62.不同路径
思路
动态规划
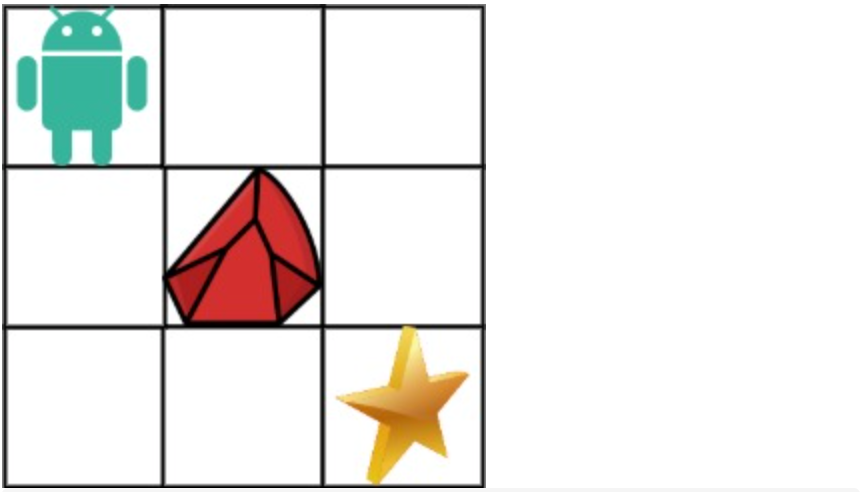
机器人从(0 , 0) 位置出发,到(m - 1, n - 1)终点。
按照动规五部曲来分析:
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
想要求dp[i][j],只能有两个方向来推导出来,即dp[i - 1][j] 和 dp[i][j - 1]。
此时在回顾一下 dp[i - 1][j] 表示啥,是从(0, 0)的位置到(i - 1, j)有几条路径,dp[i][j - 1]同理。
那么很自然,dp[i][j] = dp[i - 1][j] + dp[i][j - 1],因为dp[i][j]只有这两个方向过来。
- dp数组的初始化
如何初始化呢,首先dp[i][0]一定都是1,因为从(0, 0)的位置到(i, 0)的路径只有一条,那么dp[0][j]也同理。
所以初始化代码为:
//初始化dp[][],将最上和最左初始化为1
for (int i = 0; i < m; i++) {dp[i][0] = 1;for (int j = 0; j < n; j++) {dp[0][j]=1;}
}- 确定遍历顺序
这里要看一下递推公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1],dp[i][j]都是从其上方和左方推导而来,那么从左到右一层一层遍历就可以了。
这样就可以保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值的。
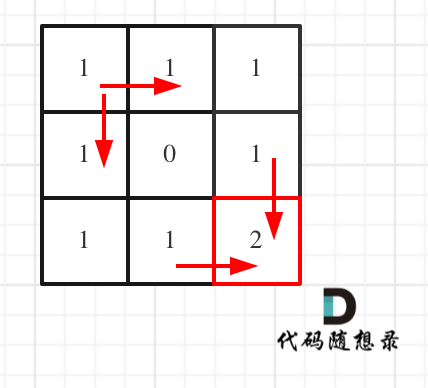
- 举例推导dp数组
如图所示:
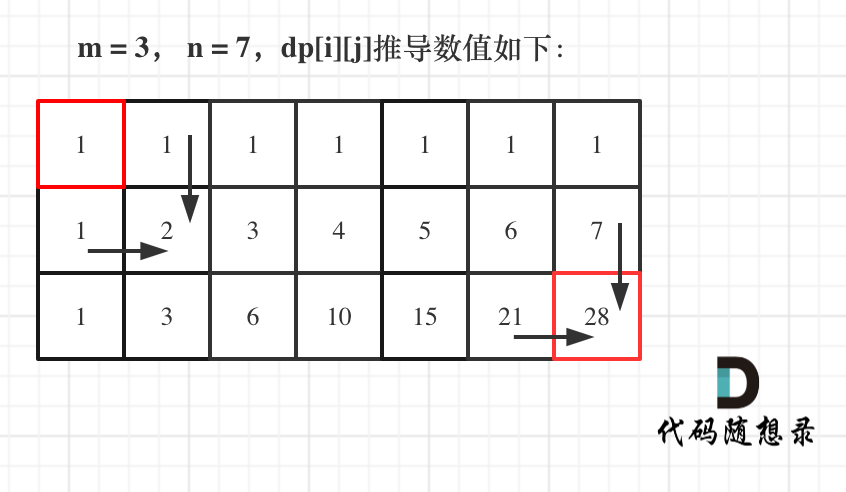
以上动规五部曲分析完毕,代码如下:
class Solution {public int uniquePaths(int m, int n) {//确定dp数组int[][] dp = new int[m][n];//确定递推公式【状态转移方程】:dp[i][j] = dp[i-1][0] + dp[0][j-1]//初始化dp[][],将最上和最左初始化为1for (int i = 0; i < m; i++) {dp[i][0] = 1;for (int j = 0; j < n; j++) {dp[0][j]=1;}}//确定遍历顺序,从左到右for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {dp[i][j] = dp[i-1][j] + dp[i][j-1];}}return dp[m-1][n-1];}
}- 时间复杂度:O(m × n)
- 空间复杂度:O(m × n)
63. 不同路径 II
思路
这道题相对于62.不同路径 (opens new window)就是有了障碍。
62.不同路径 (opens new window)中已经详细分析了没有障碍的情况,有障碍的话,其实就是标记对应的dp table(dp数组)保持初始值(0)就可以了。
动规五部曲:
- 确定dp数组(dp table)以及下标的含义
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
递推公式和62.不同路径一样,dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
但这里需要注意一点,因为有了障碍,(i, j)如果就是障碍的话应该就保持初始状态(初始状态为0)。
所以代码为:
int a = obstacleGrid[i-1][j] == 1 ? 0 : dp[i-1][j];
int b = obstacleGrid[i][j-1] == 1 ? 0 : dp[i][j-1];
dp[i][j] = a + b;- dp数组如何初始化
在62.不同路径 (opens new window)不同路径中我们给出如下的初始化:
for (int i = 0; i < m; i++) {dp[i][0] = 1;for (int j = 0; j < n; j++) {dp[0][j]=1;}
}因为从(0, 0)的位置到(i, 0)的路径只有一条,所以dp[i][0]一定为1,dp[0][j]也同理。
但如果(i, 0) 这条边有了障碍之后,障碍之后(包括障碍)都是走不到的位置了,所以障碍之后的dp[i][0]应该还是初始值0。
如图:
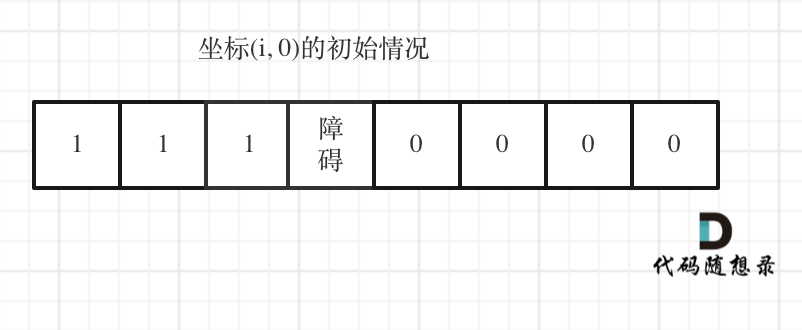
下标(0, j)的初始化情况同理。
所以本题初始化代码为:
for (int i = 0; i < m; i++) {if (obstacleGrid[i][0] == 1){break;}dp[i][0] = 1;for (int j = 0; j < n; j++) {if (obstacleGrid[0][j] == 1){break;}dp[0][j]=1;}
}- 确定遍历顺序
从递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1] 中可以看出,一定是从左到右一层一层遍历,这样保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值。
代码如下:
//确定遍历顺序
for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {int a = obstacleGrid[i-1][j] == 1 ? 0 : dp[i-1][j];int b = obstacleGrid[i][j-1] == 1 ? 0 : dp[i][j-1];dp[i][j] = a + b;}
}- 举例推导dp数组
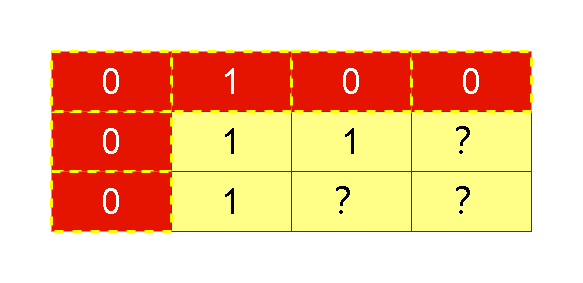
拿示例1来举例如题:
对应的dp table 如图:
如果这个图看不懂,建议再理解一下递归公式,然后照着文章中说的遍历顺序,自己推导一下!
动规五部分分析完毕,代码如下:
class Solution {public int uniquePathsWithObstacles(int[][] obstacleGrid) {//确定dp数组,及其下标含义int m = obstacleGrid.length;int n = obstacleGrid[0].length;//当起始位置或者终点有障碍时,直接返回if (obstacleGrid[m-1][n-1] == 1 || obstacleGrid[0][0] == 1){return 0;}int[][] dp = new int[m][n];//确定递推公式//数组初始化,当遇到障碍直接跳出循环for (int i = 0; i < m; i++) {if (obstacleGrid[i][0] == 1){break;}dp[i][0] = 1;for (int j = 0; j < n; j++) {if (obstacleGrid[0][j] == 1){break;}dp[0][j]=1;}}//确定遍历顺序for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {int a = obstacleGrid[i-1][j] == 1 ? 0 : dp[i-1][j];int b = obstacleGrid[i][j-1] == 1 ? 0 : dp[i][j-1];dp[i][j] = a + b;}}return dp[m-1][n-1];}
}
- 时间复杂度:O(n × m),n、m 分别为obstacleGrid 长度和宽度
- 空间复杂度:O(n × m)
今天感觉不错,再接再厉!!!