使用块的网络 - VGG。
使用多个 3 × 3 3\times 3 3×3的要比使用少个 5 × 5 5\times 5 5×5的效果要好。
VGG全称是Visual Geometry Group,因为是由Oxford的Visual Geometry Group提出的。AlexNet问世之后,很多学者通过改进AlexNet的网络结构来提高自己的准确率,主要有两个方向:小卷积核和多尺度。而VGG的作者们则选择了另外一个方向,即加深网络深度。
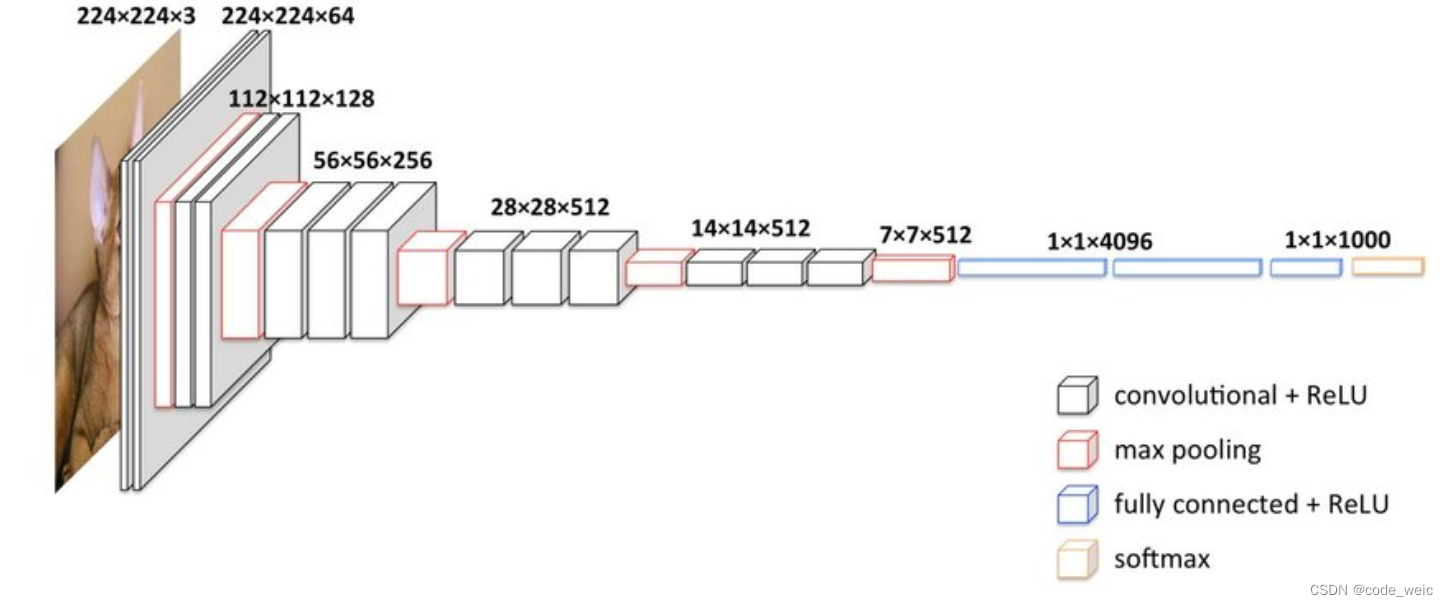
网络架构
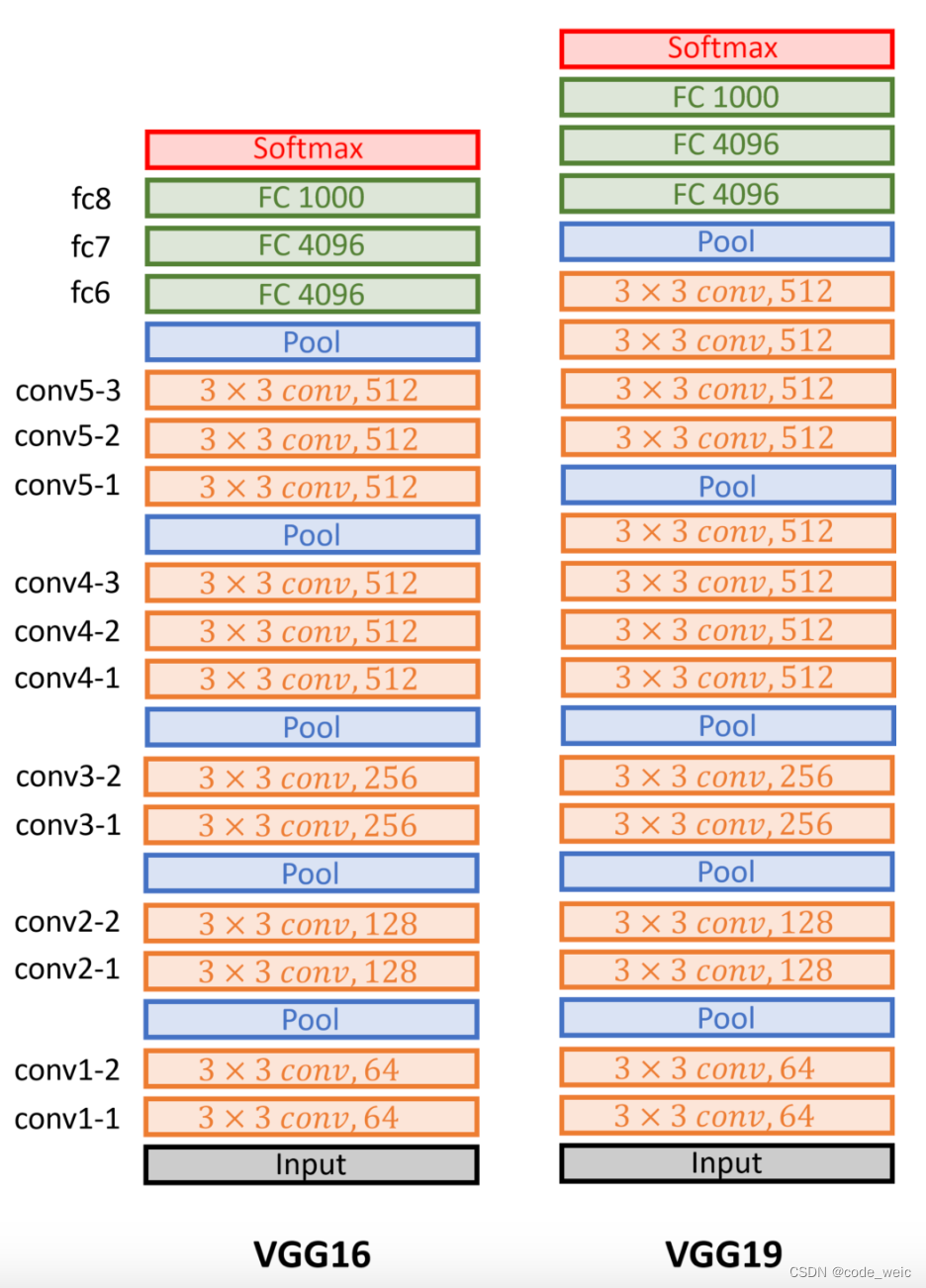
卷积网络的输入是224 * 224的RGB图像,整个网络的组成是非常格式化的,基本上都用的是3 * 3的卷积核以及 2 * 2的max pooling,少部分网络加入了1 * 1的卷积核。因为想要体现出“上下左右中”的概念,3*3的卷积核已经是最小的尺寸了。
VGG16相比之前网络的改进是3个33卷积核来代替7x7卷积核,2个33卷积核来代替5*5卷积核,这样做的主要目的是在保证具有相同感知野的条件下,减少参数,提升了网络的深度。
多个VGG块后接全连接层。
不同次数的重复块得到不同的架构,如VGG-16,VGG-19等。
VGG:更大更深的AlexNet。
总结:
- VGG使用可重复使用的卷积块来构建深度卷积神经网络
- 不同的卷积块个数和超参数可以得到不同复杂度的变种
代码实现
使用数据集CIFAR
model.py
import torch
from torch import nnclass Vgg16(nn.Module):def __init__(self, *args, **kwargs) -> None:super().__init__(*args, **kwargs)self.model = nn.Sequential(nn.Conv2d(3,64,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(64,64,kernel_size=3,padding=1),nn.ReLU(),nn.MaxPool2d(2,2),nn.Conv2d(64,128,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(128,128,kernel_size=3,padding=1),nn.ReLU(),nn.MaxPool2d(2,2),nn.Conv2d(128,256,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(256,256,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(256,256,kernel_size=3,padding=1),nn.ReLU(),nn.MaxPool2d(2,2),nn.Conv2d(256,512,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(512,512,kernel_size=3,padding=1),nn.ReLU(),nn.Conv2d(512,512,kernel_size=3,padding=1),nn.ReLU(),nn.MaxPool2d(2,2),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(),nn.Conv2d(512, 512, kernel_size=3, padding=1),nn.ReLU(),nn.MaxPool2d(2,2),nn.Flatten(),nn.Linear(7*7*512,4096),nn.Dropout(0.5),nn.Linear(4096,4096),nn.Dropout(0.5),nn.Linear(4096,10))def forward(self,x):return self.model(x)# 验证模型正确性
if __name__ == '__main__':net = Vgg16()x = torch.ones((64,3,244,244))output = net(x)print(output)
train.py
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torchvision import datasets
from torchvision.transforms import transforms
from model import Vgg16# 扫描数据次数
epochs = 3
# 分组大小
batch = 64
# 学习率
learning_rate = 0.01
# 训练次数
train_step = 0
# 测试次数
test_step = 0# 定义图像转换
transform = transforms.Compose([transforms.Resize(224),transforms.ToTensor()
])
# 读取数据
train_dataset = datasets.CIFAR10(root="./dataset",train=True,transform=transform,download=True)
test_dataset = datasets.CIFAR10(root="./dataset",train=False,transform=transform,download=True)
# 加载数据
train_dataloader = DataLoader(train_dataset,batch_size=batch,shuffle=True,num_workers=0)
test_dataloader = DataLoader(test_dataset,batch_size=batch,shuffle=True,num_workers=0)
# 数据大小
train_size = len(train_dataset)
test_size = len(test_dataset)
print("训练集大小:{}".format(train_size))
print("验证集大小:{}".format(test_size))# GPU
device = torch.device("mps" if torch.backends.mps.is_available() else "cpu")
print(device)
# 创建网络
net = Vgg16()
net = net.to(device)
# 定义损失函数
loss = nn.CrossEntropyLoss()
loss = loss.to(device)
# 定义优化器
optimizer = torch.optim.SGD(net.parameters(),lr=learning_rate)writer = SummaryWriter("logs")
# 训练
for epoch in range(epochs):print("-------------------第 {} 轮训练开始-------------------".format(epoch))net.train()for data in train_dataloader:train_step = train_step + 1images,targets = dataimages = images.to(device)targets = targets.to(device)outputs = net(images)loss_out = loss(outputs,targets)optimizer.zero_grad()loss_out.backward()optimizer.step()if train_step%100==0:writer.add_scalar("Train Loss",scalar_value=loss_out.item(),global_step=train_step)print("训练次数:{},Loss:{}".format(train_step,loss_out.item()))# 测试net.eval()total_loss = 0total_accuracy = 0with torch.no_grad():for data in test_dataloader:test_step = test_step + 1images, targets = dataimages = images.to(device)targets = targets.to(device)outputs = net(images)loss_out = loss(outputs, targets)total_loss = total_loss + loss_outaccuracy = (targets == torch.argmax(outputs,dim=1)).sum()total_accuracy = total_accuracy + accuracy# 计算精确率print(total_accuracy)accuracy_rate = total_accuracy / test_sizeprint("第 {} 轮,验证集总损失为:{}".format(epoch+1,total_loss))print("第 {} 轮,精确率为:{}".format(epoch+1,accuracy_rate))writer.add_scalar("Test Total Loss",scalar_value=total_loss,global_step=epoch+1)writer.add_scalar("Accuracy Rate",scalar_value=accuracy_rate,global_step=epoch+1)torch.save(net,"./model/net_{}.pth".format(epoch+1))print("模型net_{}.pth已保存".format(epoch+1))