step=i)i = i + 1
writer.close()

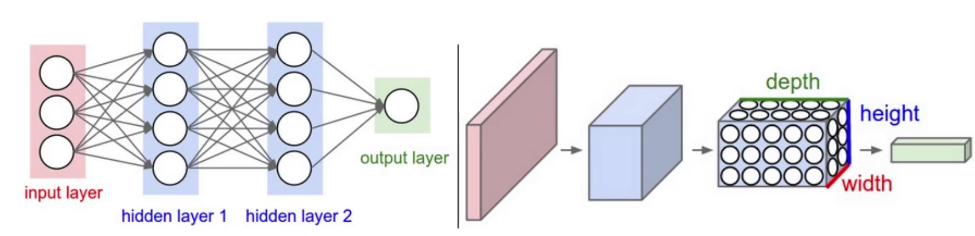
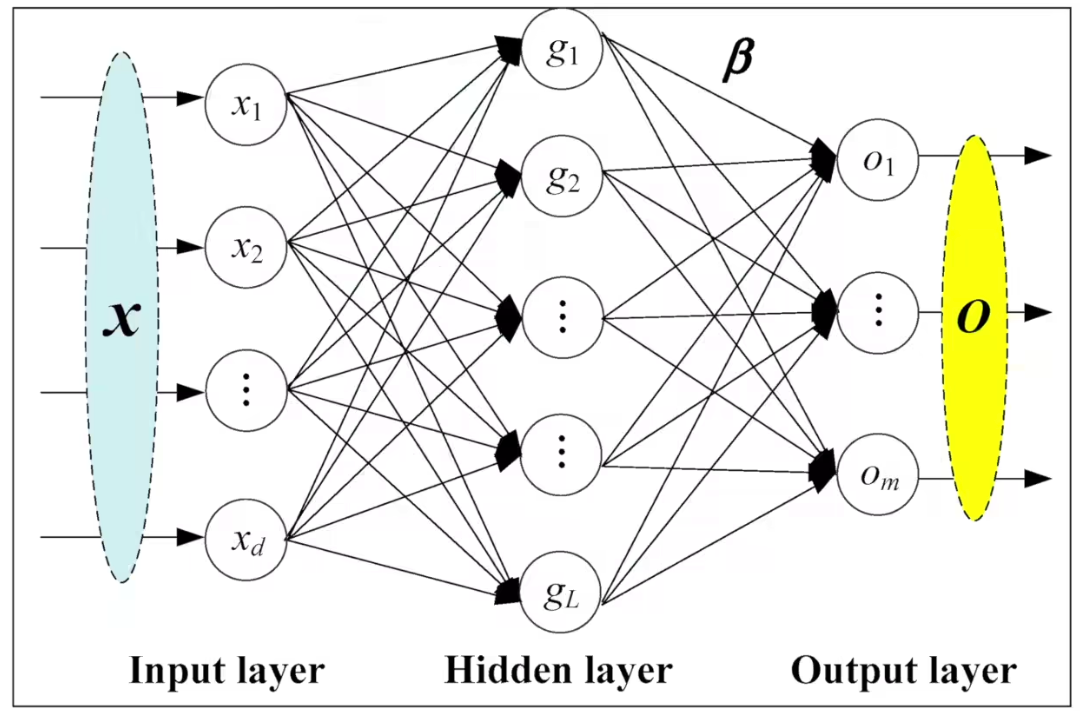
6. 神经网络
6.1 神经网络的基本骨架
Torch.NN,(Neural network)。
| 模块 | 介绍 |
|---|---|
Module | Base class for all neural network modules.所有神经网络的基类。 |
Sequential | A sequential container. |
ModuleList | Holds submodules in a list. |
ModuleDict | Holds submodules in a dictionary. |
ParameterList | Holds parameters in a list. |
ParameterDict | Holds parameters in a dictionary. |
前向传播:
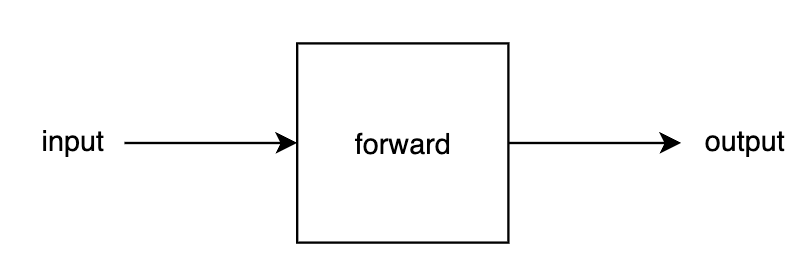
定义网络,继承Module类,重写forward方法。官方示例:
import torch.nn as nn
import torch.nn.functional as Fclass Model(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv2d(1, 20, 5)self.conv2 = nn.Conv2d(20, 20, 5)def forward(self, x):x = F.relu(self.conv1(x))return F.relu(self.conv2(x))
测试:
import torch
from torch import nnclass MyModel(nn.Module):def __init__(self, *args, **kwargs):super().__init__(*args, **kwargs)def forward(self,input):output = input + 1return outputmy_model = MyModel()
x = torch.tensor(1.0)
output = my_model(x)
print(output) # tensor(2.)
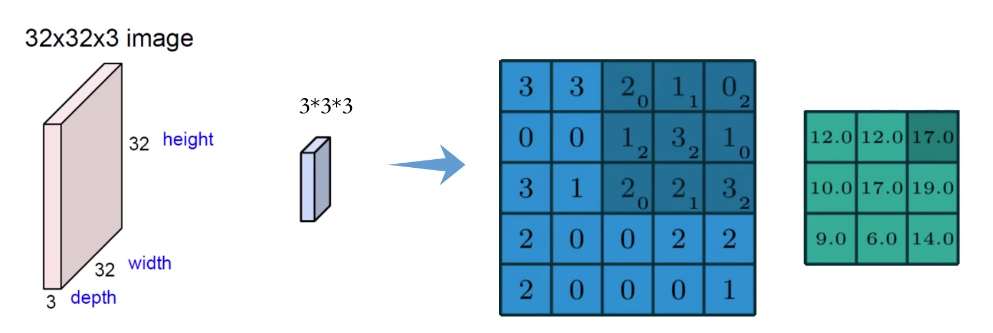
6.2 卷积层
卷积层涉及参数:
- 滑动窗口步长
- 卷积核尺寸
- 边缘填充
- 卷积核个数
特征图尺寸计算:
长度: H 2 = H 1 − F H + 2 P S + 1 宽度: W 2 = W 1 − F W + 2 P S + 1 其中, W 1 、 H 1 表示输入的宽度、长度; W 2 、 H 2 表示输出特征图的宽度、长度; F 表示卷积核长和宽的大小; S 表示滑动窗口的步长; P 表示边界填充(加几圈 0 ) 长度:H_2 = \frac{H_1-F_H+2P}{S}+1 \\ 宽度:W_2 = \frac{W_1-F_W+2P}{S}+1\\ 其中,W_1、H_1表示输入的宽度、长度;W_2、H_2表示输出特征图的宽度、长度;\\ F表示卷积核长和宽的大小;S表示滑动窗口的步长;P表示边界填充(加几圈0) 长度:H2=SH1−FH+2P+1宽度:W2=SW1−FW+2P+1其中,W1、H1表示输入的宽度、长度;W2、H2表示输出特征图的宽度、长度;F表示卷积核长和宽的大小;S表示滑动窗口的步长;P表示边界填充(加几圈0)
| 名称 | 介绍 |
|---|---|
nn.Conv1d | Applies a 1D convolution over an input signal composed of several input planes. |
nn.Conv2d | Applies a 2D convolution over an input signal composed of several input planes. |
nn.Conv3d | Applies a 3D convolution over an input signal composed of several input planes. |
nn.ConvTranspose1d | Applies a 1D transposed convolution operator over an input image composed of several input planes. |
nn.ConvTranspose2d | Applies a 2D transposed convolution operator over an input image composed of several input planes. |
nn.ConvTranspose3d | Applies a 3D transposed convolution operator over an input image composed of several input planes. |
nn.LazyConv1d | A torch.nn.Conv1dmodule with lazy initialization of the in_channels argument of the Conv1d that is inferred from the input.size(1). |
nn.LazyConv2d | A torch.nn.Conv2dmodule with lazy initialization of the in_channels argument of the Conv2d that is inferred from the input.size(1). |
nn.LazyConv3d | A torch.nn.Conv3dmodule with lazy initialization of the in_channels argument of the Conv3d that is inferred from the input.size(1). |
nn.LazyConvTranspose1d | A torch.nn.ConvTranspose1d module with lazy initialization of the in_channels argument of the ConvTranspose1d that is inferred from the input.size(1). |
nn.LazyConvTranspose2d | A torch.nn.ConvTranspose2dmodule with lazy initialization of the in_channels argument of the ConvTranspose2d that is inferred from the input.size(1). |
nn.LazyConvTranspose3d | A torch.nn.ConvTranspose3d module with lazy initialization of the in_channels argument of the ConvTranspose3d that is inferred from the input.size(1). |
nn.Unfold | Extracts sliding local blocks from a batched input tensor. |
nn.Fold | Combines an array of sliding local blocks into a large containing tensor. |
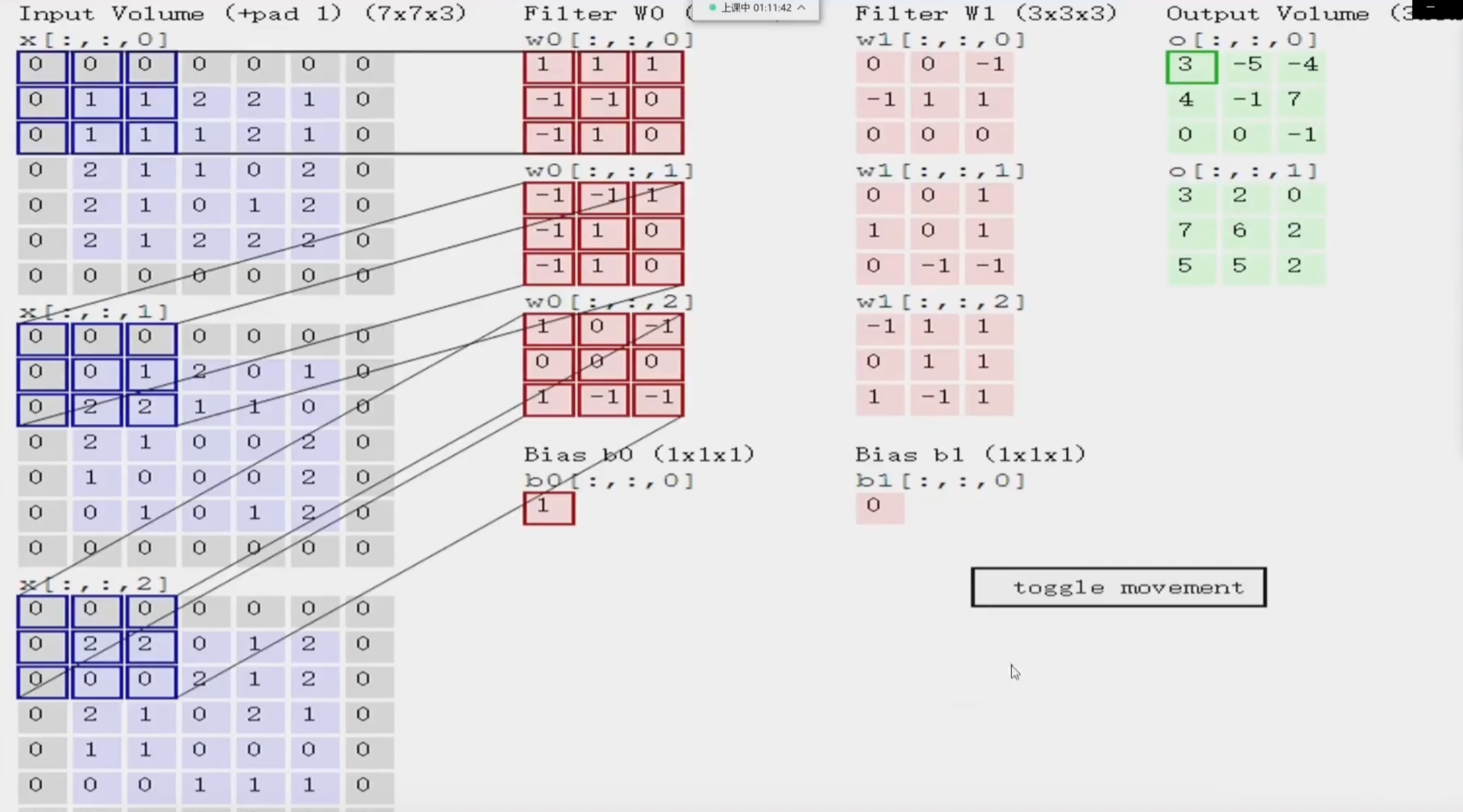
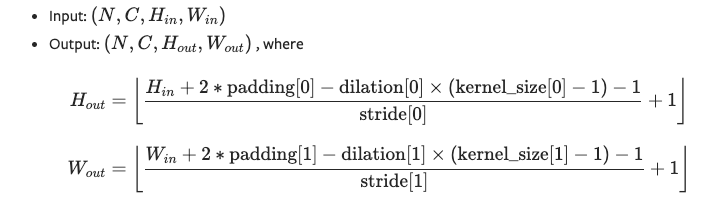
CONV2D
需要自定义卷积核时使用:
torch.nn.functional.conv2d(input, weight, bias=None, stride=1, padding=0, dilation=1, groups=1) → Tensor
参数:

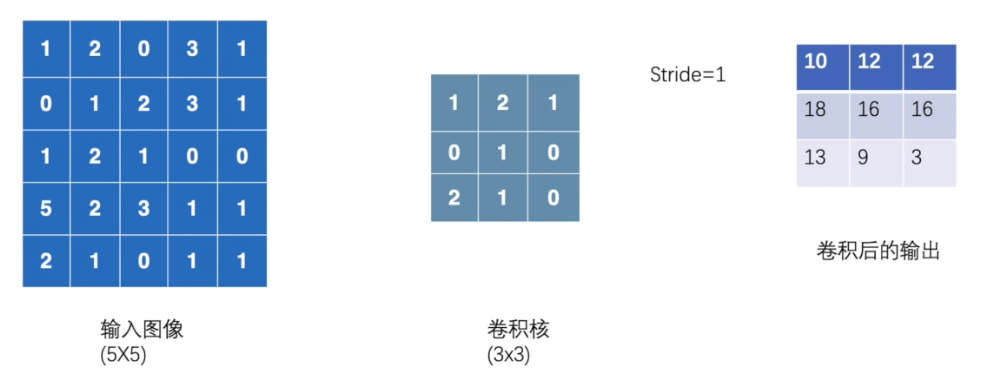
测试:
"""
@Author :shw
@Date :2023/10/17 13:35
"""
import torch.nn.functional as F
import torch# 定义输入
input = torch.tensor([[1,2,0,3,1],[0,1,2,3,1],[1,2,1,0,0],[5,2,3,1,1],[2,1,0,1,1]])
# 定义卷积核
kernel = torch.tensor([[1,2,1],[0,1,0],[2,1,0]])# CONV2D要求输入为(minibatch,in_channels,iH,iW)格式,所以要对格式进行变换
input = torch.reshape(input,(1,1,5,5))
# CONV2D要求卷积核为(out_channels,in_channels/groups,kH,kW)格式
kernel = torch.reshape(kernel,(1,1,3,3))output = F.conv2d(input,kernel,stride=1)
print(output)
'''
tensor([[[[10, 12, 12],[18, 16, 16],[13, 9, 3]]]])
'''
不需要自定义卷积核
语法:
torch.nn.Conv2d(in_channels: int, out_channels: int, kernel_size: Union[T, Tuple[T, T]], stride: Union[T, Tuple[T, T]] = 1, padding: Union[T, Tuple[T, T]] = 0, dilation: Union[T, Tuple[T, T]] = 1, groups: int = 1, bias: bool = True, padding_mode: str = 'zeros')
参数:
- in_channels (int) – Number of channels in the input image
- out_channels (int) – Number of channels produced by the convolution
- kernel_size (int or tuple) – Size of the convolving kernel
- stride (int or tuple, optional) – Stride of the convolution. Default: 1
- padding (int or tuple, optional) – Zero-padding added to both sides of the input. Default: 0
- padding_mode (string*,* optional) –
'zeros','reflect','replicate'or'circular'. Default:'zeros' - dilation (int or tuple, optional) – Spacing between kernel elements. Default: 1
- groups (int, optional) – Number of blocked connections from input channels to output channels. Default: 1
- bias (bool, optional) – If
True, adds a learnable bias to the output. Default:True
测试:
from torchvision import datasets
from torch.nn import Conv2d
import torch
from torchvision import transforms
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriterto_tensor = transforms.ToTensor()
# 读入数据
input = datasets.CIFAR10(root="./dataset",train=False,transform=to_tensor,download=True)
# 定义dataloader
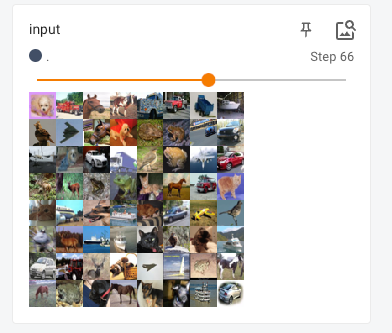
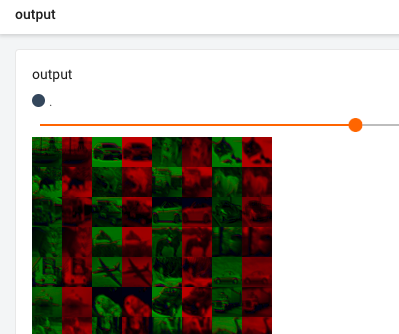
dataloader = DataLoader(input,batch_size=64,shuffle=True,num_workers=0,drop_last=False)class MyModel(torch.nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.conv1 = Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1,padding=0)def forward(self,input):x = self.conv1(input)return xwriter = SummaryWriter("logs")mymodel = MyModel()
step = 0
for data in dataloader:images,targets = dataoutput = mymodel(images)writer.add_images("input",images,global_step=step)# 因为显示图片最多3个通道,这里我们输出的结果为6个通道,所以要进行变换# 第一个值我们不知道为多少,所以填写-1,会自动根据设定的数值进行计算output = torch.reshape(output,(-1,3,30,30))writer.add_images("output",output,global_step=step)step = step + 1writer.close()
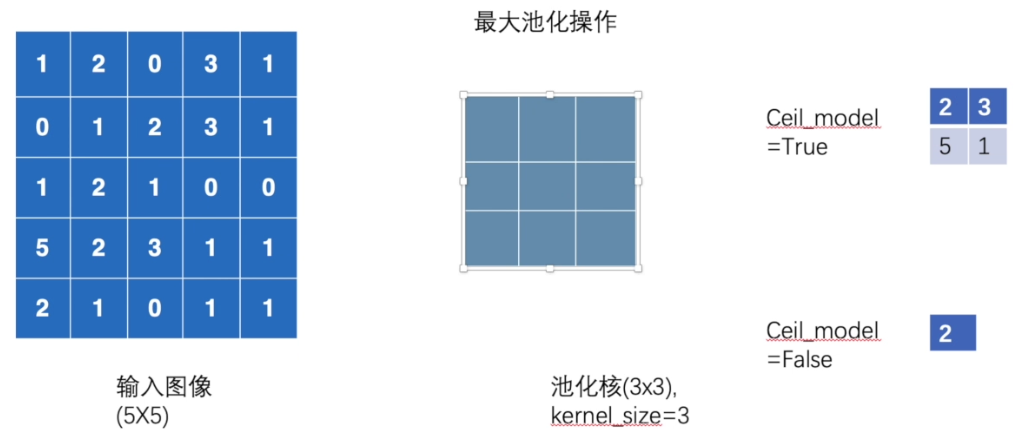
6.3 最大池化的使用
最大池化(MaxPool),也称为下采样。MaxUnpool,称为下采样。
语法:
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
参数:
- kernel_size – the size of the window to take a max over
- stride – the stride of the window. Default value is
kernel_size - padding – implicit zero padding to be added on both sides
- dilation – a parameter that controls the stride of elements in the window
- return_indices – if
True, will return the max indices along with the outputs. Useful fortorch.nn.MaxUnpool2dlater - ceil_mode – when True, will use ceil(向上取整) instead of floor(向下取整) to compute the output shape,且保留模式。
测试:
import torch
from torch.nn import Conv2d,MaxPool2d,Module
from torch.utils.tensorboard import SummaryWriter
from torchvision import transformsto_tensor = transforms.ToTensor()input = torch.tensor([[1,2,0,3,1],[0,1,2,3,1],[1,2,1,0,0],[5,2,3,1,1],[2,1,0,1,1]])input = torch.reshape(input,(-1,1,5,5))class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)def forward(self,input):x = self.maxpool1(input)return xmymodel = MyModel()
res = mymodel(input)
print(res)
'''
tensor([[[[2, 3],[5, 1]]]])
'''
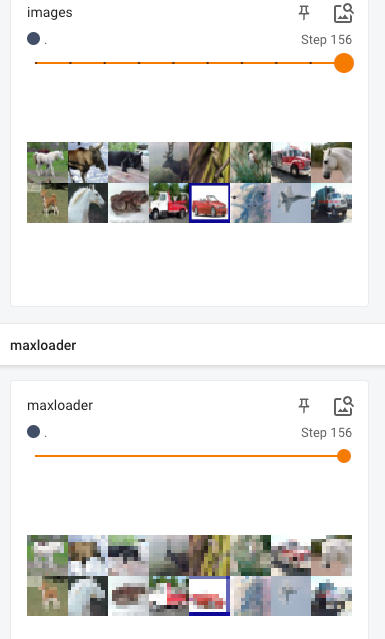
通过引入数据集进行测试:
from torchvision import datasets,transforms
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torch.nn import MaxPool2d,Moduleto_tensor = transforms.ToTensor()dataset = datasets.CIFAR10(root="./dataset",train=False,transform=to_tensor,download=True)
dataloader = DataLoader(dataset,batch_size=64,shuffle=True)class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.maxpool1 = MaxPool2d(kernel_size=3,ceil_mode=True)def forward(self,input):x = self.maxpool1(input)return xwriter = SummaryWriter("logs")step = 0
mymodel = MyModel()
for data in dataloader:images,targets = datawriter.add_images(tag="images",img_tensor=images,global_step=step)outputs = mymodel(images)writer.add_images(tag="maxloader",img_tensor=outputs,global_step=step)step = step + 1
writer.close()
6.4 非线性激活
常用的非线性激活:
- ReLU(线性整流单元)
- PReLU(参数线性整流单元)
- LeakyReLU(泄漏线性整流单元)
- ELU(指数线性单元)
- Sigmod
- Tanh
- Softmax
- …
ReLU
测试:
from torch.nn import ReLU,Module
import torchinput = torch.tensor([[1,-0.5],[-1,3]])input = torch.reshape(input,(-1,1,2,2))class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.relu1 = ReLU()def forward(self,input):output = self.relu1(input)return outputmymodel = MyModel()
output = mymodel(input)
print(output)
'''
tensor([[[[1., 0.],[0., 3.]]]])
'''
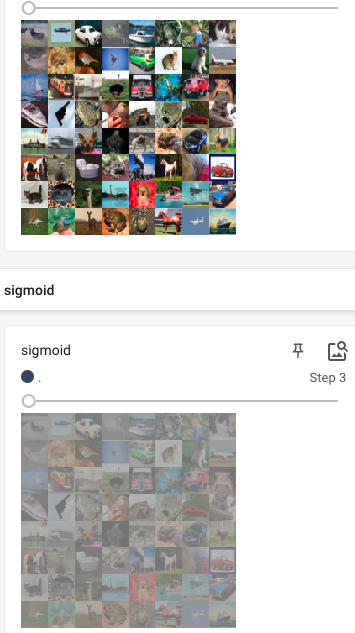
引入数据集,进行测试
"""
@Author :shw
@Date :2023/10/17 16:35
"""
from torch.nn import Sigmoid,Module
from torchvision import datasets,transforms
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter# 导入数据集
to_tensor = transforms.ToTensor()
dataset = datasets.CIFAR10(root="./dataset",train=False,transform=to_tensor,download=True)
dataloader = DataLoader(dataset,batch_size=64,shuffle=True,num_workers=0)# 定义模型
class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.sigmoid1 = Sigmoid()def forward(self,input):output = self.sigmoid1(input)return outputwriter = SummaryWriter("logs")step = 0
mymodel = MyModel()
for data in dataloader:imgs,targets = dataoutputs = mymodel(imgs)writer.add_images(tag="img",img_tensor=imgs,global_step=step)writer.add_images(tag="sigmoid",img_tensor=outputs,global_step=step)step = step + 1writer.close()
6.5 线性层及其他层
1. Normalization层(归一化层)
语法:
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
参数:
- num_features – C* from an expected input of size(N,C,H,W)
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Can be set to
Nonefor cumulative moving average (i.e. simple average). Default: 0.1 - affine – a boolean value that when set to
True, this module has learnable affine parameters. Default:True - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics, and initializes statistics buffersrunning_meanandrunning_varasNone. When these buffers areNone, this module always uses batch statistics. in both training and eval modes. Default:True
例子:
# With Learnable Parameters
m = nn.BatchNorm2d(100)
# Without Learnable Parameters
m = nn.BatchNorm2d(100, affine=False)
input = torch.randn(20, 100, 35, 45)
output = m(input)
2. Recurrent层(循环层)
nn.RNNBase | |
|---|---|
nn.RNN | Applies a multi-layer Elman RNN with tanhtanh or ReLUReLU non-linearity to an input sequence. |
nn.LSTM | Applies a multi-layer long short-term memory (LSTM) RNN to an input sequence. |
nn.GRU | Applies a multi-layer gated recurrent unit (GRU) RNN to an input sequence. |
nn.RNNCell | An Elman RNN cell with tanh or ReLU non-linearity. |
nn.LSTMCell | A long short-term memory (LSTM) cell. |
nn.GRUCell | A gated recurrent unit (GRU) cell |
3. Transformer层
nn.Transformer | A transformer model. |
|---|---|
nn.TransformerEncoder | TransformerEncoder is a stack of N encoder layers |
nn.TransformerDecoder | TransformerDecoder is a stack of N decoder layers |
nn.TransformerEncoderLayer | TransformerEncoderLayer is made up of self-attn and feedforward network. |
nn.TransformerDecoderLayer | TransformerDecoderLayer is made up of self-attn, multi-head-attn and feedforward network. |
4. Dropout层
为了防止过拟合
5. Liner层(线性层)
即全连接层。
nn.Identity | A placeholder identity operator that is argument-insensitive. |
|---|---|
nn.Linear | Applies a linear transformation to the incoming data: y = x T A + b y=x^TA+b y=xTA+b |
nn.Bilinear | Applies a bilinear transformation to the incoming data: y = x 1 T A x 2 + b y=x_1^TAx_2+b y=x1TAx2+b |
nn.LazyLinear | A torch.nn.Linearmodule with lazy initialization. |
测试:
import torch
from torchvision import datasets,transforms
from torch.utils.data import DataLoader
from torch.nn import Module,Linearto_tensor = transforms.ToTensor()dataset = datasets.CIFAR10(root="./dataset",train=True,transform=to_tensor,download=True)
dataloader = DataLoader(dataset,batch_size=64,shuffle=True,num_workers=0,drop_last=True)class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.linear1 = Linear(in_features=196608,out_features=10)def forward(self,input):output = self.linear1(input)return outputmymodel = MyModel()
for data in dataloader:imgs,targets = dataimgs_flatten = torch.flatten(imgs) # 将数据展平output = mymodel(imgs_flatten)print(output)
'''
tensor([-0.3241, 0.1549, -0.3120, 0.1616, -0.0332, 0.0360, 0.0210, 0.0720,-0.1955, 0.0475], grad_fn=<ViewBackward0>)
tensor([-0.0349, -0.1776, -0.5392, 0.2040, 0.1981, -0.0211, -0.0833, 0.3111,-0.2447, -0.2244], grad_fn=<ViewBackward0>)......
'''
torch.flatten
将多维数据展平(一维)
语法:
torch.flatten(input, start_dim=0, end_dim=-1) → Tensor
参数:
- input (Tensor) – the input tensor.
- start_dim (int) – the first dim to flatten
- end_dim (int) – the last dim to flatten
6.6 小实战及Sequential
Sequential
语法:
torch.nn.Sequential(*args)
例子:
# Example of using Sequential
model = nn.Sequential(nn.Conv2d(1,20,5),nn.ReLU(),nn.Conv2d(20,64,5),nn.ReLU())# Example of using Sequential with OrderedDict
model = nn.Sequential(OrderedDict([('conv1', nn.Conv2d(1,20,5)),('relu1', nn.ReLU()),('conv2', nn.Conv2d(20,64,5)),('relu2', nn.ReLU())]))
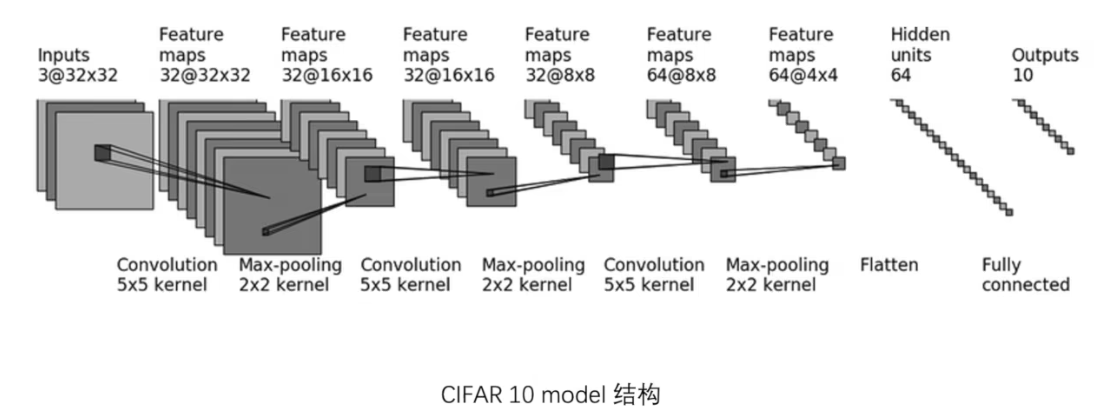
对CIFAR10进行分类的神经网络
import torch
from torch.nn import Module,Conv2d,Linear,MaxPool2d,Sequential,Flattenclass MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.conv1 = Conv2d(3,32,5,padding=2,stride=1)self.maxpool1 = MaxPool2d(2)self.conv2 = Conv2d(32,32,5,padding=2,stride=1)self.maxpool2 = MaxPool2d(2)self.conv3 = Conv2d(32,64,5,padding=2,stride=1)self.maxpool3 = MaxPool2d(2)self.flatten = Flatten()self.linear1 = Linear(1024,64)self.linear2 = Linear(64,10)def forward(self,x):x = self.conv1(x)x = self.maxpool1(x)x = self.conv2(x)x = self.maxpool2(x)x = self.conv3(x)x = self.maxpool3(x)x = self.flatten(x)x = self.linear1(x)x = self.linear2(x)return xmymodel = MyModel()
input = torch.ones((63,3,32,32))
output = mymodel(input)
print(output.shape)
# torch.Size([63, 10])
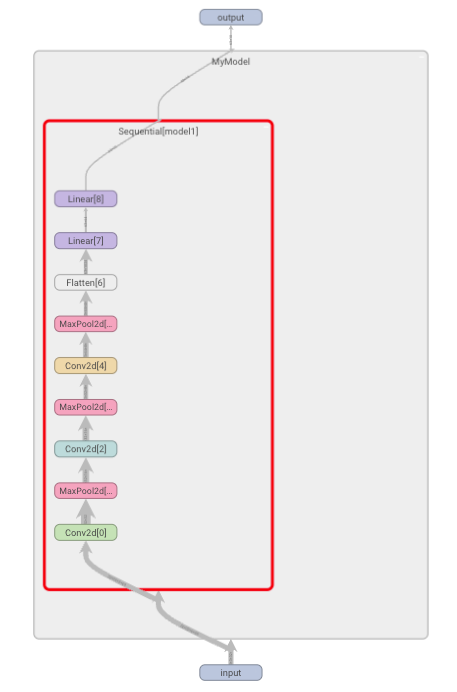
使用Sequential进行改进
import torch
from torch.nn import Module,Conv2d,Linear,MaxPool2d,Sequential,Flatten
from torch.utils.tensorboard import SummaryWriterclass MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model1 = Sequential(Conv2d(3,32,5,padding=2,stride=1),MaxPool2d(2),Conv2d(32,32,5,padding=2,stride=1),MaxPool2d(2),Conv2d(32,64,5,padding=2,stride=1),MaxPool2d(2),Flatten(),Linear(1024,64),Linear(64,10))def forward(self,x):x = self.model1(x)return xmymodel = MyModel()input = torch.ones((63,3,32,32))
output = mymodel(input)
print(output.shape)
# torch.Size([63, 10])writer = SummaryWriter("logs") # 使用SummaryWriter展示模型
writer.add_graph(mymodel,input)
writer.close()
7. 损失函数与反向传播
损失函数:
- 计算实际输出和目标之间的差距
- 为我们更新输出提供一定的依据(反向传播),为每个卷积核中的参数设置了一个
grad,即梯度。
nn.L1Loss
nn.MSELoss
nn.CrossEntropyLoss
nn.CTCLoss
nn.NLLLoss
nn.PoissonNLLLoss
nn.GaussianNLLLoss
nn.KLDivLoss
nn.BCELoss
nn.BCEWithLogitsLoss
nn.MarginRankingLoss
nn.HingeEmbeddingLoss
nn.MultiLabelMarginLoss
nn.HuberLoss
nn.SmoothL1Loss
nn.SoftMarginLoss
nn.MultiLabelSoftMarginLoss
nn.CosineEmbeddingLoss
nn.MultiMarginLoss
nn.TripletMarginLoss
nn.TripletMarginWithDistanceLoss
L1Loss测试
import torch
from torch.nn import L1Lossinputs = torch.tensor([1,2,3],dtype=torch.float32)
targets = torch.tensor([1,2,5],dtype=torch.float32)inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))loss = L1Loss()
result = loss(inputs,targets)
print(result) # tensor(0.6667)
均方误差MSELOSS
测试:
import torch
from torch.nn import MSELossinputs = torch.tensor([1,2,3],dtype=torch.float32)
targets = torch.tensor([1,2,5],dtype=torch.float32)inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))loss_mse = MSELoss()
result_mse = loss_mse(inputs,targets)
print(result_mse)
# tensor(1.3333)
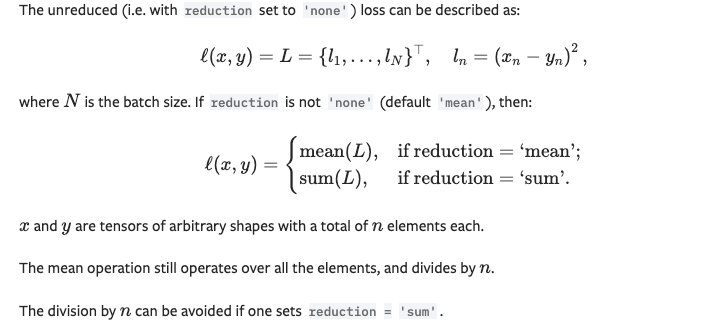
交叉熵损失函数 CROSSENTROPYLOSS

测试:
import torch
from torch.nn import CrossEntropyLosscross_entropy_loss = CrossEntropyLoss()
x = torch.tensor([0.1,0.2,0.3])
y = torch.tensor([1])
x = torch.reshape(x,(1,3))result_cross_entropy_loss = cross_entropy_loss(x,y)
print(result_cross_entropy_loss)
# tensor(1.1019)
使用数据集,测试交叉熵损失函数:
from torch.nn import Linear, Flatten, Conv2d, MaxPool2d, Sequential, Module
from torchvision import datasets,transforms
from torch.utils.data import DataLoader
from torch import nnto_tensor = transforms.ToTensor()
dataset = datasets.CIFAR10(root="./dataset",transform=to_tensor,download=True,train=False)
dataloader = DataLoader(dataset,batch_size=64,shuffle=True,num_workers=0)class MyModel(Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model1 = Sequential(Conv2d(3,32,5,padding=2,stride=1),MaxPool2d(2),Conv2d(32,32,5,padding=2,stride=1),MaxPool2d(2),Conv2d(32,64,5,padding=2,stride=1),MaxPool2d(2),Flatten(),Linear(1024,64),Linear(64,10))def forward(self,x):x = self.model1(x)return xloss = nn.CrossEntropyLoss()
mymodel = MyModel()
for data in dataloader:images,targets = dataoutputs = mymodel(images)loss_res = loss(outputs,targets)print("loss:{}".format(loss_res))
'''
loss:2.310953140258789
loss:2.3043782711029053
loss:2.318134307861328
loss:2.308051347732544
......
'''
反向传播
loss_res.backward() # 对损失结果 进行反向传播,求梯度
8. 优化器
根据优化器,使用反向传播求出的参数的梯度,对参数进行调整,达到误差降低目的。
| Algorithms | 描述 |
|---|---|
Adadelta | Implements Adadelta algorithm. |
Adagrad | Implements Adagrad algorithm. |
Adam | Implements Adam algorithm. |
AdamW | Implements AdamW algorithm. |
SparseAdam | Implements lazy version of Adam algorithm suitable for sparse tensors. |
Adamax | Implements Adamax algorithm (a variant of Adam based on infinity norm). |
ASGD | Implements Averaged Stochastic Gradient Descent. |
LBFGS | Implements L-BFGS algorithm, heavily inspired by minFunc |
RMSprop | Implements RMSprop algorithm. |
Rprop | Implements the resilient backpropagation algorithm. |
SGD | Implements stochastic gradient descent (optionally with momentum). |
官方例子:
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9) # lr 学习率
optimizer = optim.Adam([var1, var2], lr=0.0001)for input, target in dataset:optimizer.zero_grad() # 将上一次求出的梯度清零output = model(input)loss = loss_fn(output, target)loss.backward()optimizer.step() # 将参数进行调整优化
梯度下降SGD
语法:
torch.optim.SGD(params, lr=<required parameter>, momentum=0, dampening=0, weight_decay=0, nesterov=False)
参数:
- params (iterable) – iterable of parameters to optimize or dicts defining parameter groups
- lr (float) – learning rate
- momentum (float, optional) – momentum factor (default: 0)
- weight_decay (float, optional) – weight decay (L2 penalty) (default: 0)
- dampening ([float, optional) – dampening for momentum (default: 0)
- nesterov (bool optional) – enables Nesterov momentum (default: False)
测试:
from torchvision import datasets,transforms
from torch import nn,optim
from torch.utils.data import DataLoaderlr = 0.01
epochs = 10# 导入数据
to_tensor = transforms.ToTensor()
train_data = datasets.CIFAR10(root="./dataset",train=True,transform=to_tensor,download=True)
test_data = datasets.CIFAR10(root="./dataset",train=False,transform=to_tensor,download=True)
# 处理数据,分组打包
train_dataloader = DataLoader(train_data,batch_size=64,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_data,batch_size=64,shuffle=True,num_workers=0)# 构建网络
class Net(nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model1 = nn.Sequential(nn.Conv2d(3, 32, 5, padding=2, stride=1),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, padding=2, stride=1),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, padding=2, stride=1),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(1024, 64),nn.Linear(64, 10))def forward(self,x):return self.model1(x)# 实例化模型
net = Net()# 定义损失函数
loss = nn.CrossEntropyLoss()# 定义优化器
optimer = optim.SGD(net.parameters(),lr=lr)# 训练
for epoch in range(epochs):# 每个epoch,总损失running_loss = 0.0for data in train_dataloader:images, targets = dataoptimer.zero_grad()outputs = net(images)loss_output = loss(outputs,targets)loss_output.backward()optimer.step()running_loss = running_loss + loss_outputprint("epoch:{},loss:{}".format(epoch, running_loss))
'''
epoch:0,loss:1705.0546875
epoch:1,loss:1461.0814208984375
epoch:2,loss:1306.674072265625
epoch:3,loss:1216.27001953125
epoch:4,loss:1149.858154296875
'''
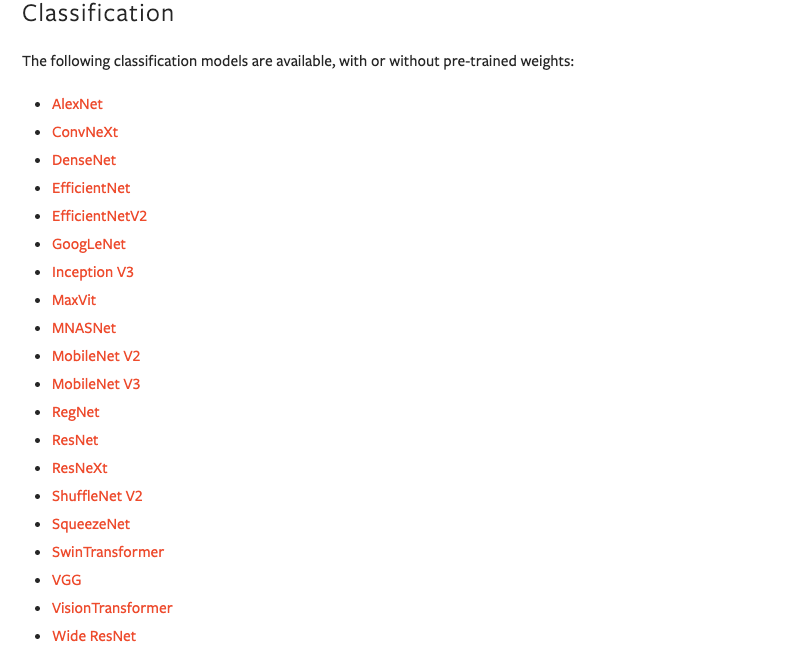
9. 现有网络模型的使用
分类模型:
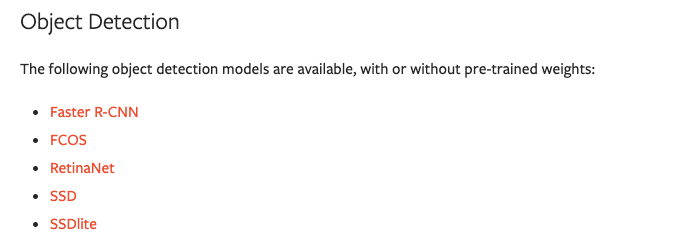
目标检测模型:
ImageNet数据集
注意:
- 下载ImageNet数据集,要求已经安装了Scipy模块。
- 数据集不能公开访问了,必须自己手动去下载数据文件,然后放在root指定的路径中
语法:
torchvision.datasets.ImageNet(root: str, split: str = 'train', **kwargs: Any)
参数:
- root (string) – Root directory of the ImageNet Dataset.
- split (string*,* optional) – The dataset split, supports
train, orval. - transform (callable*,* optional) – A function/transform that takes in an PIL image and returns a transformed version. E.g,
transforms.RandomCrop - target_transform (callable*,* optional) – A function/transform that takes in the target and transforms it.
- loader – A function to load an image given its path.
测试:
train_data = datasets.ImageNet(root="../dataset",split="train",transform=to_tensor)
VGG模型
VGG模型分类VGG11、VGG13、VGG16、VGG19。
VGG16
测试:
vgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True)
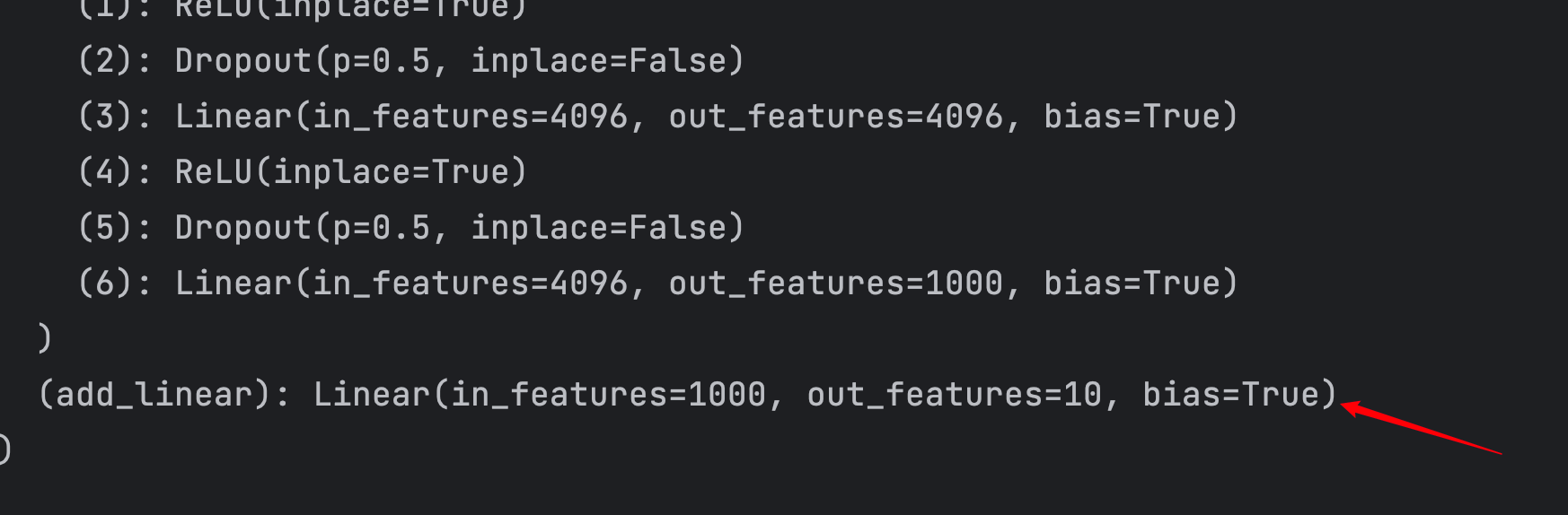
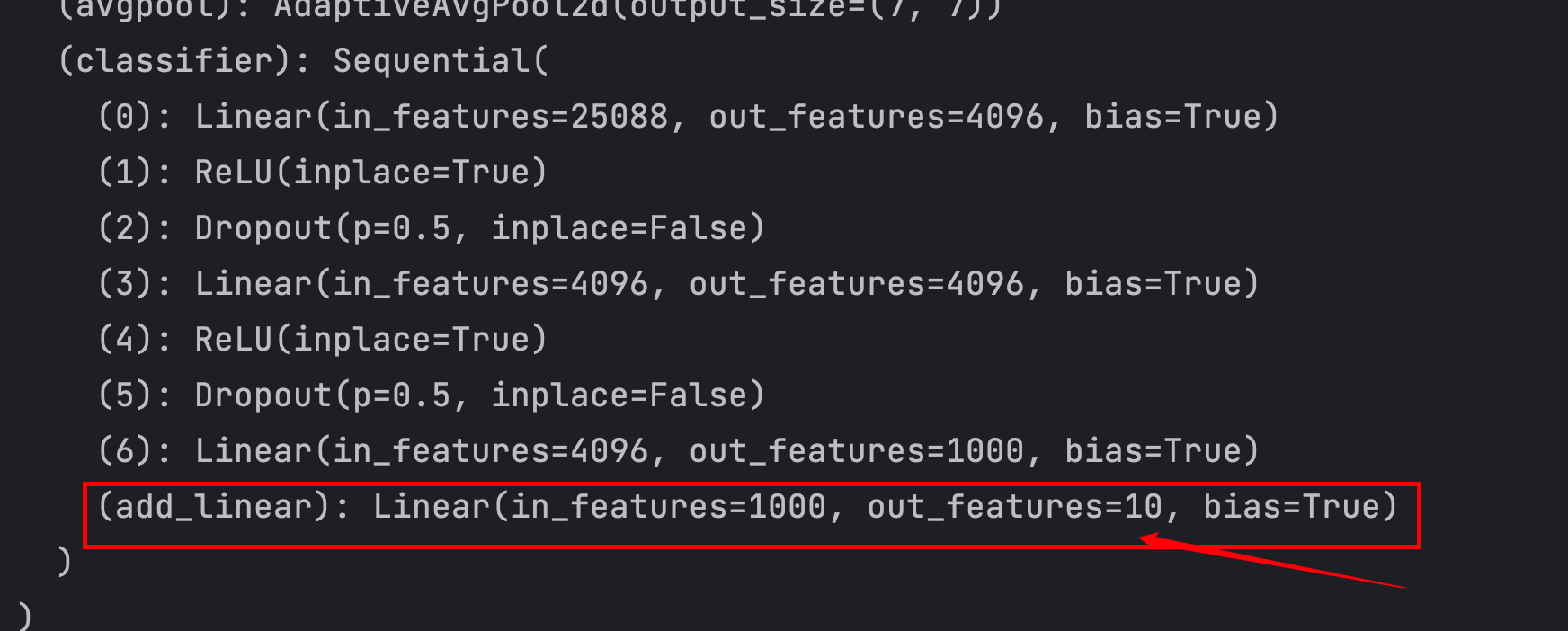
利用现有的网络,改动其结构。
例如:
添加一个线性层,将输出out_features为1000改为10。
from torchvision.models import vgg16,VGG16_Weights
from torch import nnvgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True)
# 添加一个线性层
vgg16.add_module("add_linear",nn.Linear(1000,10))
print(vgg16)
在VGG中的classifier中添加一层
from torchvision.models import vgg16,VGG16_Weights
from torch import nnvgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True)
# 在classifier中添加一层
vgg16.classifier.add_module("add_linear",nn.Linear(1000,10))
print(vgg16)
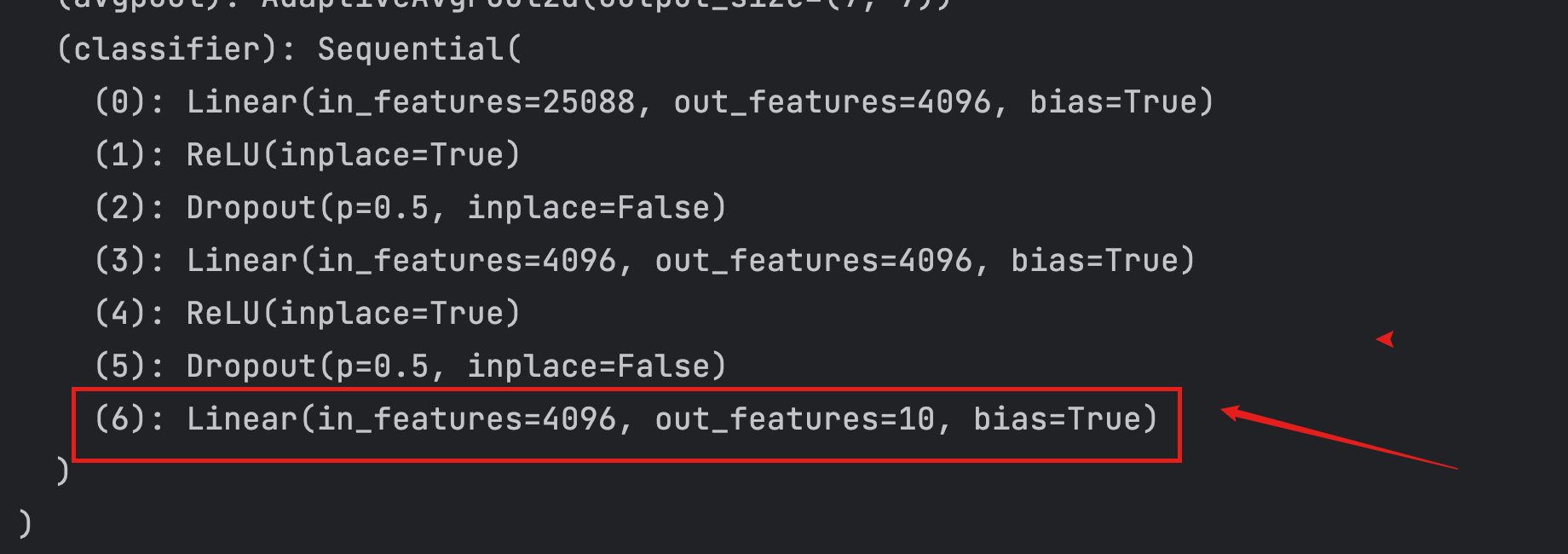
不进行添加,而在原来的基础上直接进行修改
from torchvision.models import vgg16,VGG16_Weights
from torch import nnvgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True)
# 不进行添加,而在原来的基础上直接进行修改
vgg16.classifier[6] = nn.Linear(4096,10)
print(vgg16)
10. 网络模型的保存与读取
方式一:使用torch.save()保存模型,使用torch.load()读取模型
保存模型结构和模型参数
-
保存
import torch from torchvision.models import vgg16,VGG16_Weights vgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True) # 保存方式 - 1 torch.save(vgg16,"./model/vgg16_method1.pth") # 模型一般保存为pth格式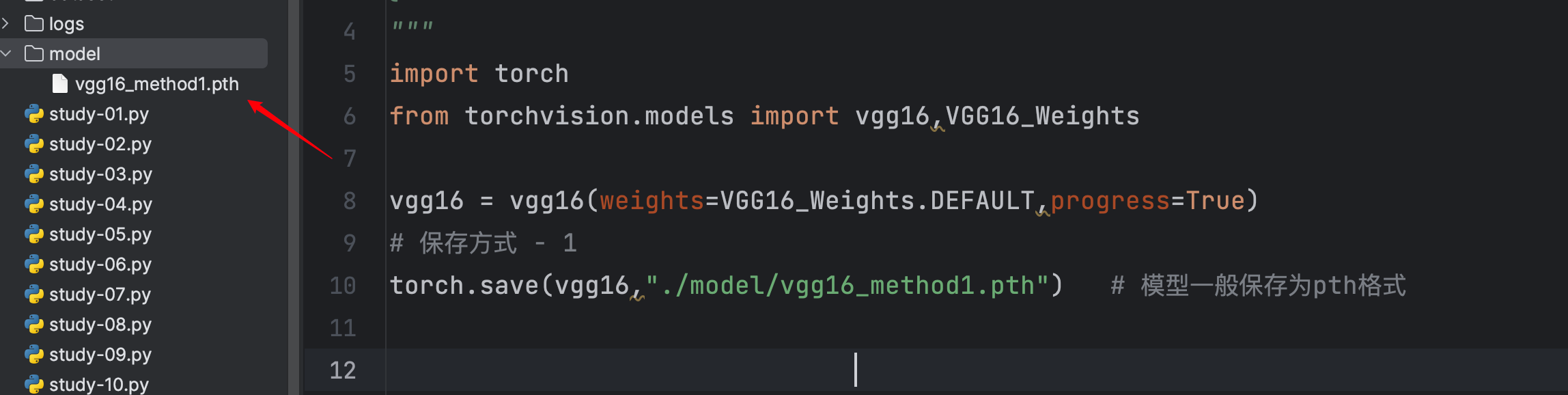
-
读取
import torch# 方式一 -> 保存方式1 , 加载模型 vgg16_method1 = torch.load("./model/vgg16_method1.pth") print(vgg16_method1)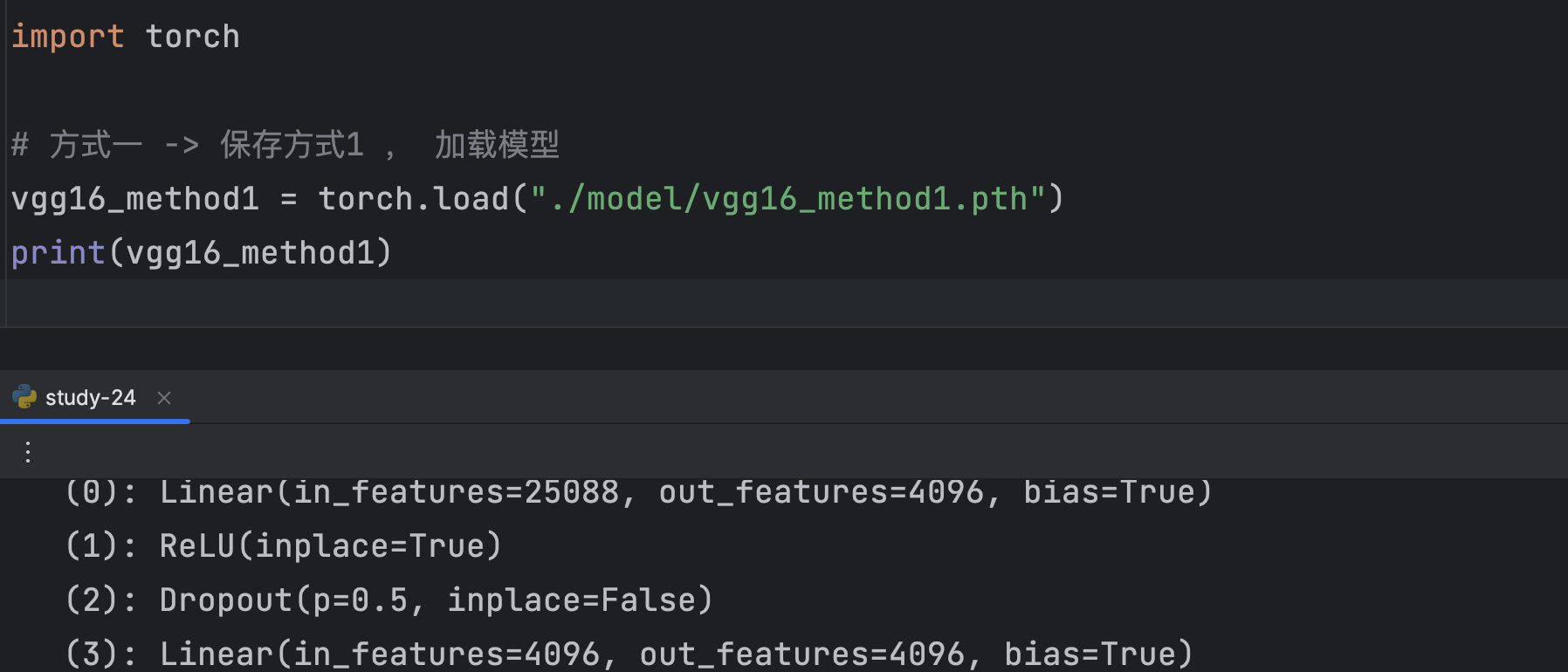
方式二:
保存模型参数,官方推荐!对于大模型来说,会节省存储空间。
-
保存
import torch from torchvision.models import vgg16,VGG16_Weightsvgg16 = vgg16(weights=VGG16_Weights.DEFAULT,progress=True)# 保存方式 - 2 # 将vgg16的状态保存为一种字典格式(不保存网络模型的结构,只保存网络模型的参数) torch.save(vgg16.state_dict(),"./model/vgg16_method2.pth") -
读取
因为直接读取到的知识参数,没有网络结构,所以我们要先创建网络结构,然后通过网络结构加载保存的参数
import torch from torchvision.models import vgg16# 方式二 -> 保存方式2 , 加载模型 vgg16_method2 = torch.load("./model/vgg16_method2.pth") vgg16 = vgg16() vgg16.load_state_dict(vgg16_method2) print(vgg16)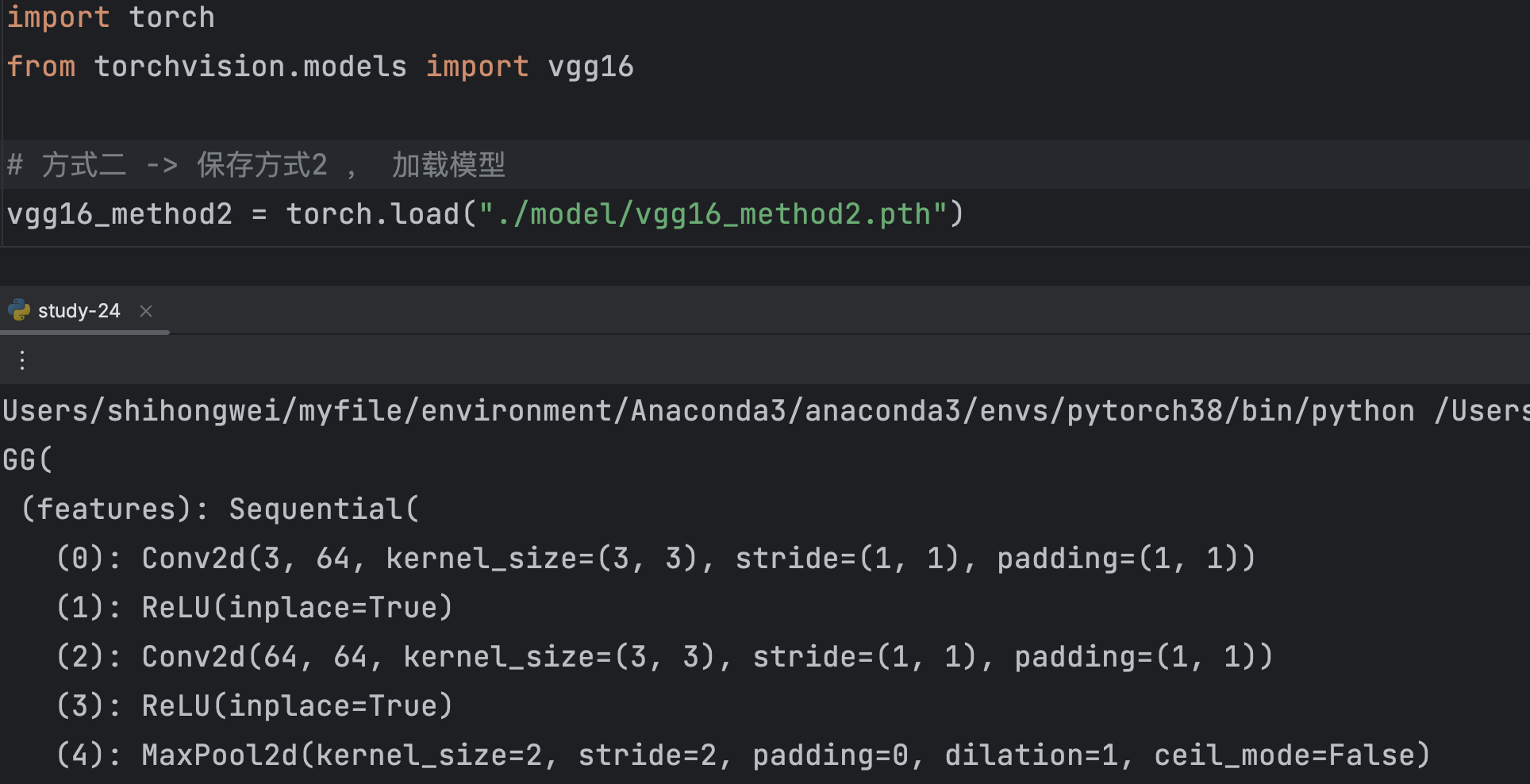
11. 完整的模型训练套路
使用CIFAR10数据集。
model.py
import torch
from torch import nn# 搭建网络
class Net(nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model = nn.Sequential(nn.Conv2d(3,32,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32, 32, kernel_size=5, padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32,64,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(1024,64),nn.Linear(64,10))def forward(self,x):return self.model(x)# 验证网络正确性
if __name__ == '__main__':net = Net()my_input = torch.ones((64,3,32,32))my_output = net(my_input)print(my_output.shape)
work_main.py
import torch
from torch.utils.data import DataLoader
from torchvision import transforms,datasets
from torch import nn
from torch.utils.tensorboard import SummaryWriter
from model import Net# 扫描数据集次数
epochs = 10
# 学习率
# learning_rate = 0.01
learning_rate = 1e-2 # 1e-2 = 1*10^(-2) = 0.01to_tensor = transforms.ToTensor()
# 读取数据
train_dataset = datasets.CIFAR10(root="./dataset",train=True,download=True,transform=to_tensor)
test_dataset = datasets.CIFAR10(root="./dataset",train=False,download=True,transform=to_tensor)
# 加载数据
train_dataloader = DataLoader(train_dataset,batch_size=64,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_dataset,batch_size=64,shuffle=True,num_workers=0)# 训练数据集大小
train_data_size = len(train_dataset)
# 测试数据集大小
test_data_size = len(test_dataset)
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 创建网络
net = Net()
# 定义损失函数
loss = nn.CrossEntropyLoss()
# 定义优化器
optimizer = torch.optim.SGD(net.parameters(),lr=learning_rate)# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0# 添加 tensorboard
writer = SummaryWriter("logs")# 训练
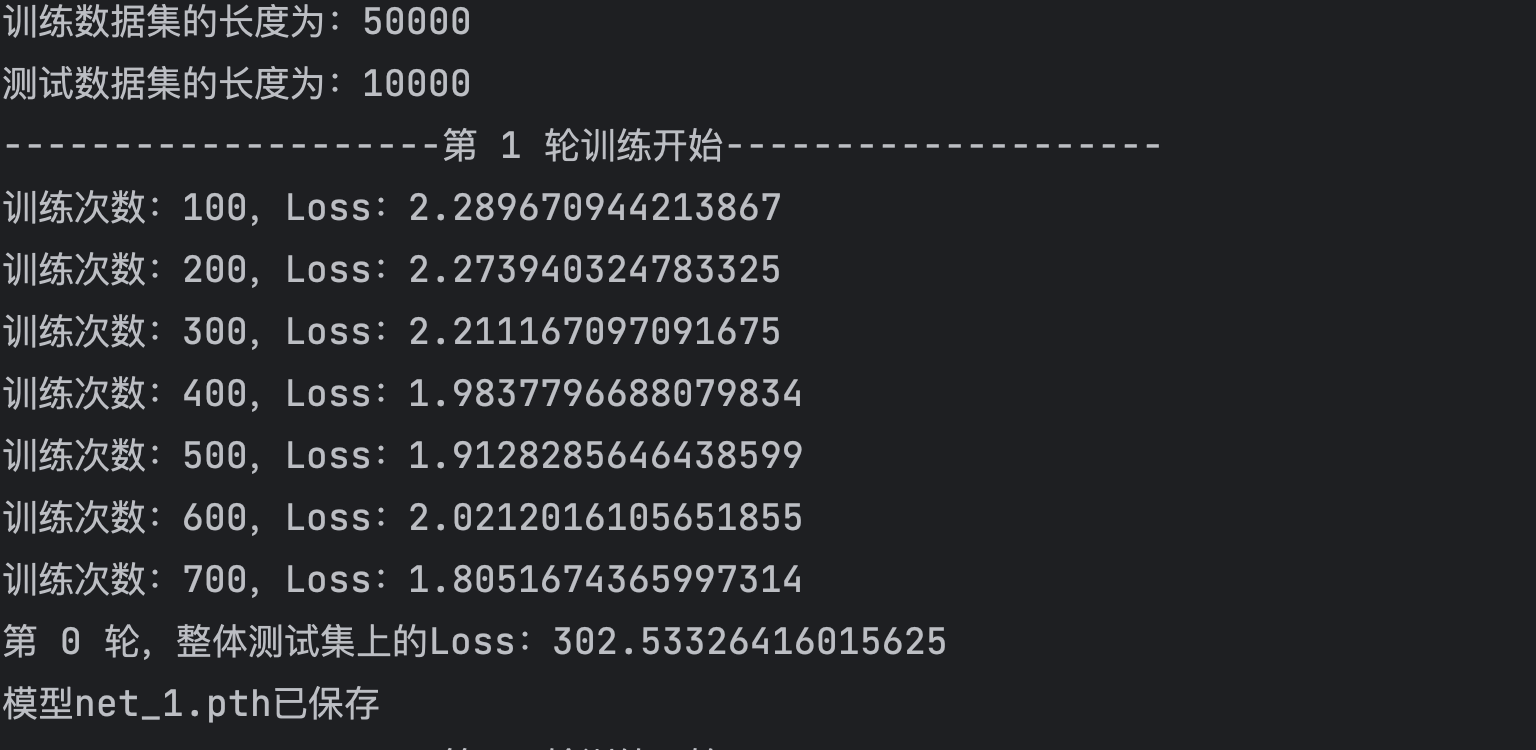
for epoch in range(epochs):print("--------------------第 {} 轮训练开始--------------------".format(epoch+1))for data in train_dataloader:images, targets = dataoutputs = net(images)loss_output = loss(outputs,targets)# 优化器优化模型optimizer.zero_grad()loss_output.backward()optimizer.step()total_train_step = total_train_step + 1if total_train_step%100 == 0:print("训练次数:{},Loss:{}".format(total_train_step, loss_output.item()))writer.add_scalar(tag="Train_Loss", scalar_value=loss_output.item(), global_step=total_train_step)# 在每轮训练之后进行测试# torch.no_grad() 不进行调优total_test_loss = 0 # 测试总损失with torch.no_grad():for data in test_dataloader:images,targets = dataoutputs = net(images)loss_output = loss(outputs,targets)total_test_loss = total_test_loss + loss_outputtotal_test_step = total_test_step + 1print("第 {} 轮,整体测试集上的Loss:{}".format(epoch,total_test_loss))writer.add_scalar(tag="Test_Total_Loss",scalar_value=total_test_loss,global_step=total_test_step)# 保存每一轮训练好的模型torch.save(net,"./model/net_{}.pth".format(epoch+1))print("模型net_{}.pth已保存".format(epoch+1))writer.close()

在分类问题中,需要显示正确率衡量指标,如:
import torchoutputs = torch.tensor([[0.1,0.2],[0.3,0.4]])
max_index = torch.argmax(outputs,dim=1) # 求出每行最大值的索引
input_targets = torch.tensor([0,1])
accuracy_num = (max_index==input_targets).sum()
print("准确率为:{}".format(accuracy_num/len(max_index)))
# 准确率为:0.5
将准确率加到我们上面所写的训练模型中
只需更改work_main.py
import torch
from torch.utils.data import DataLoader
from torchvision import transforms,datasets
from torch import nn
from torch.utils.tensorboard import SummaryWriter
from model import Net# 扫描数据集次数
epochs = 10
# 学习率
# learning_rate = 0.01
learning_rate = 1e-2 # 1e-2 = 1*10^(-2) = 0.01to_tensor = transforms.ToTensor()
# 读取数据
train_dataset = datasets.CIFAR10(root="./dataset",train=True,download=True,transform=to_tensor)
test_dataset = datasets.CIFAR10(root="./dataset",train=False,download=True,transform=to_tensor)
# 加载数据
train_dataloader = DataLoader(train_dataset,batch_size=64,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_dataset,batch_size=64,shuffle=True,num_workers=0)# 训练数据集大小
train_data_size = len(train_dataset)
# 测试数据集大小
test_data_size = len(test_dataset)
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 创建网络
net = Net()
# 定义损失函数
loss = nn.CrossEntropyLoss()
# 定义优化器
optimizer = torch.optim.SGD(net.parameters(),lr=learning_rate)# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0# 添加 tensorboard
writer = SummaryWriter("logs")# 训练
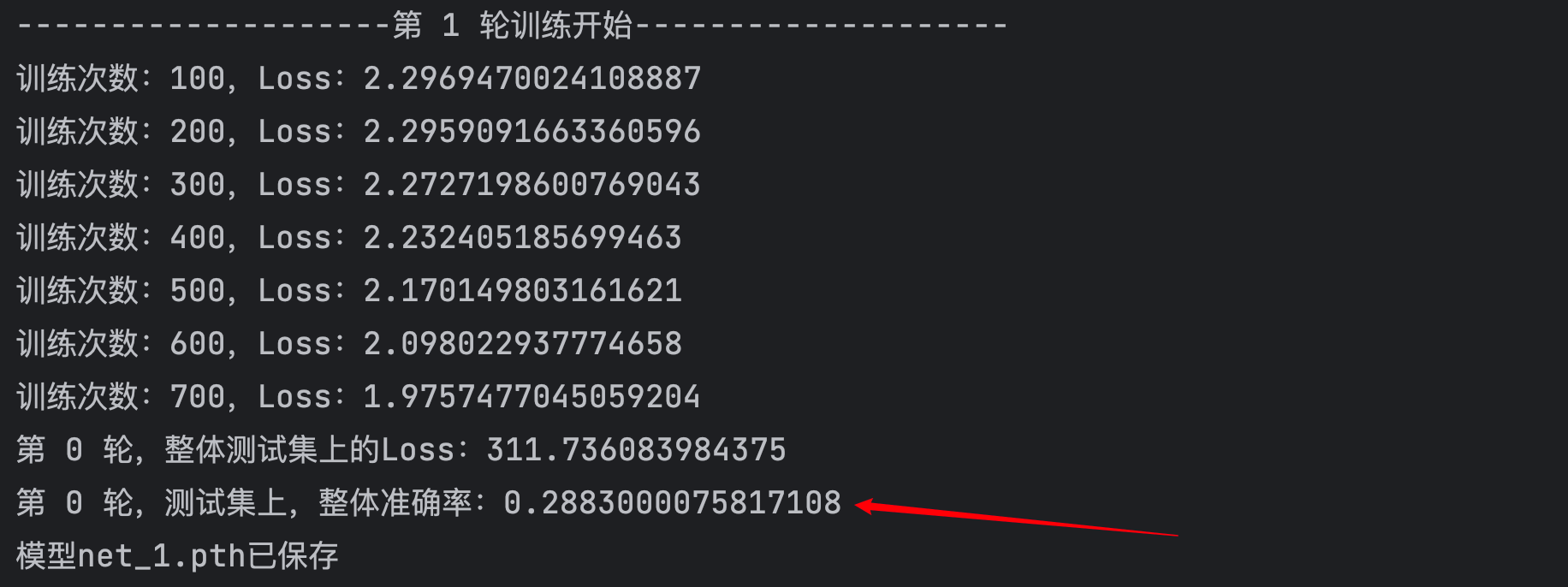
for epoch in range(epochs):print("--------------------第 {} 轮训练开始--------------------".format(epoch+1))for data in train_dataloader:images, targets = dataoutputs = net(images)loss_output = loss(outputs,targets)# 优化器优化模型optimizer.zero_grad()loss_output.backward()optimizer.step()total_train_step = total_train_step + 1if total_train_step%100 == 0:print("训练次数:{},Loss:{}".format(total_train_step, loss_output.item()))writer.add_scalar(tag="Train_Loss", scalar_value=loss_output.item(), global_step=total_train_step)# 在每轮训练之后进行测试# torch.no_grad() 不进行调优total_test_loss = 0 # 测试总损失total_accuracy = 0 # 整体正确的个数with torch.no_grad():for data in test_dataloader:images,targets = dataoutputs = net(images)loss_output = loss(outputs,targets)total_test_loss = total_test_loss + loss_outputaccuracy = (targets == torch.argmax(outputs,dim=1)).sum() # 计算正确的个数total_accuracy = total_accuracy + accuracytotal_test_step = total_test_step + 1print("第 {} 轮,整体测试集上的Loss:{}".format(epoch,total_test_loss))print("第 {} 轮,测试集上,整体准确率:{}".format(epoch,total_accuracy/test_data_size))writer.add_scalar(tag="Test_Total_Loss",scalar_value=total_test_loss,global_step=total_test_step)# 保存每一轮训练好的模型torch.save(net,"./model/net_{}.pth".format(epoch+1))print("模型net_{}.pth已保存".format(epoch+1))writer.close()
在有些代码中,人们在开始训练之前加上
net.train()。在开始测试之前加上net.eval()。train(),eval(),这仅仅对某些层有影响,如Dropout层、BatchNorm层等。并非全部的网络开始训练或者测试时都需要调用该方法。
12. 利用GPU训练
第一种GPU训练方式:
- 确定网络模型
- 准备数据(输入,标注)
- 损失函数
- 调用
.cuda()/或调用.to(device)方法
如:
device = torch.decive("cuda")
net = net.to(device)
使用CUDA
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torch import nn
import torch
from torchvision import transforms,datasetsclass Net(nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model = nn.Sequential(nn.Conv2d(3,32,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32, 32, kernel_size=5, padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32,64,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(1024,64),nn.Linear(64,10))def forward(self,x):return self.model(x)# 扫描数据集次数
epochs = 10
# 学习率
# learning_rate = 0.01
learning_rate = 1e-2 # 1e-2 = 1*10^(-2) = 0.01to_tensor = transforms.ToTensor()
# 读取数据
train_dataset = datasets.CIFAR10(root="./dataset",train=True,download=True,transform=to_tensor)
test_dataset = datasets.CIFAR10(root="./dataset",train=False,download=True,transform=to_tensor)
# 加载数据
train_dataloader = DataLoader(train_dataset,batch_size=64,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_dataset,batch_size=64,shuffle=True,num_workers=0)# 训练数据集大小
train_data_size = len(train_dataset)
# 测试数据集大小
test_data_size = len(test_dataset)
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 创建网络
net = Net()# 定义损失函数
loss = nn.CrossEntropyLoss()
# 定义优化器
optimizer = torch.optim.SGD(net.parameters(),lr=learning_rate)# 使用GPU!!
if torch.cuda.is_available():net = net.cuda() loss = loss.cuda()# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0# 添加 tensorboard
writer = SummaryWriter("logs")# 训练
for epoch in range(epochs):print("--------------------第 {} 轮训练开始--------------------".format(epoch+1))net.train()for data in train_dataloader:images, targets = data# 使用GPU!!if torch.cuda.is_available():images = images.cuda()targets = targets.cuda()outputs = net(images)loss_output = loss(outputs,targets)# 优化器优化模型optimizer.zero_grad()loss_output.backward()optimizer.step()total_train_step = total_train_step + 1if total_train_step%100 == 0:print("训练次数:{},Loss:{}".format(total_train_step, loss_output.item()))writer.add_scalar(tag="Train_Loss", scalar_value=loss_output.item(), global_step=total_train_step)# 在每轮训练之后进行测试net.eval()total_test_loss = 0 # 测试总损失total_accuracy = 0 # 整体正确的个数# torch.no_grad() 不进行调优with torch.no_grad():for data in test_dataloader:images,targets = data# 使用GPU!!if torch.cuda.is_available():images = images.cuda()targets = targets.cuda()outputs = net(images)loss_output = loss(outputs,targets)total_test_loss = total_test_loss + loss_outputaccuracy = (targets == torch.argmax(outputs,dim=1)).sum() # 计算正确的个数total_accuracy = total_accuracy + accuracytotal_test_step = total_test_step + 1print("第 {} 轮,整体测试集上的Loss:{}".format(epoch,total_test_loss))print("第 {} 轮,测试集上,整体准确率:{}".format(epoch,total_accuracy/test_data_size))writer.add_scalar(tag="Test_Total_Loss",scalar_value=total_test_loss,global_step=total_test_step)# 保存每一轮训练好的模型torch.save(net,"./model/net_{}.pth".format(epoch+1))print("模型net_{}.pth已保存".format(epoch+1))writer.close()
在MAC上,使用MPS
import torch
from torch.utils.data import DataLoader
from torchvision import transforms,datasets
from torch import nn
from torch.utils.tensorboard import SummaryWriterclass Net(nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model = nn.Sequential(nn.Conv2d(3,32,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32, 32, kernel_size=5, padding=2,stride=1),nn.MaxPool2d(2),nn.Conv2d(32,64,kernel_size=5,padding=2,stride=1),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(1024,64),nn.Linear(64,10))def forward(self,x):return self.model(x)# 扫描数据集次数
epochs = 10
# 学习率
# learning_rate = 0.01
learning_rate = 1e-2 # 1e-2 = 1*10^(-2) = 0.01to_tensor = transforms.ToTensor()
# 读取数据
train_dataset = datasets.CIFAR10(root="./dataset",train=True,download=True,transform=to_tensor)
test_dataset = datasets.CIFAR10(root="./dataset",train=False,download=True,transform=to_tensor)
# 加载数据
train_dataloader = DataLoader(train_dataset,batch_size=64,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_dataset,batch_size=64,shuffle=True,num_workers=0)# 训练数据集大小
train_data_size = len(train_dataset)
# 测试数据集大小
test_data_size = len(test_dataset)
print("训练数据集的长度为:{}".format(train_data_size))
print("测试数据集的长度为:{}".format(test_data_size))# 创建网络
net = Net()
# 定义损失函数
loss = nn.CrossEntropyLoss()
# 定义优化器
optimizer = torch.optim.SGD(net.parameters(),lr=learning_rate)# 使用GPU
device = torch.device("mps" if torch.backends.mps.is_available() else "cpu")
net.to(device)
loss.to(device)# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0# 添加 tensorboard
writer = SummaryWriter("gpu_logs")# 训练
for epoch in range(epochs):print("--------------------第 {} 轮训练开始--------------------".format(epoch+1))net.train()for data in train_dataloader:images, targets = data# 使用GPUimages = images.to(device)targets = targets.to(device)outputs = net(images)loss_output = loss(outputs,targets)# 优化器优化模型optimizer.zero_grad()loss_output.backward()optimizer.step()total_train_step = total_train_step + 1if total_train_step%100 == 0:print("训练次数:{},Loss:{}".format(total_train_step, loss_output.item()))writer.add_scalar(tag="Train_Loss", scalar_value=loss_output.item(), global_step=total_train_step)# 在每轮训练之后进行测试net.eval()total_test_loss = 0 # 测试总损失total_accuracy = 0 # 整体正确的个数# torch.no_grad() 不进行调优with torch.no_grad():for data in test_dataloader:images,targets = data# 使用GPUimages = images.to(device)targets = targets.to(device)outputs = net(images)loss_output = loss(outputs,targets)total_test_loss = total_test_loss + loss_outputaccuracy = (targets == torch.argmax(outputs,dim=1)).sum() # 计算正确的个数total_accuracy = total_accuracy + accuracytotal_test_step = total_test_step + 1print("第 {} 轮,整体测试集上的Loss:{}".format(epoch,total_test_loss))print("第 {} 轮,测试集上,整体准确率:{}".format(epoch,total_accuracy/test_data_size))writer.add_scalar(tag="Test_Total_Loss",scalar_value=total_test_loss,global_step=total_test_step)# 保存每一轮训练好的模型torch.save(net,"./model/net_{}.pth".format(epoch+1))print("模型net_{}.pth已保存".format(epoch+1))writer.close()
M1 Pro 使用GPU跑20轮,用时 0:01:39.507960 ,YYDS!
cuda分配给:
- 网络模型对象
- 损失函数对象
- 训练数据输入、标签,测试数据输入、标签
mps要分配给:
- 网络模型对象
- 损失函数对象
- 训练数据输入、标签,测试数据输入、标签
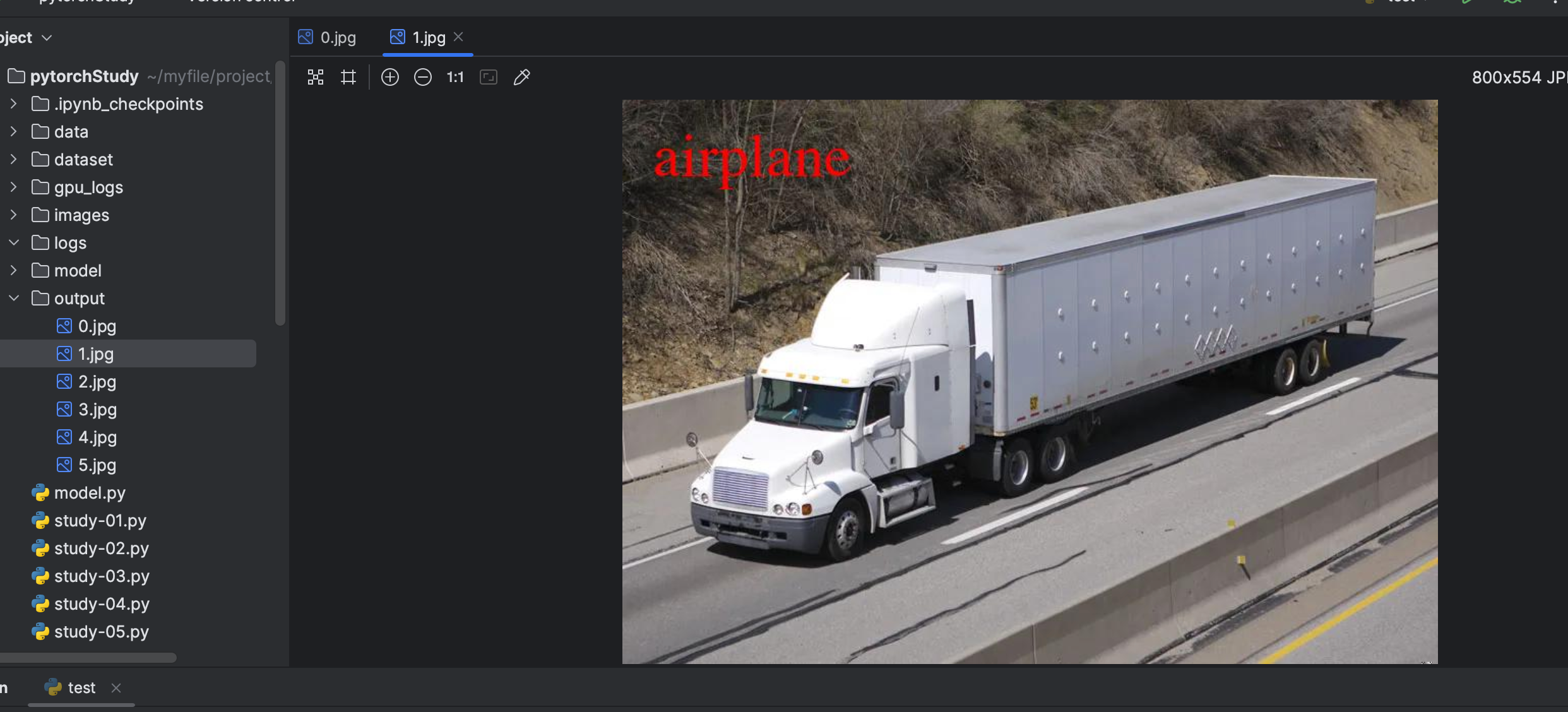
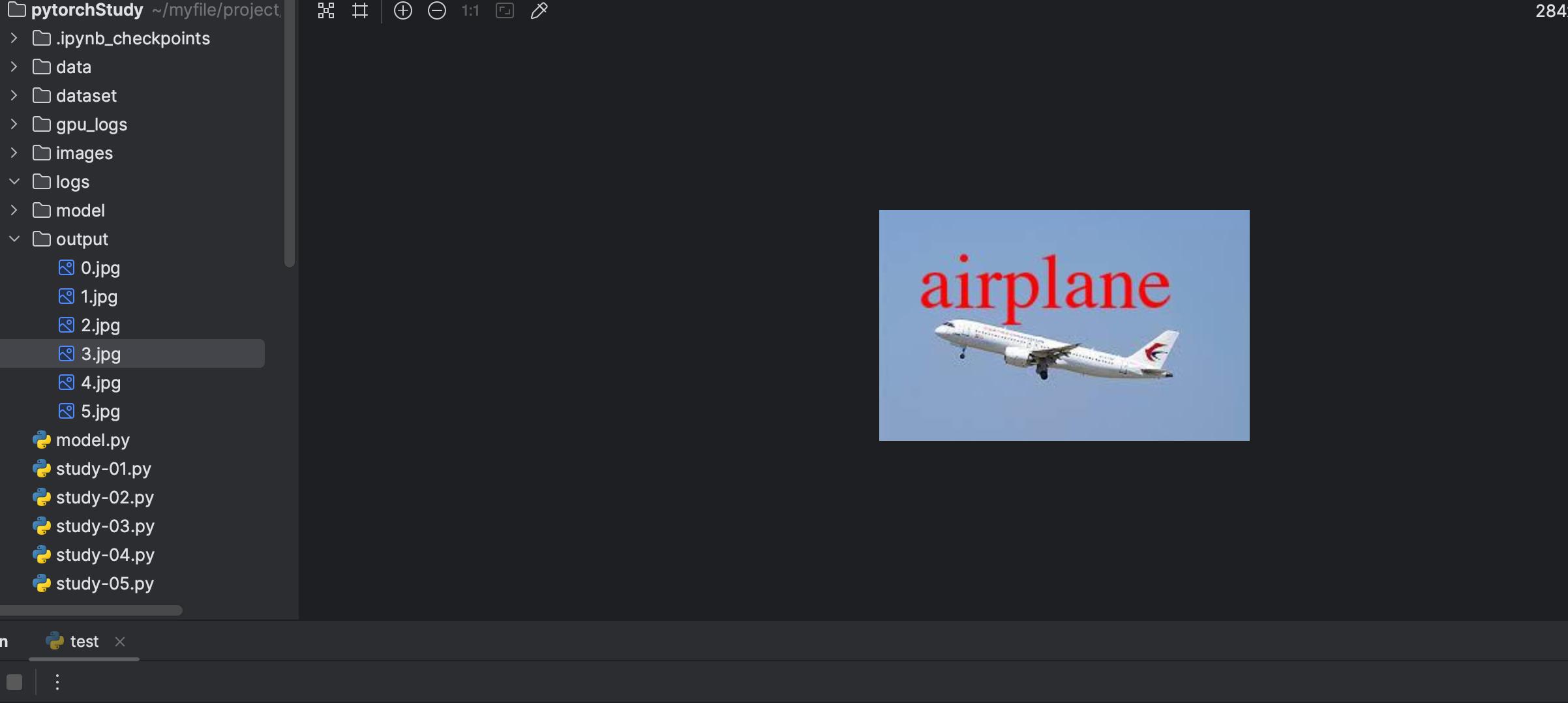
13. 完整的模型验证套路
利用已经训练好的模型,然后给它提供输入。
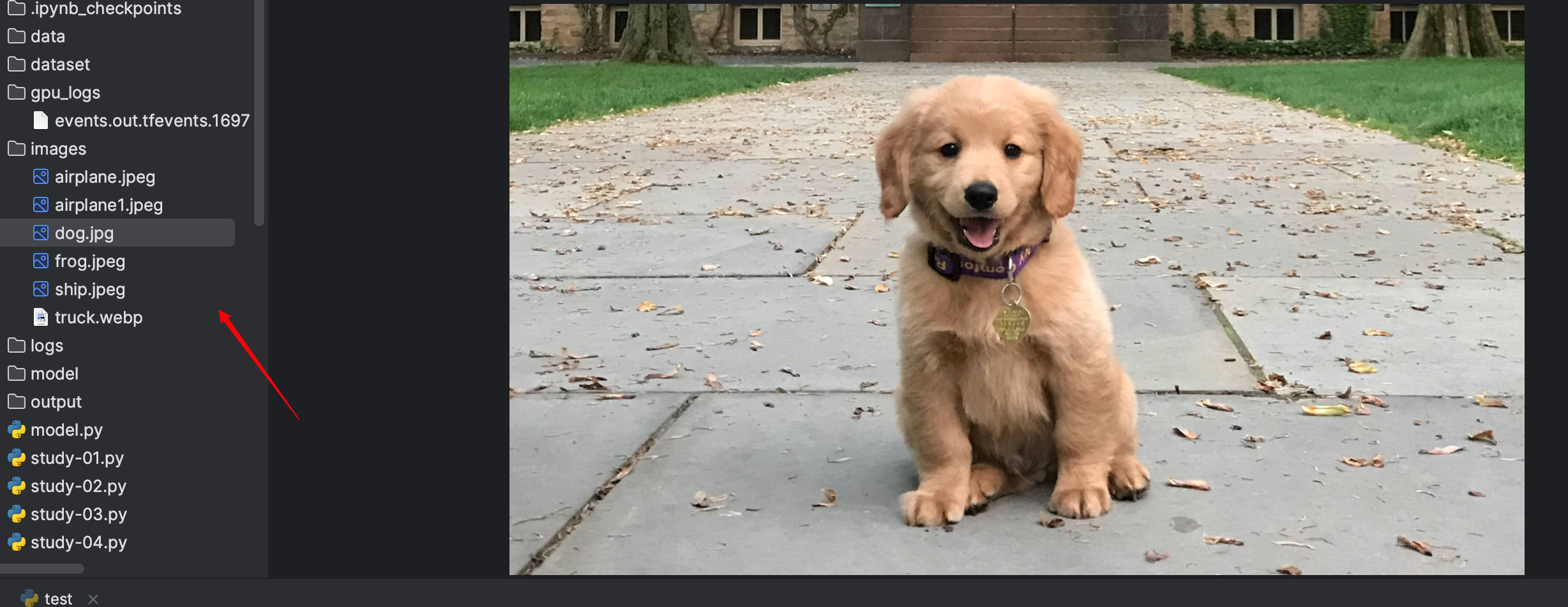
从网上下载几张图片。
import torch
from torchvision import transforms, datasets
from PIL import Image, ImageDraw, ImageFont
from model import Net
import os# 读取数据 为了获取标签
test_dataset = datasets.CIFAR10(root="./dataset",train=False,download=True)
classes = test_dataset.classes# 定义图片变换
transform = transforms.Compose([transforms.Resize((32,32)),transforms.ToTensor()
])# 读取图片
root_dir = "./images"
image_list = os.listdir("./images")
image_tensor_list = []
image_PIL_list = []
for item in image_list:path = os.path.join(root_dir,item)image_PIL = Image.open(path)image_tensor = transform(image_PIL)image_tensor = torch.reshape(image_tensor, (-1, 3, 32, 32))image_tensor = image_tensor.to(device)image_PIL_list.append(image_PIL)image_tensor_list.append(image_tensor)# 读取模型 因为训练时使用的是gpu(mps) 我们测试时要映射为使用cpu进行测试
net = torch.load("./model/net_gpu_43.pth",map_location="cpu")# 测试
num = 0
net.eval()
with torch.no_grad():for item in image_tensor_list:output = net(item)output_index = torch.argmax(output, dim=1)out_text = classes[output_index]# 图片中写入文字H1 = ImageDraw.Draw(image_PIL_list[num])myFont = ImageFont.truetype('/System/Library/Fonts/Times.ttc', size=60)H1.text((30,30),out_text,fill=(255,0,0),font=myFont)image_PIL_list[num].save(os.path.join("./output",str(num)+".jpg"))num = num + 1








![[人工智能-综述-12]:第九届全球软件大会(南京)有感 -1-程序员通过大模型增强自身软件研发效率的同时,也在砸自己的饭碗](https://img-blog.csdnimg.cn/41aab13b3f8a4e9782dbb7b477900288.png)