文章目录
- openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
- 概述
- 笔记
- 重复数字IO的问题
- 想法
- 手工实现
- 程序实现
- 确定要摘掉的数字重合线
- 自动化测试的问题
- 测试程序的场景
- 测试程序的运行效果
- 测试程序实现
- 备注
- END
openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
概述
飞达程序编写的笔记(openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144)实现)没写完, 博客编辑时, 卡的厉害, 在这个笔记中继续写.
主要是设备挂满飞达场景下的测试, 确实测试出一些问题, 并加以解决.
笔记
重复数字IO的问题
将飞达全部挂上, 测试时, 发现有的飞达通讯卡顿. 好多次才会偶尔通讯成功一次.
看串口调试日志, 发现中间步骤的回包不对.
因为我单独测试(设备上只挂一个飞达, 插入每个航插端子, 进行各种命令的测试)是好的, 通讯质量刚刚的.
开始以为是西门子二手飞达有问题, 但是单独测试又是好的.
后来发现是主控板STM32_NUCLEO-144板子上, 有一些数字IO是连在一起的. 导致飞达都挂上时, 通过一个数字IO通讯, 实际上是由多个飞达同时回包的, 导致回包数据被冲乱.
现在已经发现有2个数字IO是这样的.
官方图纸如果一个IO一个IO的看, 中间有跳线, 不容易看. 主要不是自己画的, 看起来太费劲.
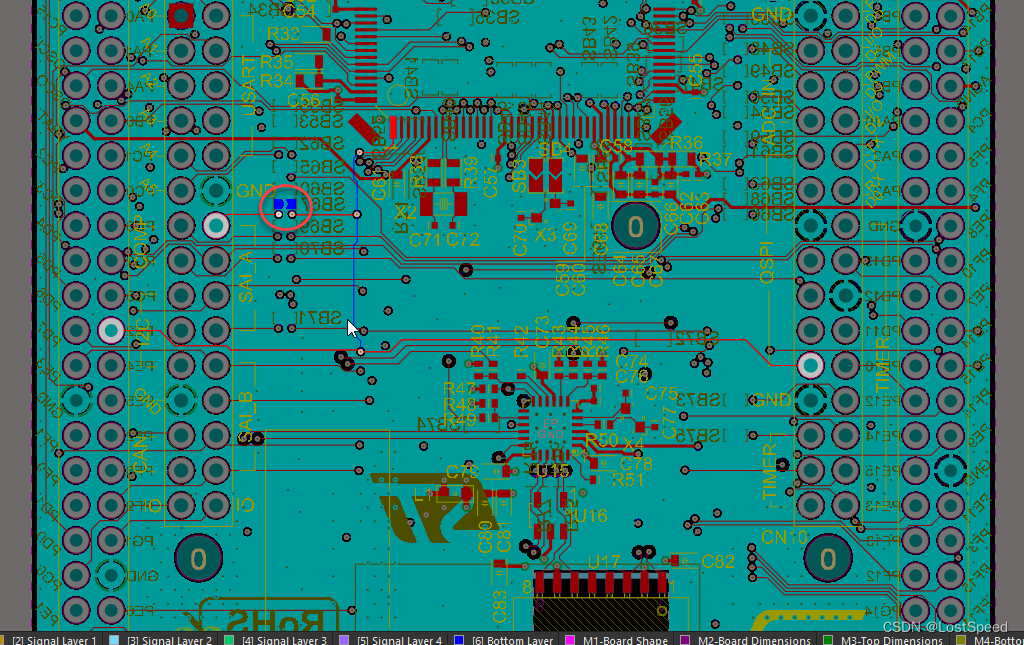
想个办法, 将一个数字IO号码联通多个数字IO端子的情况排查出来. 重复的数字IO端子就留一个接上飞达.
想法
写个测试程序吧
硬件方面, 将飞达都取下来.
逻辑如下:
- 先将所有数字IO设置为内部上拉, 这样读取时, 默认就是H
- 再将一个数字IO设置为L, 去读剩下所有的数字IO, 如果哪个为L, 就说明这2个数字IO是在硬件电路上连在一起的.
- 将所有数字IO都过一遍, 就知道所有重复数字IO.
- 然后在重复的数字IO上, 只挂一个飞达, 就可以解决这个问题.
手工实现
如果想确认一个飞达确实只有一个数字IO来控制, 是非常麻烦的, 非人力所能为.
用手工找出2对.
测试前, 先将飞达都挂上, 给第一个飞达发命令, 必须有快速流畅的回答.连续实验10次. 如果发现回包时有时无, 而且看到串口调试日志上有回包msglen长度不对的提示, 那就有可能是多个飞达被主板连在一起, 一个数字IO可以控制多个飞达.
然后将该飞达摘掉.
再给该飞达的数字IO发同样的命令, 如果有回答, 那就说明这个数字IO上有多余一把的飞达.
摘掉剩下的一把飞达, 再发包给同样的数字IO, 看有没有回包, 如果没有回包了, 那么最后摘掉的那个飞达所在的数字IO, 就在主板上和当前测试的这个数字IO连在一起了.
如果找到了疑似的重合的数字IO, 再将最后拔掉的飞达插上, 如果有回包了, 那就找到了.
这好麻烦, 如果是2个以上的数字IO重合了, 那可咋整?
必须写测试程序来干这事啊.
程序实现
花了1个小时, 写好了测试程序. 跑了一下, 花了3秒钟.
居然找到5对数字IO重合.
我开始手工找到的那2对数字IO重合的线, 就在程序找出的这5对线之中.
还好写程序找到了, 否则存在数字IO重合问题, 就会影响通讯质量. 一旦通讯失败, openpnp任务就停了.
// @file FindSameDigtalIO
// @note run result below
/*
>> FindSameDigtalIO
------------------------------------------------------------
digtial IO io_sn below:0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 192 193 194 195 196 197 198 199 200
------------------------------------------------------------
find_same_digtial_io
D22 = D11 = 0
D56 = D31 = 0
D59 = D38 = 0
D71 = D6 = 0
D72 = D27 = 0
err - find connect pins = 5
END, dead loop*/#define ENABLE_UART_DEBUG_PRINT
#define UART_LOG_LEVEL_INFO 0
#define LINE_60 "------------------------------------------------------------"int UartDebugPrintf(uint8_t log_level, const char *format, ...);void setup() {//start serial connectionSerial.begin(115200);//configure pin 2 as an input and enable the internal pull-up resistor// pinMode(2, INPUT_PULLUP);// pinMode(13, OUTPUT);UartDebugPrintf(UART_LOG_LEVEL_INFO, ">> FindSameDigtalIO\r\n");
}int get_digtial_io_cnt();
int get_digtial_io_sn(int iPosition);
void show_all_digtial_io_value();
void find_same_digtial_io();
int find_same_digtial_io(int ipos);void loop() {// 数字IO范围 D0 ~ D72, A0 ~A8// 数字IO的值范围 0 ~ 72, 0xC0 ~ 0xC8// //// //read the pushbutton value into a variable// int sensorVal = digitalRead(2);// //print out the value of the pushbutton// Serial.println(sensorVal);// // Keep in mind the pull-up means the pushbutton's logic is inverted. It goes// // HIGH when it's open, and LOW when it's pressed. Turn on pin 13 when the// // button's pressed, and off when it's not:// if (sensorVal == HIGH) {// digitalWrite(13, LOW);// } else {// digitalWrite(13, HIGH);// }show_all_digtial_io_value();find_same_digtial_io();UartDebugPrintf(UART_LOG_LEVEL_INFO, "END, dead loop\r\n");do {delay(1);} while (true);
}int UartDebugPrintf(uint8_t log_level, const char *format, ...) {
#ifndef ENABLE_UART_DEBUG_PRINTreturn -1;
#elseint iRc = 0;char szBuf[0x100];va_list args;switch (log_level) {// @info 如果要屏蔽哪一级的日志, 就将日志级别放在case中// 屏蔽case到的日志级别// case UART_LOG_LEVEL_INFO:// {// return -1;// }// break;default:break;}if (NULL == format) {return -1;}memset(szBuf, 0, sizeof(szBuf));va_start(args, format);iRc = vsnprintf(szBuf, sizeof(szBuf) - 1, format, args);va_end(args);if (iRc <= 0) {return iRc;}return Serial.printf(szBuf);
#endif // #ifdef FLAG_UART_DEBUG_PRINT
}const int g_digtial_io_cnt = ((72 - 0 + 1) + (0xA8 - 0xA0 + 1));
int get_digtial_io_cnt() {// 数字IO范围 D0 ~ D72, A0 ~A8// 数字IO的值范围 0 ~ 72, 0xC0 ~ 0xC8return g_digtial_io_cnt;
}int get_digtial_io_sn(int iPosition) {if ((iPosition < 0) || (iPosition >= g_digtial_io_cnt)) {return -1; // error}if ((iPosition >= 0) && (iPosition <= 72)) {return iPosition;} else {return (0xC0 + (iPosition - 72 - 1));}
}void show_all_digtial_io_value() {int i = 0;int io_sn = 0;int i_col = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "%s\r\n", LINE_60);UartDebugPrintf(UART_LOG_LEVEL_INFO, "digtial IO io_sn below:\r\n");for (i = 0; i < get_digtial_io_cnt(); i++) {io_sn = get_digtial_io_sn(i);UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6d ", io_sn);// if (i <= 72) {// UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6d ", value);// } else {// UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6.2X ", /*"0x",*/ value);// }if (8 == ++i_col) {i_col = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "\r\n");}}UartDebugPrintf(UART_LOG_LEVEL_INFO, "\r\n%s\r\n", LINE_60);
}void find_same_digtial_io() {int i = 0;int i_pins_connect_cnt = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "find_same_digtial_io\r\n");for (i = 0; i < get_digtial_io_cnt(); i++) {i_pins_connect_cnt += find_same_digtial_io(i);}if (0 == i_pins_connect_cnt) {UartDebugPrintf(UART_LOG_LEVEL_INFO, "ok - not find connect pins\r\n");} else {UartDebugPrintf(UART_LOG_LEVEL_INFO, "err - find connect pins = %d\r\n", i_pins_connect_cnt);}
}int find_same_digtial_io(int ipos) {int i = 0;int io_sn = 0;int io_sn_pos = 0;int value_readback = 0;int value_ipos = 0;int i_pins_connect_cnt = 0;// 将 ipos位置的引脚设置为输出// 将其他引脚设置为输入for (i = 0; i < get_digtial_io_cnt(); i++) {io_sn = get_digtial_io_sn(i);if (i == ipos) {// 设置为输出pinMode(io_sn, OUTPUT);} else {// 设置为输入, 内部上拉pinMode(io_sn, INPUT_PULLUP);}}// 将ipos对应引脚设置为Lio_sn = get_digtial_io_sn(ipos);io_sn_pos = io_sn;digitalWrite(io_sn, LOW);delay(10);for (i = 0; i < get_digtial_io_cnt(); i++) {if (i == ipos) {continue;}io_sn = get_digtial_io_sn(i);value_readback = digitalRead(io_sn);if (LOW == value_readback) {UartDebugPrintf(UART_LOG_LEVEL_INFO, "D%d = D%d = %d\r\n", io_sn_pos, io_sn, value_readback);i_pins_connect_cnt++;}}return i_pins_connect_cnt;
}确定要摘掉的数字重合线
find_same_digtial_io
D22 = D11 = 0
D56 = D31 = 0
D59 = D38 = 0
D71 = D6 = 0
D72 = D27 = 0
err - find connect pins = 5
我的飞达控制工程中, 有数字IO对应的航插端口号, 找到之后, 将物理飞达摘掉.
// D22 = D11 = 0
// FD_TX69/D22_CN7_13/数字IO号码 = 22 // 保留FD_TX69
SoftwareSerial softUartToFd_22(22, 22, true);// D22 = D11 = 0
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 摘掉FD_TX70飞达
SoftwareSerial softUartToFd_11(11, 11, true);// D56 = D31 = 0
// FD_TX20/D56_CN9_14/数字IO号码 = 56 // 保留飞达 FD_TX20
SoftwareSerial softUartToFd_56(56, 56, true);// D56 = D31 = 0
// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42
SoftwareSerial softUartToFd_31(31, 31, true);// D59 = D38 = 0
// FD_TX25/D59_CN9_20/数字IO号码 = 59 // 保留飞达FD_TX25
SoftwareSerial softUartToFd_59(59, 59, true);// D59 = D38 = 0
// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41
SoftwareSerial softUartToFd_38(38, 38, true);
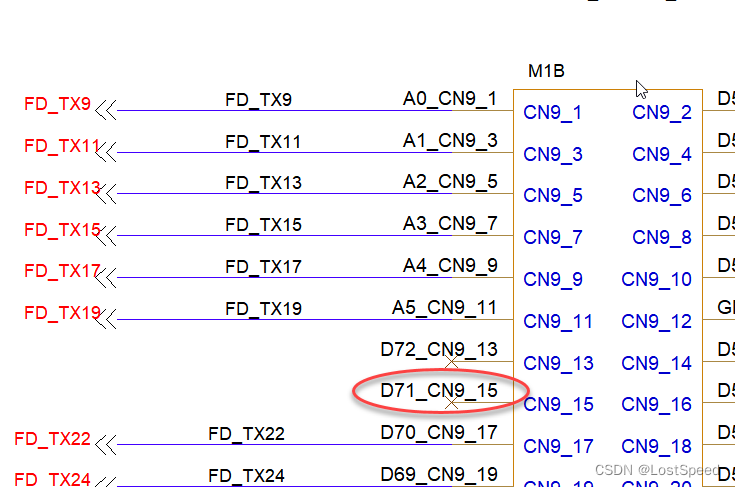
// D71 = D6 = 0
// FD_TX24/D69_CN9_19/数字IO号码 = 69 // 保留FD_TX24
SoftwareSerial softUartToFd_69(69, 69, true);
D71在原理图上没用, 所以和D6不冲突.
// D72 = D27 = 0
// FD_TX50/D27_CN10_15/数字IO号码 = 27 // 保留FD_TX50
SoftwareSerial softUartToFd_27(27, 27, true);D72在原理图中没用, 所以和D27不冲突.
综合以上, 需要摘到的飞达为3把:
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 摘掉FD_TX70飞达
// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42
// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41
在代码中已经记录了飞达的物理位置(和航插到飞达控制板插座的连接有关)
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 面对设备背面, 从左往右数, 第17个航插 // 摘掉FD_TX70飞达FEEDER_UART_INFO(11, &softUartToFd_11), // 正对设备背面, 从右往左第10个飞达 M615 N84\r\n M615 N85\r\n // 不好使// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42FEEDER_UART_INFO(31, &softUartToFd_31), // M615 N68\r\n M615N69 \r\n // 面对设备背面, 从左往右数, 第9个航插// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41FEEDER_UART_INFO(38, &softUartToFd_38), // M615 N70\r\n M615N71 \r\n // 面对设备背面, 从左往右数, 第10个航插如果不是工程实现中记录的仔细, 要摘掉哪个飞达还真有点懵.

明天再测试一遍, 看看在物理飞达正常的情况下, 飞达通讯上是否非常流畅?
今天测试了一下, 除了个别飞达本身有问题, 换上好的飞达后, 通讯没问题, 再也没出现某个飞达因为回包乱码导致的通讯失败.
自动化测试的问题
在openpnp中, 最好某个固定位置的飞达有固定的飞达ID, 如果有问题, 或者飞达通讯失败, 可以马上发现.
这就需要将固定位置的飞达都设置为预想的ID.
但是, 西门子二手飞达难免发生问题, 如果再换一把飞达, 或者将飞达交换了位置, 此时, 还需要固定位置的飞达有固定的ID. 如果手工设置, 就太勉强了.
而且还想在openpnp运行前, 知道哪个飞达有通讯问题. 这也不是手工能便利做到的.
还是老套路, 写个测试程序.
测试程序的功能如下:
- 遍历设备上的每个飞达航插位, 进行如下操作.
- 如果飞达的ID不是预想的ID, 就设置为预想的ID
- 如果飞达的状态是错误的, 就要报出来, 并统计总共有多少个错误.
正好以前在CSDN上传过串口测试程序, 将工程下载到本地, 将逻辑换为飞达控制板的协议就ok.
写了4个小时, 搞定. 运行一分钟不到, 就可以将设备上挂满飞达的场景全部测试, 设置完成.
自己会写2句程序, 管用啊.
测试程序的场景
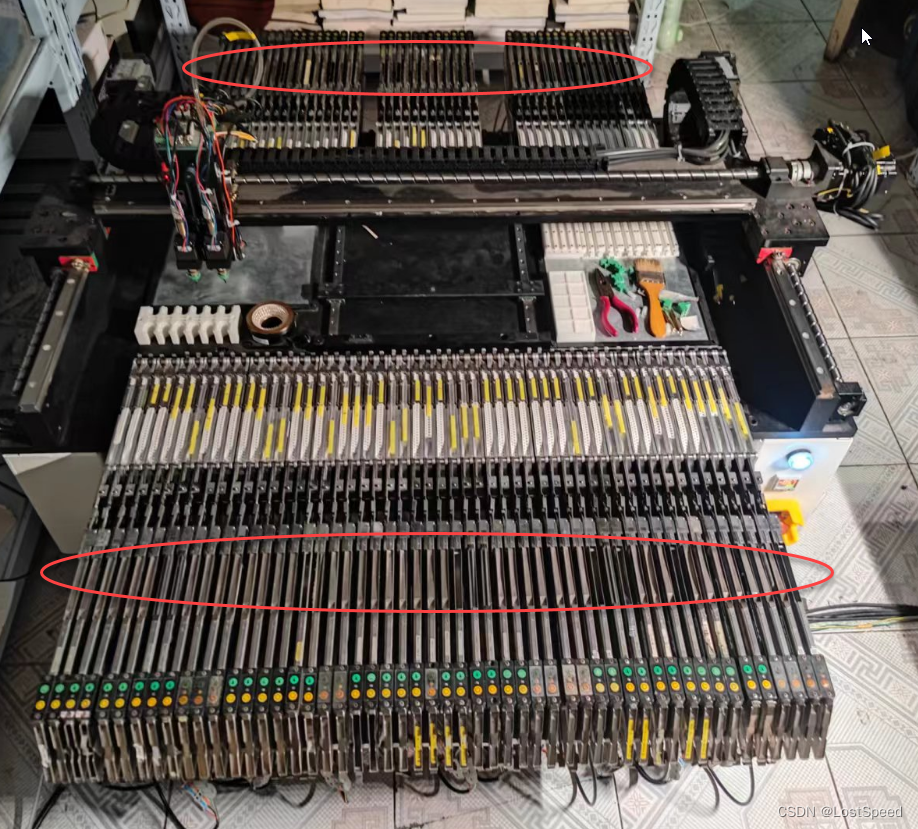
设备挂满飞达. 除了数字IO重合的3把飞达, 总共挂了49把2x8mm的西门子飞达, 总共98个8mm料位.
挂满飞达就是为了测试满载状态下有没有可能会出问题? e.g. 电流不够, 通讯不畅.
结果很好, 没啥问题.
现在飞达都换成了测试通过的正常飞达, 开机上电后, 飞达都正常上了电, 没有飞达会出现错误指示灯:)
测试程序的运行效果
运行后, 如果有错误就报出, 如果没看到错误,就是飞达运行正常.
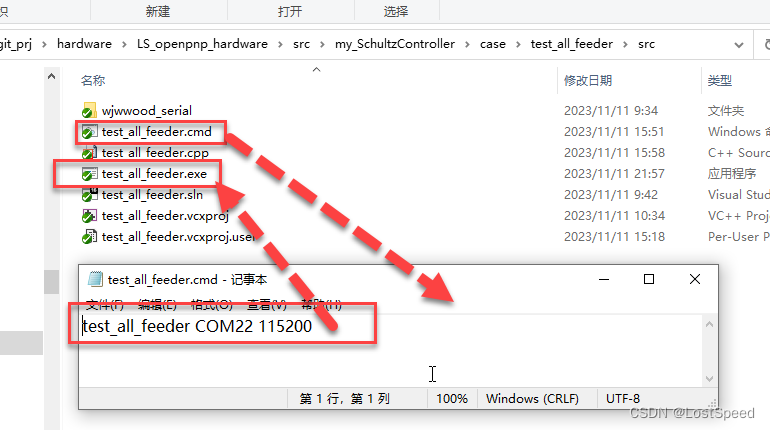
程序参数(串口号码, 波特率)可以由程序命令行参数给出, 也可以运行程序后, 根据程序的参数提示给出.
D:\my_dev\my_local_git_prj\hardware\LS_openpnp_hardware\src\my_SchultzController\case\test_all_feeder\src>test_all_feeder COM22 115200
>> test all feederargv[1] = COM22
argv[2] = 115200
-------------------------------------------------------------------------------------------------------------------------------------
|port_sn |port_name |port_desc |port_hd_id |
-------------------------------------------------------------------------------------------------------------------------------------
|0 |COM22 |STMicroelectronics STLink Virtual COM Port (COM22) |USB\VID_0483&PID_374E&REV_0100&MI_02 |
-------------------------------------------------------------------------------------------------------------------------------------
|1 |COM8 |USB-SERIAL CH340 (COM8) |USB\VID_1A86&PID_7523&REV_0264 |
-------------------------------------------------------------------------------------------------------------------------------------
THE com port name is "COM22"you select com timout(ms) is 100you select data bits is 8you select com parity type(sn) 0
you select com parity type is parity_noneyou select com stopbits(sn) 1
you select com stop bits is 1bitsyou select com flowcontrol(sn) 0
you select com flowcontrol is none-------------------------------------------------------------------------------------------------------------------------------------
COM port info:
-------------------------------------------------------------------------------------------------------------------------------------
com port = COM22
baudrate = 115200
timout = 100(ms)
data bits = 8
parity type = parity_none
stop bits = 1bits
flowcontrol = none
-------------------------------------------------------------------------------------------------------------------------------------
COM port open ok!
process all feeder
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[1L] : N0
FeederNoBase1[1R] : N1
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[2L] : N2
FeederNoBase1[2R] : N3
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[3L] : N4
FeederNoBase1[3R] : N5
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[4L] : N6
FeederNoBase1[4R] : N7
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[5L] : N8
FeederNoBase1[5R] : N9
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[6L] : N10
FeederNoBase1[6R] : N11
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[7L] : N12
FeederNoBase1[7R] : N13
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[8L] : N14
FeederNoBase1[8R] : N15
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[9L] : N16
FeederNoBase1[9R] : N17
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[10L] : N18
FeederNoBase1[10R] : N19
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[11L] : N20
FeederNoBase1[11R] : N21
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[12L] : N22
FeederNoBase1[12R] : N23
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[13L] : N24
FeederNoBase1[13R] : N25
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[14L] : N26
FeederNoBase1[14R] : N27
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[15L] : N28
FeederNoBase1[15R] : N29
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[16L] : N30
FeederNoBase1[16R] : N31
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[17L] : N32
FeederNoBase1[17R] : N33
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[18L] : N34
FeederNoBase1[18R] : N35
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[19L] : N36
FeederNoBase1[19R] : N37
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[20L] : N38
FeederNoBase1[20R] : N39
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[21L] : N40
FeederNoBase1[21R] : N41
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[22L] : N42
FeederNoBase1[22R] : N43
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[23L] : N44
FeederNoBase1[23R] : N45
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[24L] : N46
FeederNoBase1[24R] : N47
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[25L] : N48
FeederNoBase1[25R] : N49
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[26L] : N50
FeederNoBase1[26R] : N51
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[27L] : N52
FeederNoBase1[27R] : N53
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[28L] : N54
FeederNoBase1[28R] : N55
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[29L] : N56
FeederNoBase1[29R] : N57
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[30L] : N58
FeederNoBase1[30R] : N59
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[31L] : N60
FeederNoBase1[31R] : N61
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[32L] : N62
FeederNoBase1[32R] : N63
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[33L] : N64
FeederNoBase1[33R] : N65
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[34L] : N66
FeederNoBase1[34R] : N67
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 35 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 36 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[37L] : N72
FeederNoBase1[37R] : N73
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[38L] : N74
FeederNoBase1[38R] : N75
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[39L] : N76
FeederNoBase1[39R] : N77
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[40L] : N78
FeederNoBase1[40R] : N79
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[41L] : N80
FeederNoBase1[41R] : N81
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[42L] : N82
FeederNoBase1[42R] : N83
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 43 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[44L] : N86
FeederNoBase1[44R] : N87
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[45L] : N88
FeederNoBase1[45R] : N89
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[46L] : N90
FeederNoBase1[46R] : N91
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[47L] : N92
FeederNoBase1[47R] : N93
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[48L] : N94
FeederNoBase1[48R] : N95
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[49L] : N96
FeederNoBase1[49R] : N97
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[50L] : N98
FeederNoBase1[50R] : N99
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[51L] : N100
FeederNoBase1[51R] : N101
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[52L] : N102
FeederNoBase1[52R] : N103
-------------------------------------------------------------------------------------------------------------------------------------
ok : feeder process all ok
请按任意键继续. . .
测试程序实现
vs2019 + vc++ + console
都写在一个cpp中了, 不到800行, 写了4个小时, 边写边连着设备调试.
// @file test_all_feeder.cpp
// @brief 测试设备上的所有飞达
// @note
// prj base https://lostspeed.blog.csdn.net/article/details/109882721 <<串口自动应答测试程序>>
// base prj download from : https://download.csdn.net/download/LostSpeed/13132083 <<ls_serial_port_test_tool_v1.zip>>#include <windows.h>#include <string>
#include <iostream>
#include <cstdio>using namespace std;#include "serial/serial.h"
#pragma comment(lib, "Setupapi.lib")//#if (_MSC_VER >= 1915)
//#define no_init_all deprecated
//#endif#define LINE_10 "----------"
#define LINE_3 "---"
#define LINE120 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_3
#define LINE_IND LINE120
#define LINE_TIP_FMT "|%-10s|%-10s|%-60s|%-48s|\n"
#define LINE_CONTENT_FMT "|%-10d|%-10s|%-60s|%-48s|\n"#define LINE_DATA_BITS_TIP_FMT "|%-10s %-10s %-60s %-48s|\n"
#define LINE_DATA_BITS_CONTENT_FMT "|%-10d %-10s %-60s %-48s|\n"#define LINE_PARITY_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_PARITY_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"#define LINE_STOPBITS_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_STOPBITS_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"#define LINE_FLOWCONTROL_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_FLOWCONTROL_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"const char* get_parity_type(serial::parity_t type)
{const char* psz_type = "unknown parity type";switch (type) {case serial::parity_t::parity_none:psz_type = "parity_none";break;case serial::parity_t::parity_odd:psz_type = "parity_odd";break;case serial::parity_t::parity_even:psz_type = "parity_even";break;case serial::parity_t::parity_mark:psz_type = "parity_mark";break;case serial::parity_t::parity_space:psz_type = "parity_space";break;default:break;}return psz_type;
}const char* get_stopbits_type(serial::stopbits_t type)
{const char* psz_type = "unknown stopbits type";switch (type) {case serial::stopbits_t::stopbits_one:psz_type = "1bits";break;case serial::stopbits_t::stopbits_one_point_five:psz_type = "1.5bits";break;case serial::stopbits_t::stopbits_two:psz_type = "2bits";break;default:break;}return psz_type;
}const char* get_flowcontroltype(serial::flowcontrol_t type)
{const char* psz_type = "unknown flowcontrol type";switch (type) {case serial::flowcontrol_t::flowcontrol_hardware:psz_type = "hardware";break;case serial::flowcontrol_t::flowcontrol_none:psz_type = "none";break;case serial::flowcontrol_t::flowcontrol_software:psz_type = "software";break;default:break;}return psz_type;
}void proc_uart(serial::Serial& my_serial);int main(int argc, char** argv)
{int i = 0;int i_tmp = 0;bool b_cmd_line_param = false;char szBufCmdLine_UartName[0x100];int BufCmdLIne_UartBps = 0;uint8_t buf_rx[4096] = {'\0'};size_t buf_rx_len = 0;size_t buf_rx_total_len = 0;uint8_t buf_tx[4096] = { '\0' };size_t buf_tx_len = 0;int dev_port = -1;uint32_t dev_baurd = 0;uint32_t dev_timeout = 0;serial::bytesize_t dev_data_bits = serial::bytesize_t::eightbits;serial::parity_t dev_parity_type = serial::parity_t::parity_none;serial::stopbits_t dev_stopbits = serial::stopbits_t::stopbits_one;serial::flowcontrol_t dev_flowcontrol_type = serial::flowcontrol_t::flowcontrol_none;ShowWindow(GetConsoleWindow(), SW_MAXIMIZE); do {printf(">> test all feeder\n\n");if (3 == argc){// 用户给了串口号和bpsprintf("argv[%d] = %s\n", 1, argv[1]);strcpy(szBufCmdLine_UartName, argv[1]);printf("argv[%d] = %s\n", 2, argv[2]);BufCmdLIne_UartBps = atoi(argv[2]);b_cmd_line_param = true;}vector<serial::PortInfo> devices_found = serial::list_ports();vector<serial::PortInfo>::iterator iter;// 选择串口// 顶住左边开始, 每30个字符为一个显示字段printf("%s\n", LINE_IND);printf(LINE_TIP_FMT, "port_sn", "port_name", "port_desc", "port_hd_id");printf("%s\n", LINE_IND);dev_port = 0;iter = devices_found.begin();while (iter != devices_found.end()){serial::PortInfo device = *iter++;printf(LINE_CONTENT_FMT, dev_port++, device.port.c_str(), device.description.c_str(), device.hardware_id.c_str());printf("%s\n", LINE_IND);}if (!b_cmd_line_param){printf("please select com port(port_sn):");scanf_s("%2d", &dev_port);printf("you select com port(port_sn) is %d\n", dev_port);}else {// szBufCmdLine_UartName// BufCmdLIne_UartBpsdev_port = -1;iter = devices_found.begin();while (iter != devices_found.end()){serial::PortInfo device = *iter++;dev_port++;if (0 == strcmp(szBufCmdLine_UartName, device.port.c_str())){break; // find it}}}if ((dev_port < 0) || (dev_port >= devices_found.size())) {printf("com port select error!\n");break;}printf("THE com port name is \"%s\"\n\n", devices_found[dev_port].port.c_str());// 选择波特率if (!b_cmd_line_param){printf("please select com baudrate:");scanf_s("%u", &dev_baurd);printf("you select com baudrate is %u\n\n", dev_baurd);}else {dev_baurd = BufCmdLIne_UartBps;}// 选择超时// printf("please select com timout(ms):");// scanf_s("%u", &dev_timeout);dev_timeout = 100;printf("you select com timout(ms) is %u\n\n", dev_timeout);// 选择数据位//printf("%s\n", LINE_IND);//printf(LINE_DATA_BITS_TIP_FMT, "bits", "", "", "");//printf("%s\n", LINE_IND);//for (i = (int)serial::bytesize_t::fivebits; i <= (int)serial::bytesize_t::eightbits; i++) {// printf(LINE_DATA_BITS_CONTENT_FMT, i, "", "", "");// printf("%s\n", LINE_IND);//}//printf("please select com data bits:");// scanf_s("%u", &i_tmp);i_tmp = 8;printf("you select data bits is %d\n\n", i_tmp);if ((i_tmp < (int)serial::bytesize_t::fivebits)|| (i_tmp > (int)serial::bytesize_t::eightbits)) {printf("error\n");break;}dev_data_bits = (serial::bytesize_t)i_tmp;// 选择校验位//printf("%s\n", LINE_IND);//printf(LINE_PARITY_TIP_FMT, "sn", "type", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_none, "none", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_odd, "odd", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_even, "even", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_mark, "mark", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_space, "space", "", "");//printf("%s\n", LINE_IND);//printf("please select com parity type(sn):");// scanf_s("%u", &i_tmp);i_tmp = 0;printf("you select com parity type(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::parity_t::parity_none)|| (i_tmp > (int)serial::parity_t::parity_space)) {printf("error\n");break;}dev_parity_type = (serial::parity_t)i_tmp;printf("you select com parity type is %s\n\n",get_parity_type(dev_parity_type));// 选择停止位//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_TIP_FMT, "sn", "bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_one, "1 bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_one_point_five, "1.5 bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_two, "2 bits", "", "");//printf("%s\n", LINE_IND);// printf("please select com stopbits(sn):");// scanf_s("%u", &i_tmp);i_tmp = 1;printf("you select com stopbits(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::stopbits_t::stopbits_one)|| (i_tmp > (int)serial::stopbits_t::stopbits_one_point_five)) {printf("error\n");break;}dev_stopbits = (serial::stopbits_t)i_tmp;printf("you select com stop bits is %s\n\n",get_stopbits_type(dev_stopbits));// 选择流控//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_TIP_FMT, "sn", "type", "", "");//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_none, "none", "", "");//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_hardware, "hardware", "", "");//printf("%s\n", LINE_IND); ////printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_software, "software", "", "");//printf("%s\n", LINE_IND);//printf("please select com flowcontrol(sn):");// scanf_s("%u", &i_tmp);i_tmp = 0;printf("you select com flowcontrol(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::flowcontrol_t::flowcontrol_none)|| (i_tmp > (int)serial::flowcontrol_t::flowcontrol_hardware)) {printf("error\n");break;}dev_flowcontrol_type = (serial::flowcontrol_t)i_tmp;printf("you select com flowcontrol is %s\n\n",get_flowcontroltype(dev_flowcontrol_type));// 再整体打印一次用户的串口信息选择printf("%s\n", LINE_IND);printf("COM port info:\n");printf("%s\n", LINE_IND);printf("com port = %s\n", devices_found[dev_port].port.c_str());printf("baudrate = %u\n", dev_baurd);printf("timout = %u(ms)\n", dev_timeout);printf("data bits = %d\n", dev_data_bits);printf("parity type = %s\n", get_parity_type(dev_parity_type));printf("stop bits = %s\n", get_stopbits_type(dev_stopbits));printf("flowcontrol = %s\n", get_flowcontroltype(dev_flowcontrol_type));printf("%s\n", LINE_IND);serial::Serial my_serial(devices_found[dev_port].port.c_str(),dev_baurd,serial::Timeout::simpleTimeout(dev_timeout),dev_data_bits,dev_parity_type,dev_stopbits,dev_flowcontrol_type);if (my_serial.isOpen()) {printf("COM port open ok!\n");}else {printf("COM port open failed...\n");break;}/*void setTimeout (uint32_t inter_byte_timeout,uint32_t read_timeout_constant,uint32_t read_timeout_multiplier,uint32_t write_timeout_constant,uint32_t write_timeout_multiplier)*/my_serial.setTimeout(serial::Timeout::max(),dev_timeout /*1000*/ /*serial::Timeout::max()*/, // 这里是读超时,如果是发送完等接收,这里就设置正常ms超时值; 如果是被动等别人问,就设置成serial::Timeout::max()0,0,0);proc_uart(my_serial);} while (false);system("pause");return EXIT_SUCCESS;
}void M999(serial::Serial& my_serial)
{size_t LenRx = 0;char szBufSend[1024];char szBufRecv[1024];do {memset(szBufSend, 0, sizeof(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));// send M999sprintf(szBufSend, "M999\r\n");my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));LenRx = my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (LenRx <= 0){break;}/*M115 MCODE_DRIVER_INFOM600 MCODE_PRE_PICKM601 MCODE_ADVANCE e.g. M601N0X1 is ok, M601N0X0 is errM602 MCODE_FEEDER_STATUSM603 MCODE_GET_FEED_COUNTM623 MCODE_CLEAR_FEED_COUNTM604 MCODE_GET_ERR42_COUNTM605 MCODE_GET_ERR43_COUNTM606 MCODE_GET_ERR44_COUNTM607 MCODE_GET_RESET_COUNTM608 MCODE_GET_PITCHM628 MCODE_TOGGLE_PITCHM610 MCODE_GET_FEEDER_IDM640 MCODE_SET_FEEDER_IDM630 MCODE_READ_EEPROMM615 MCODE_GET_FIRMWARE_INFOM650 MCODE_START_SELF_TESTM651 MCODE_STOP_SELF_TESTM998 MCODE_CLEAR_RX_BUFM999 MCODE_CMD_HELP*/printf("%s\n", szBufRecv);} while (false);
}bool proc_uart_Nxx(serial::Serial& my_serial, int FeederNoBase1, int Nxx);void proc_uart(serial::Serial& my_serial)
{int i = 0;int j = 0;int FeederNoBase1 = 0;int Nxx = 0;int i_err_cnt = 0;size_t LenRx = 0;char szBufNxx[0x100];// basic usage// buf_rx_len = my_serial.read(buf_rx + buf_rx_total_len, sizeof(char));// buf_tx_len = my_serial.write(buf_tx, 7); // send respond// M999(my_serial);/*// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 面对设备背面, 从左往右数, 第17个航插 // 摘掉FD_TX70飞达FEEDER_UART_INFO(11, &softUartToFd_11), // 正对设备背面, 从右往左第10个飞达 M615 N84\r\n M615 N85\r\n // 不好使No.43 FeederN84N85// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42FEEDER_UART_INFO(31, &softUartToFd_31), // M615 N68\r\n M615N69 \r\n // 面对设备背面, 从左往右数, 第9个航插No.35 FeederN68N69// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41FEEDER_UART_INFO(38, &softUartToFd_38), // M615 N70\r\n M615N71 \r\n // 面对设备背面, 从左往右数, 第10个航插No.36 FeederN70N71*/// 设备满配物理飞达数量52(正面26, 背面26), 因为数字IO重合, 导致一个数字IO会给多个飞达发包, 所以去掉了3把.printf("process all feeder\n");for (i = 0; i < 52; i++){printf("%s\n", LINE_IND);FeederNoBase1 = i + 1;if ((43 == FeederNoBase1) || (35 == FeederNoBase1) || (36 == FeederNoBase1)){// 跳过因为数字IO重合而摘掉的物理飞达printf("FeederNoBase1 %d not exist, skip\n", FeederNoBase1);continue;}for (j = 0; j < 2; j++){Nxx = (i * 2 + j);sprintf(szBufNxx, "FeederNoBase1[%d%s] : N%d", FeederNoBase1, ((0 == (Nxx % 2)) ? "L" : "R"), Nxx);printf("%s\n", szBufNxx);if (!proc_uart_Nxx(my_serial, FeederNoBase1, Nxx)){i_err_cnt++;}}}printf("%s\n", LINE_IND);if (0 == i_err_cnt){printf("ok : feeder process all ok\n");}else {printf("error : 1 feeder process error counter = %d\n", i_err_cnt);}}bool is_err_recv(const char* psz_msg)
{// ok ID: 1001L// ok ID setbool b_err = true;const char* psz = NULL;do {if (NULL == psz_msg){break;}psz = strstr(psz_msg, "err");if (psz == psz_msg){break;}b_err = false;} while (false);return b_err;
}bool is_dig_char(char c)
{if ((c >= '0') && (c <= '9')){return true;}return false;
}bool get_id_from_recv(const char* psz_msg, int& id, bool& isLeft)
{// ok ID: 1001Lbool b_ok = false;const char* psz = NULL;do {if (NULL == psz_msg){break;}psz = strstr(psz_msg, "ok ID: ");if (NULL == psz){break;}psz_msg = psz;psz_msg += strlen("ok ID: ");id = atoi(psz_msg);do {if (is_dig_char(psz_msg[0])){psz_msg++;continue;}break;} while (true);if (('L' != psz_msg[0]) && ('R' != psz_msg[0])){break;}isLeft = ('L' == psz_msg[0]);b_ok = true;} while (false);return b_ok;
}bool proc_uart_read_status(serial::Serial& my_serial, int Nxx, char* psz_recv, int len_recv)
{// M602 MCODE_FEEDER_STATUSchar szBufSend[1024];bool b_ok = false;int buf_rx_len = 0;do {sprintf(szBufSend, "M602 N%d\r\n", Nxx);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(psz_recv, 0, len_recv);buf_rx_len = (int)my_serial.read((uint8_t*)psz_recv, len_recv);if (buf_rx_len < 0){printf("error : 2 can't recv any form Nxx[%d]\n", Nxx);break;}if (is_err_recv(psz_recv)){printf("error : 3 [%s]\n", psz_recv);break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_read_ID(serial::Serial& my_serial, int Nxx, int& id, bool& isLeft)
{// M610 MCODE_GET_FEEDER_IDchar szBufSend[1024];char szBufRecv[1024];int buf_rx_len = 0;bool b_ok = false;do {sprintf(szBufSend, "M610 N%d\r\n", Nxx);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));buf_rx_len = (int)my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (buf_rx_len < 0){printf("error : 5 can't recv any form Nxx[%d]\n", Nxx);break;}if (is_err_recv(szBufRecv)){printf("error : 6 recv content have error, szBufRecv[] = [%s]\n", szBufRecv);break;}// printf("%s\n", szBufRecv);// ok ID: 1001Lif (!get_id_from_recv(szBufRecv, id, isLeft)){printf("error : 7 recv parse error, szBufRecv[] = [%s]\n", szBufRecv);break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_set_ID(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{// M640 MCODE_SET_FEEDER_IDchar szBufSend[1024];char szBufRecv[1024];int buf_rx_len = 0;int id = 0;bool isLeft = 0;bool b_ok = false;do {sprintf(szBufSend, "M640 N%dX%d\r\n", Nxx, FeederNoBase1);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));buf_rx_len = (int)my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (buf_rx_len < 0){printf("error : 8 can't recv any form FeederNoBase1[%d]/Nxx[%d]\n", FeederNoBase1, Nxx);break;}// ok ID setif (is_err_recv(szBufRecv)){printf("error : 9 recv content have error\n");break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx_get_feeder_status(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{bool b_ok = false;char szRecv[1024];do {memset(szRecv, 0, sizeof(szRecv));if (!proc_uart_read_status(my_serial, Nxx, szRecv, sizeof(szRecv))){break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx_try_to_change_ID(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{// M610 MCODE_GET_FEEDER_ID// M640 MCODE_SET_FEEDER_IDint buf_rx_len = 0;int id = 0;bool isLeft = 0;bool b_ok = false;do {if (!proc_uart_read_ID(my_serial, Nxx, id, isLeft)){break;}if (id != FeederNoBase1){if (!proc_uart_set_ID(my_serial, FeederNoBase1, Nxx)){break;}}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{bool b_ok = false;do {// 检测飞达ID, 如果不是FeederNoBase1, 改为FeederNoBase1if (!proc_uart_Nxx_try_to_change_ID(my_serial, FeederNoBase1, Nxx)){printf("error : 10 can't try to change ID to Feeder%d-%d\n", FeederNoBase1, Nxx);break;}if (!proc_uart_Nxx_get_feeder_status(my_serial, FeederNoBase1, Nxx)){printf("error : 11 can't get feeder status Feeder%d-N%d\n", FeederNoBase1, Nxx);break;}b_ok = true;} while (false);return b_ok;
}备注
飞达控制这块就搞完了.
现在我设备这块, 还有点要优化.
顶部相机现在是100W像素的, 在openpnp中看不清PCB上的0201和01005焊盘.
已经买了1600W像素的USB摄像头模组(安装孔尺寸为28mm x 28mm, 和现在的顶部相机支架兼容), 回来试试.
现在手头这台设备, 所有细节(机械部分, 电气部分, 软件部分)都可以自己维护, 想搞就搞, 很舒服.