1. 功能描述
本文示例所实现的功能为:用手机APP,通过WiFi通信遥控R261样机行星探测车移动,以及打开、关闭行星探测车太阳翼。

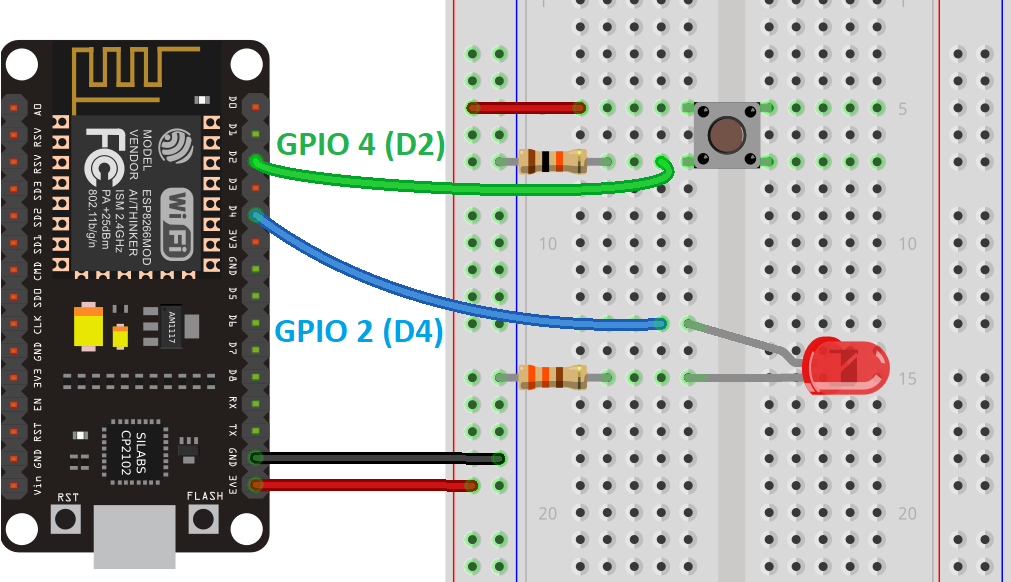
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 通信 | WiFi无线路由器 |
| 2510通信转接板 | |
| 电池 | 7.4V锂电池 |
| 其它 | 摄像头、安卓手机 |
3. 示例程序
编程环境:Arduino 1.8.19
下面提供一个实现WiFi视频遥控行星探测车移动以及打开、关闭行星探测车太阳翼功能的参考程序(Wifi_Control.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-22 https://www.robotway.com/------------------------------*/void serialEvent(){static int i;static boolean revStart;while (Serial.available()){//get data from wifiint inData = Serial.read();if (inData == 0xff && !revStart){revStart = true;}else if(revStart){inputData[i] = inData;i++;if(i > 3){if(inputData[3] == 0xff){dataComplete = true;i = 0;revStart = false;}else{i = 0;revStart = false;}}}}}//小车主程序void car_control(){if(dataComplete){dataComplete = false;//控制小车前,后,左,右if(inputData[0] == 0x00){if(inputData[1] != moveDirection){moveDirection = inputData[1]; }}else if(inputData[0] == 0x02){if(inputData[1] == 0x01){if(inputData[2] != DownDireciton){DownDireciton = inputData[2];if(DownDireciton == 0 && !isPanelDown){expandSolarPanelsAndMast();isPanelDown = true;}else if(DownDireciton == 10 && isPanelDown){stopSolarPanelsAndMast();isPanelDown = false;}}}}Move(moveDirection);}else{//小车自主控制部分automatic_control();}}
4. 安卓手机APP配置及操作
① 将文末资料中的WIFIRobotV1.06.apk下载安装到手机上,并打开按以下参数进行设置。
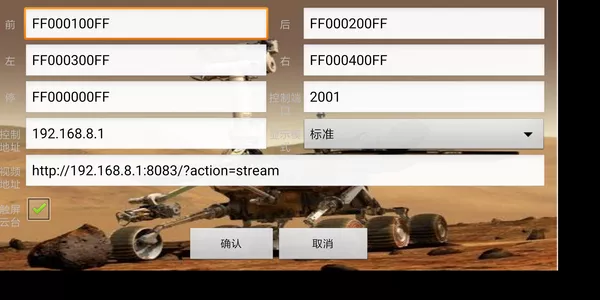
② 打开手机wifi并连接GL-AR150-fxx(xx为随机数字与字母),密码:goodlife
③ 关闭软件(需清除后台应用)重新进入,点击“开始”,并开始操作。
④ 可看到如下所示界面按钮:前、后、左、右。

⑤ 点击“速度调整”:“左侧速度”为调整直流电机转速;“右侧速度”为打开、关闭行星探测车太阳翼。

⑥ 关闭“速度调整”,点击“重力感应”,通过调整手机角度可使行星探测车移动。
程序源代码及样机3D文件等资料下载地址:行星探测车-WiFi视频遥控