一、简述
2022 年,特斯拉宣布即将在其车辆中发布全新算法。该算法被称为occupancy networks,它应该是对Tesla 的HydraNet 的改进。
自动驾驶汽车行业在技术上分为两类:基于视觉的系统和基于激光雷达的系统。后者使用激光传感器来确定物体的存在和距离,而视觉系统则纯粹基于相机。特斯拉的Tesla Vision就是单纯的基于视觉实现。
但基于视觉的系统存在很多缺陷,并且仍然面临着许多由物体检测失败或其他问题引起的崩溃。
如果您看到不属于数据集的对象怎么办?在基于激光雷达的系统中,您可以通过激光检测来物理确定物体的存在,但在摄像头系统中,您必须首先使用神经网络检测物体。
仅仅因为这一点,就造成了很多麻烦。在 CVPR(计算机视觉和模式识别)2022 上,特斯拉自动驾驶新负责人推出了一种新型算法,名为:occupancy networks。
二、occupancy networks
在“经典网络”中遇到很多问题,遮挡物的问题,结构是2D的等等,占用网络是一种不同类型的算法,基于名为占用网格映射的机器人学思想;它包括将世界划分为网格单元,然后定义哪个单元被占用,哪个单元空闲。
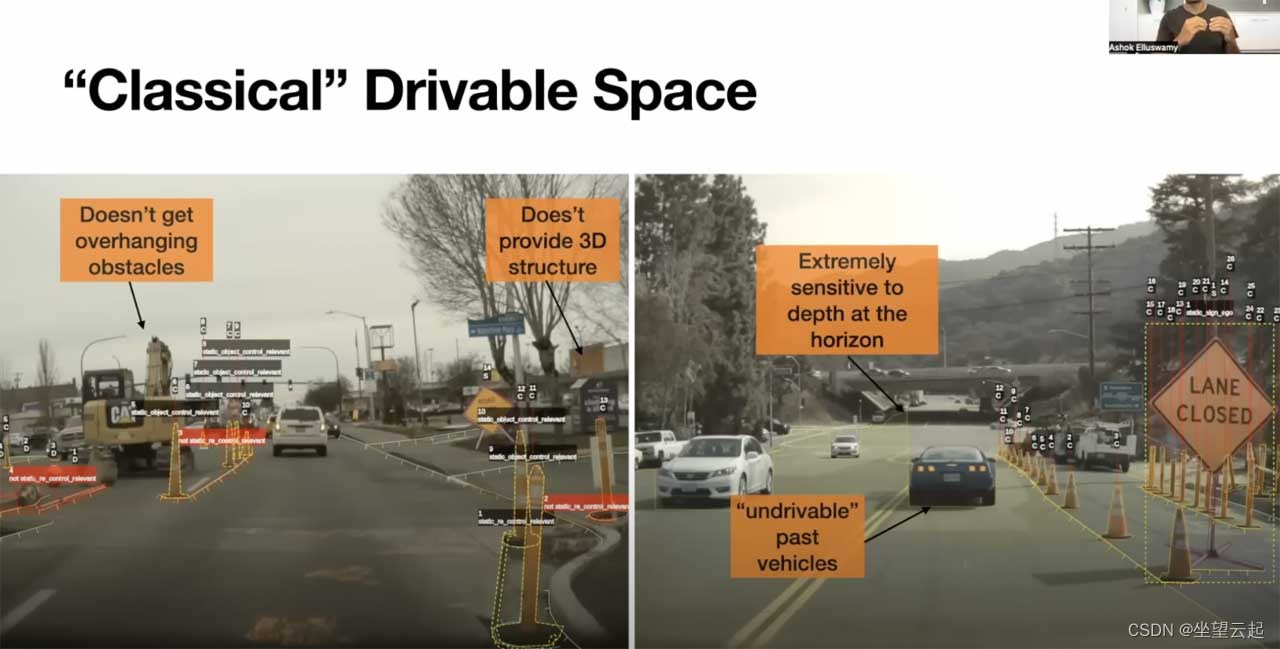
上图是代表传统的经典网络所识别的物体。
占用网络的思路是获得体积占