文章目录
- 概要
- 图像梯度
- Canny边缘检测
- 小结
概要
OpenCV中,可以使用各种函数实现图像梯度和Canny边缘检测,这些操作对于图像处理和分析非常重要。
图像梯度通常用于寻找图像中的边缘和轮廓。在OpenCV中,可以使用cv2.Sobel()函数计算图像的梯度,该函数可以计算图像在水平和垂直方向上的梯度。梯度的方向和大小可以帮助理解图像中的边缘信息。
Canny边缘检测是一种经典的边缘检测算法,它通过多个步骤来检测图像中的边缘。首先,Canny算法使用Sobel算子计算图像的梯度。然后,它通过非极大值抑制(Non-Maximum Suppression)来细化边缘。接着,Canny算法使用双阈值(Double Thresholding)来检测强边缘和弱边缘,并通过连接强边缘来得到最终的边缘图像。Canny边缘检测在图像处理中被广泛应用,因为它能够准确地检测出图像中的边缘。
在OpenCV中,可以使用cv2.Sobel()函数计算图像的梯度,而Canny边缘检测则可以通过cv2.Canny()函数实现。通过这些函数,可以方便地在OpenCV中实现图像梯度和Canny边缘检测,进而进行各种图像分析和处理任务。
图像梯度
寻找图像梯度,边缘等等。
函数:cv.Sobel(), cv.Scharr(), cvLaplacian() 等等。
Sobel和Scharr导数:
Sobel算子是一种结合了高斯平滑和微分操作的滤波器,因此它对图像中的噪声具有较好的抵抗能力。使用Sobel算子时,可以指定所需导数的方向,通过参数yorder和xorder来确定是垂直方向还是水平方向的导数。此外,还可以通过参数ksize指定核(kernel)的大小。当ksize设为-1时,OpenCV会使用3×3的Scharr滤波器,其结果通常比3×3的Sobel滤波器更为精确。
拉普拉斯导数
它计算了由关系式给出的图像的拉普拉斯算子,其中关系式为
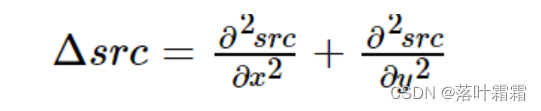
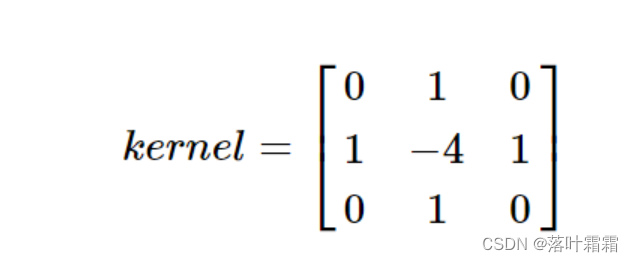
其中每一个导数都是用 Sobel 导数找到的。如果 ksize = -1,滤波器会使用下面这个内核。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt# 读取图像
img = cv.imread('dave.jpg', 0)# 计算拉普拉斯边缘
laplacian = cv.Laplacian(img, cv.CV_64F)# 计算Sobel边缘(x和y方向)
sobelx = cv.Sobel(img, cv.CV_64F, 1, 0, ksize=5)
sobely = cv.Sobel(img, cv.CV_64F, 0, 1, ksize=5)# 绘制原始图像
plt.subplot(2, 2, 1), plt.imshow(img, cmap='gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])# 绘制拉普拉斯边缘图像
plt.subplot(2, 2, 2), plt.imshow(laplacian, cmap='gray')
plt.title('Laplacian'), plt.xticks([]), plt.yticks([])# 绘制Sobel X边缘图像
plt.subplot(2, 2, 3), plt.imshow(sobelx, cmap='gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])# 绘制Sobel Y边缘图像
plt.subplot(2, 2, 4), plt.imshow(sobely, cmap='gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])# 显示图像
plt.show()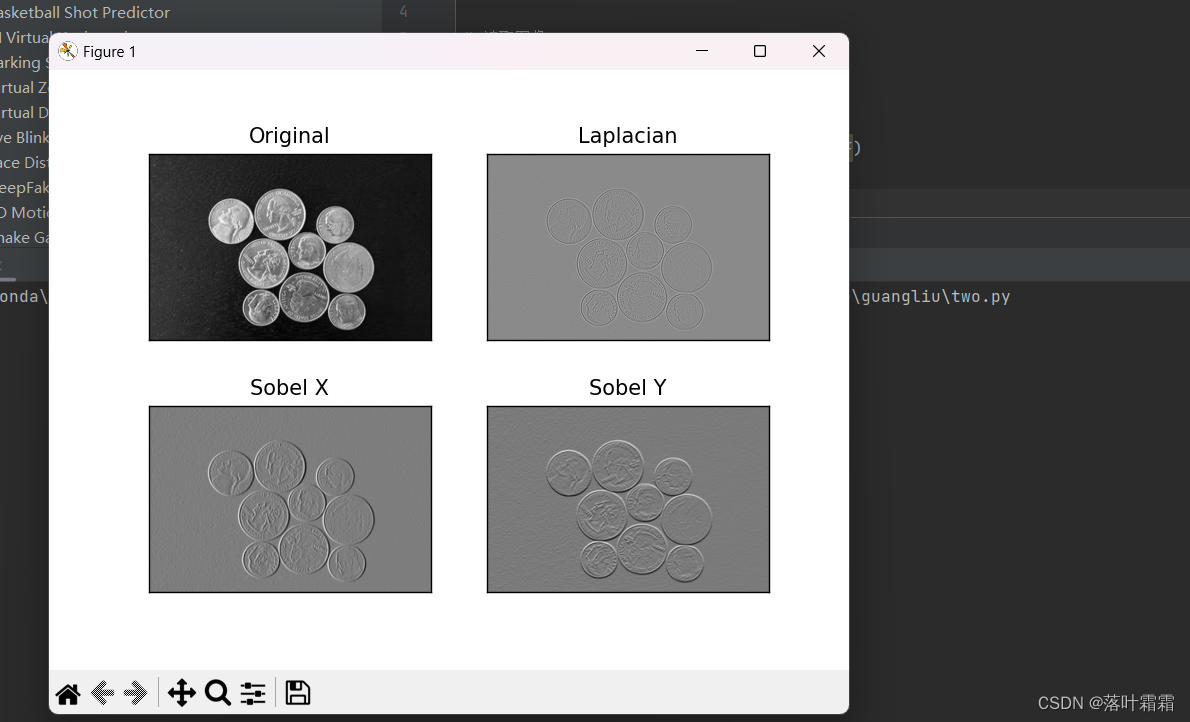
在我们的最后一个例子中,我们使用了Sobel滤波器来检测图像中的边缘。然而,当我们将输出数据类型转换为cv.CV_8U或者np.uint8时,存在一个小问题。在图像中,从黑色到白色的过渡被视为正斜率(它具有正值),而从白色到黑色的过渡被视为负斜率(它具有负值)。因此,当我们将数据类型转换为np.uint8时,所有负斜率都被截断为0,也就是说,我们会错过所有负斜率对应的边缘。
如果我们希望找到所有的边缘,更好的方法是将输出的数据类型保持在一个更高的精度范围内,例如cv.CV_16S、cv.CV_64F等,然后取其绝对值,最后再转换回cv.CV_8U类型。下面的代码演示了这个过程,特别是在处理水平Sobel滤波器时,以及结果的差异。
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt# 读取灰度图像
img = cv.imread('img.png', 0)# 使用Sobel滤波器,输出数据类型为cv.CV_8U
sobelx8u = cv.Sobel(img, cv.CV_8U, 1, 0, ksize=5)# 使用Sobel滤波器,输出数据类型为cv.CV_64F,然后取绝对值并转换为cv.CV_8U
sobelx64f = cv.Sobel(img, cv.CV_64F, 1, 0, ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)# 显示原始图像、Sobel输出(cv.CV_8U)和Sobel绝对值(cv.CV_64F)
plt.subplot(1, 3, 1), plt.imshow(img, cmap='gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 2), plt.imshow(sobelx8u, cmap='gray')
plt.title('Sobel CV_8U'), plt.xticks([]), plt.yticks([])
plt.subplot(1, 3, 3), plt.imshow(sobel_8u, cmap='gray')
plt.title('Sobel abs(CV_64F)'), plt.xticks([]), plt.yticks([])# 显示图像
plt.show()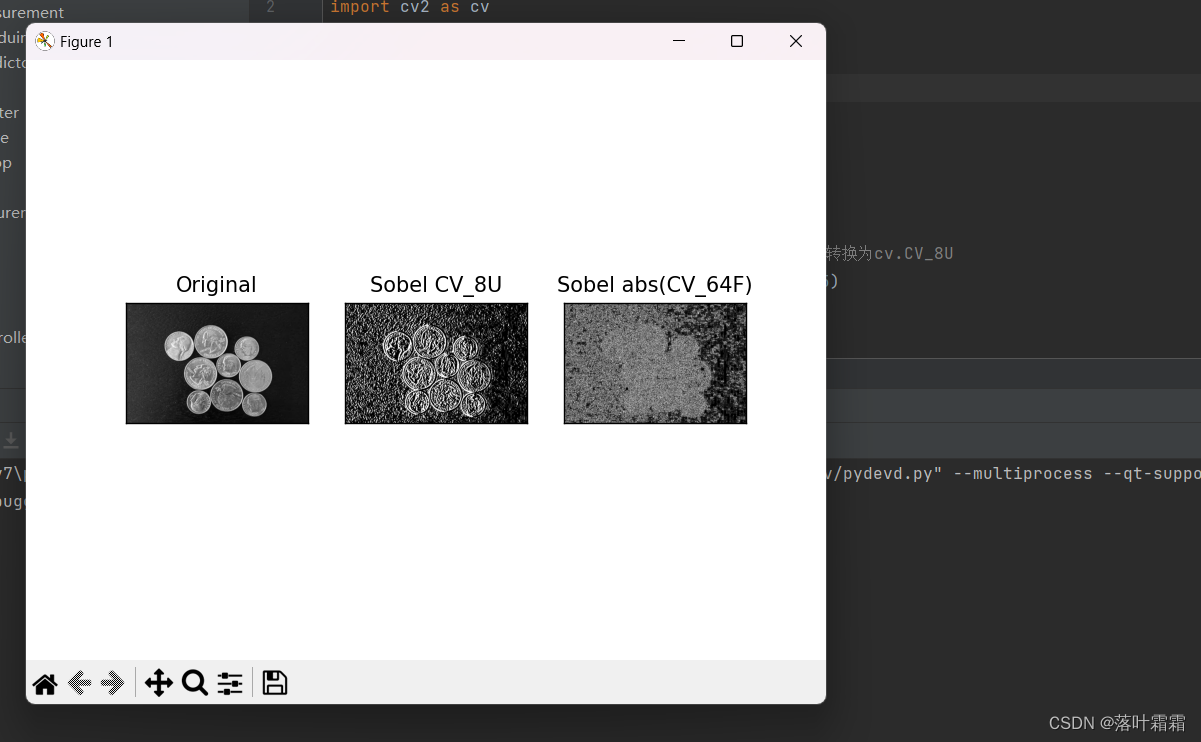
Canny边缘检测
Canny边缘检测的概念
OpenCV函数:cv.Canny()
Canny边缘检测是一种广泛应用的边缘检测算法,由John F. Canny开发而成。该算法包含多个阶段,下面我们将详细介绍每个阶段的过程:
噪声减少:
由于边缘检测对图像中的噪声非常敏感,第一步是通过一个5X5的高斯滤波器对图像进行平滑处理,以去除噪声。寻找图像中的变化(梯度)强度:
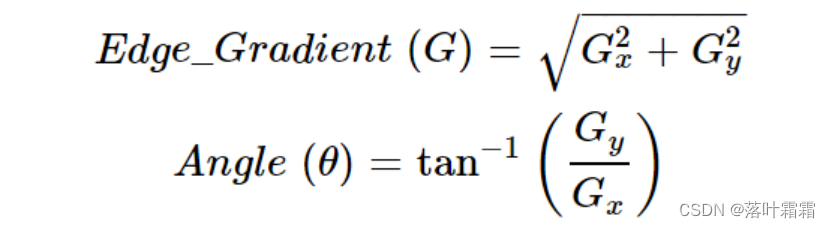
接下来,使用Sobel核在水平和垂直方向上对平滑后的图像进行滤波,得到水平方向($G_x$)和垂直方向($G_y$)的一阶导数。通过这两个导数,我们可以计算每个像素点的边缘梯度幅值和方向。梯度方向始终与边缘垂直,通常近似为水平、垂直和两个对角线方向中的一个。
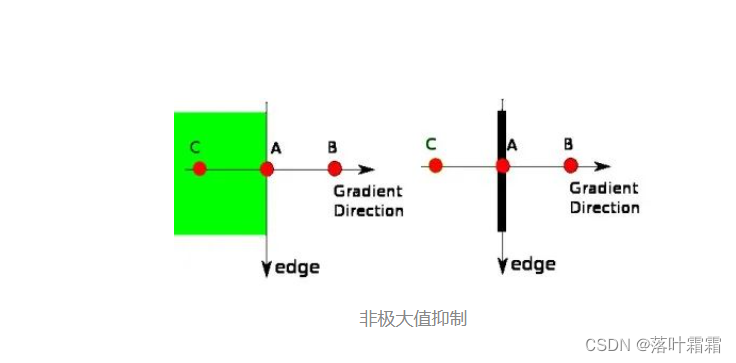
非极大值抑制:
在得到梯度大小和方向之后,在每个像素点上进行全图扫描。对于每个像素,检查其梯度值是否在相邻像素中是最大的。如果是,保留该值,否则将其置为0。这一步骤产生了一个"薄边"的二值图像。
滞后阈值:
在此阶段,我们需要确定哪些边缘是真实的,哪些是噪声或者假的。为此,我们使用两个阈值,minVal(最小值)和maxVal(最大值)。所有强度大于maxVal的边缘被视为真正的边缘,低于minVal的被丢弃。介于两者之间的边缘会基于连通性来判断是否为边缘。如果它们与确定的边缘相连,则保留,否则被抛弃。这一步骤也基于边缘是长线的假设来去除小的像素噪声。
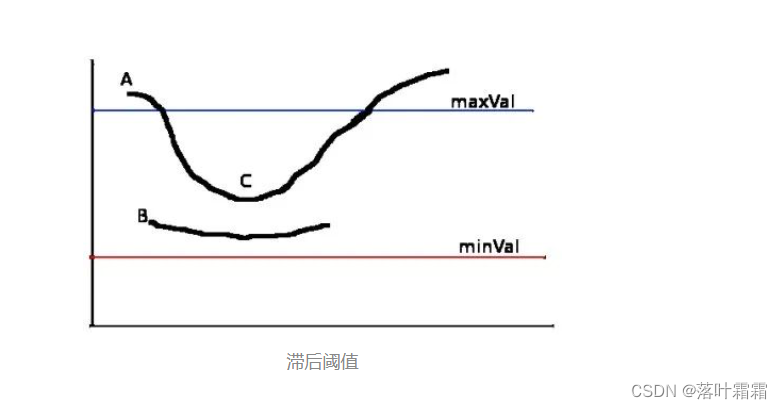
边缘 A 因为在 maxVal 上面,所以是肯定的边缘。尽管边缘 C 的位置在 maxVal 下面,但是因为它和边缘 A 相连接,所以我们认为它也是个有效边缘,如此得到了一条完整的曲线。但是对于边缘 B 来说,哪怕它在 minVal 上面,和边缘 C 处在同一个区域上,可是它并不和任何一条有效边缘连接,所以会被丢弃。所以,为了得到正确的结果,我们需要确定好 minVal 和 maxVal 的值。
最终,经过这些步骤,我们就能得到一条完整的边缘在图像中。
OpenCV中的Canny边缘检测
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt# 读取灰度图像
img = cv.imread('img.png', 0)# 使用Canny边缘检测算法,阈值设置为100和200
edges = cv.Canny(img, 100, 200)# 显示原始图像和Canny边缘检测结果
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])plt.subplot(122), plt.imshow(edges, cmap='gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])plt.show()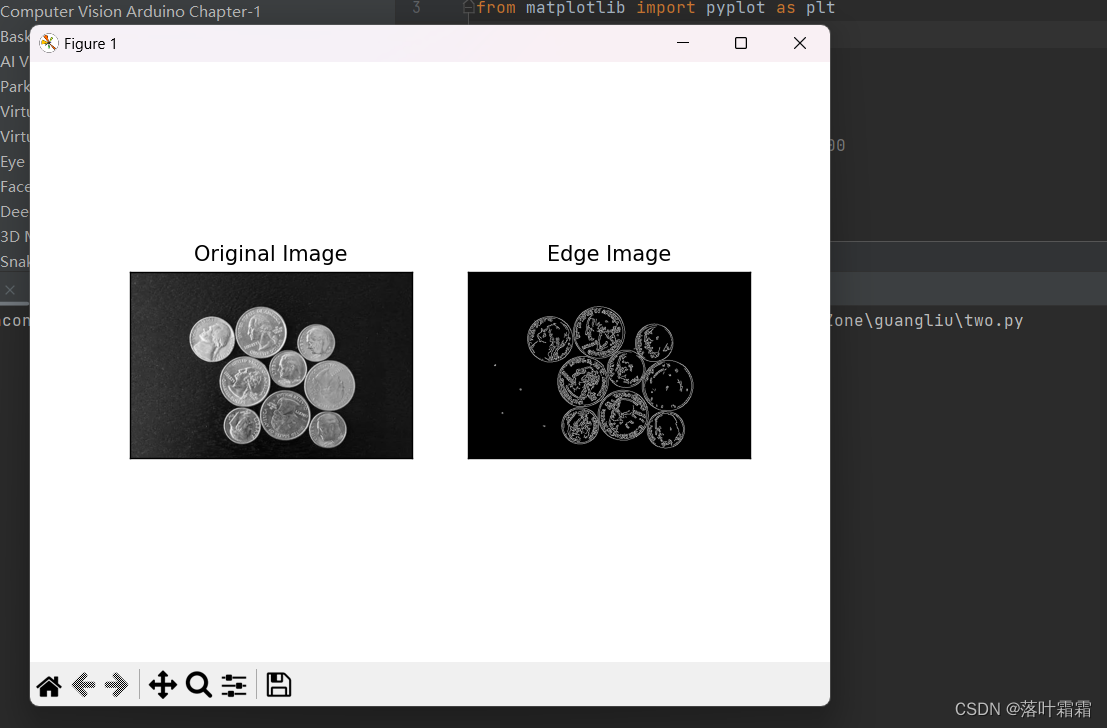
小结
图像梯度:
OpenCV提供了多种方法来计算图像的梯度,包括Sobel、Scharr和拉普拉斯滤波器。
Sobel算子是一种联合高斯平滑和微分操作的滤波器,可以计算图像在水平和垂直方向上的梯度。
使用Sobel算子时,你可以指定所需导数的方向(水平或垂直)以及核的大小。
拉普拉斯滤波器用于计算图像的拉普拉斯算子,通过将图像的二阶导数与Sobel导数相关联来实现。
Canny边缘检测:
Canny边缘检测是一种多阶段算法,用于检测图像中的边缘。
第一阶段是噪声减少,通常通过应用高斯滤波器来实现,以平滑图像并减少噪声。
第二阶段是计算图像的梯度,通常使用Sobel滤波器,以获得图像的水平和垂直梯度。
接下来进行非极大值抑制,以去除可能不构成边缘的像素,仅保留边缘像素。
最后一个阶段是滞后阈值,需要设置两个阈值(minVal和maxVal),以确定哪些边缘是真实的。根据这些阈值,边缘可能被分类为强边缘、弱边缘或非边缘,并进行相应的处理。