场景
动画
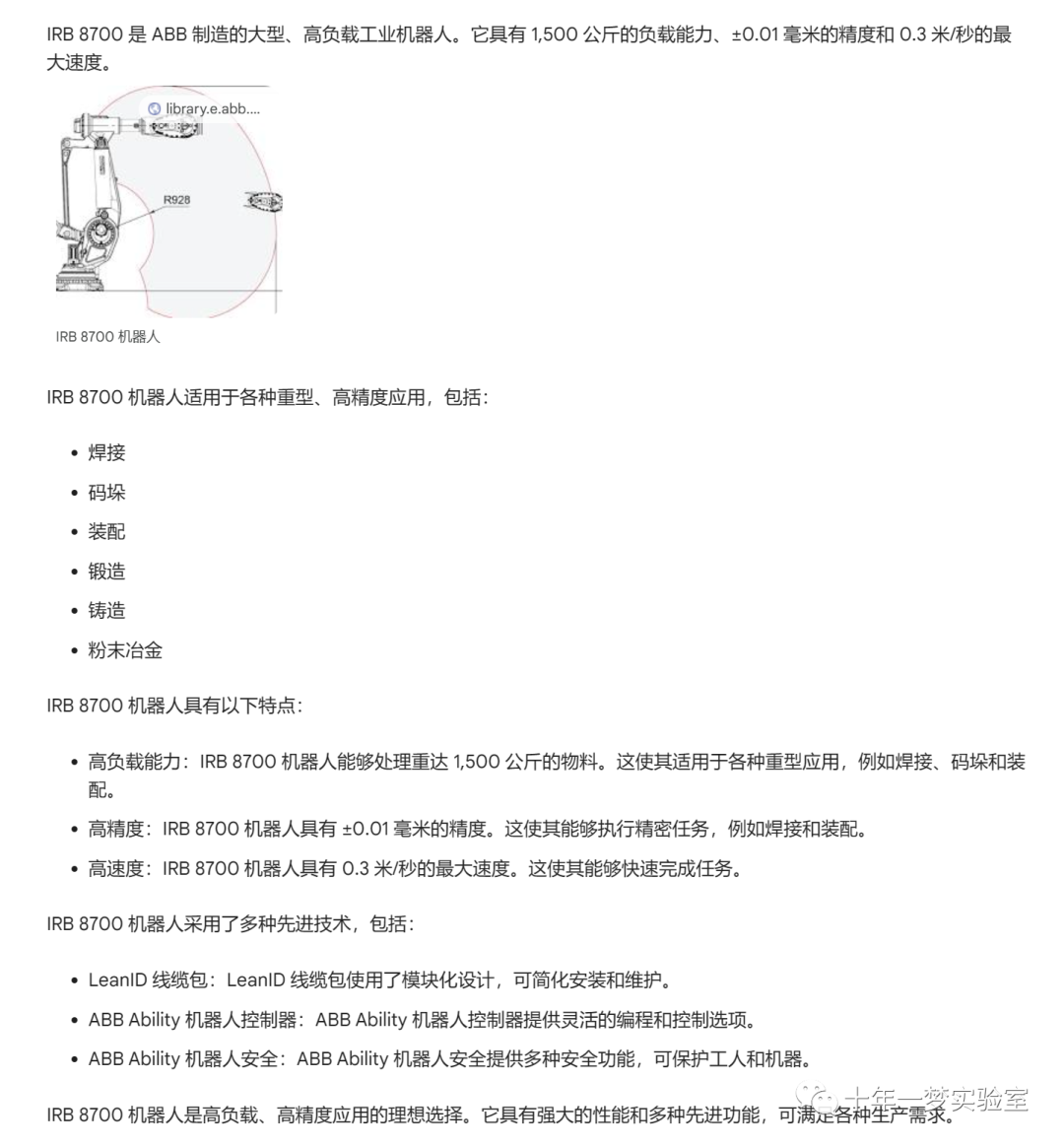
一、IRB 8700简介
二、动画脚本重点分析
2.1 sim.moveToPose
通过在两个 poses 之间执行插值,使用 Ruckig 在线轨迹生成器生成对象运动数据。该函数可以通过处理 4 个运动变量(x、y、z 和两个姿势之间的角度)或单个运动变量(t,需要指定一个度量来计算两个姿势之间的距离)来操作。该函数只能从线程中运行的脚本调用,因为这是一个阻塞操作
float[7]/float[12] endP/endM, float t = sim.moveToPose(int flags, float[7]/float[12] currentP/currentM, float[] maxVel, float[] maxAccel, float[] maxJerk, float[7]/float[12] targetP/targetM, func/string callback, auxData, float[4] metric = nil, float timeStep = 0)Arguments 参数
flags: Ruckig flags. -1 for default flags.
标志:Ruckig 标志。-1 表示默认标志。currentP/currentM: the start pose, specified via a pose [x y z qx qy qz qw] or transformation matrix [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2]
currentP/currentM:起始姿势,通过姿势 [x y z qx qy qz qw] 或变换矩阵 [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2] 指定maxVel: the maximum allowed velocity. If metric is specified, then this is an array of size 1, otherwse an array of size 4. If sim.ruckig_minVel is specified in flags, then this array should contain twice as many values, first the values for the maximum velocity, then the values for the minimum velocity.
maxVel:允许的最大速度。如果指定了 metric,则这是一个大小为 1 的数组,否则为大小为 4 的数组。如果在标志中指定了 sim.ruckig_minVel,则该数组应包含两倍的值,首先是最大速度的值,然后是最小速度值。maxAccel: the maximum allowed acceleration. If metric is specified, then this is an array of size 1, otherwse an array of size 4. If sim.ruckig_minAccel is specified in flags, then this array should contain twice as many values, first the values for the maximum acceleration, then the values for the minimum acceleration.
maxAccel:允许的最大加速度。如果指定了 metric,则这是一个大小为 1 的数组,否则为大小为 4 的数组。如果在标志中指定了 sim.ruckig_minAccel,则该数组应包含两倍的值,首先是最大加速度的值,然后是最小加速度值。maxJerk: the maximum allowed jerk. If metric is specified, then this is an array of size 1, otherwse an array of size 4.
maxJerk:允许的最大加加速度。如果指定了 metric,则这是一个大小为 1 的数组,否则为大小为 4 的数组。targetP/targetM: the goal pose, specified via a pose [x y z qx qy qz qw] or transformation matrix [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2]
targetP/targetM:目标姿势,通过姿势 [x y z qx qy qz qw] 或变换矩阵 [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2] 指定callback: a callback function that will be called for each movement step. The arguments provided to the callback function are: currentPose/currentMatrix, currentVel, currentAccel, auxData.
回调:每个移动步骤都会调用的回调函数。提供给回调函数的参数有:currentPose/currentMatrix、currentVel、currentAccel、auxData。auxData: random data that will be forwarded to the callback function.
auxData:将转发到回调函数的随机数据。metric: an optional metric, used to compute a pose-pose distance. If metric is None/nil, the movement calculation happens in the 4-dimensional space (x,y,z,angle), otherwise it happens in the 1-dimensional space (t).
metric:可选的度量,用于计算位姿-位姿距离。如果 metric 为 None/nil,则运动计算发生在 4 维空间 (x,y,z,angle) 中,否则发生在 1 维空间 (t) 中。timeStep: the desired time step size. A value of 0 indicates that the current simulation time step will be used.
timeStep:所需的时间步长。值 0 表示将使用当前模拟时间步长。
Return values 返回值
endP/endM: the pose at the end of the movement, specified via a pose [x y z qx qy qz qw] or transformation matrix [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2]
endP/endM:运动结束时的位姿,通过位姿 [x y z qx qy qz qw] 或变换矩阵 [Vx0 Vy0 Vz0 P0 Vx1 Vy1 Vz1 P1 Vx2 Vy2 Vz2 P2] 指定t: the leftover time in current simulation step, i.e. the remaining time that was not used for movement.
t:当前模拟步骤的剩余时间,即未用于运动的剩余时间。
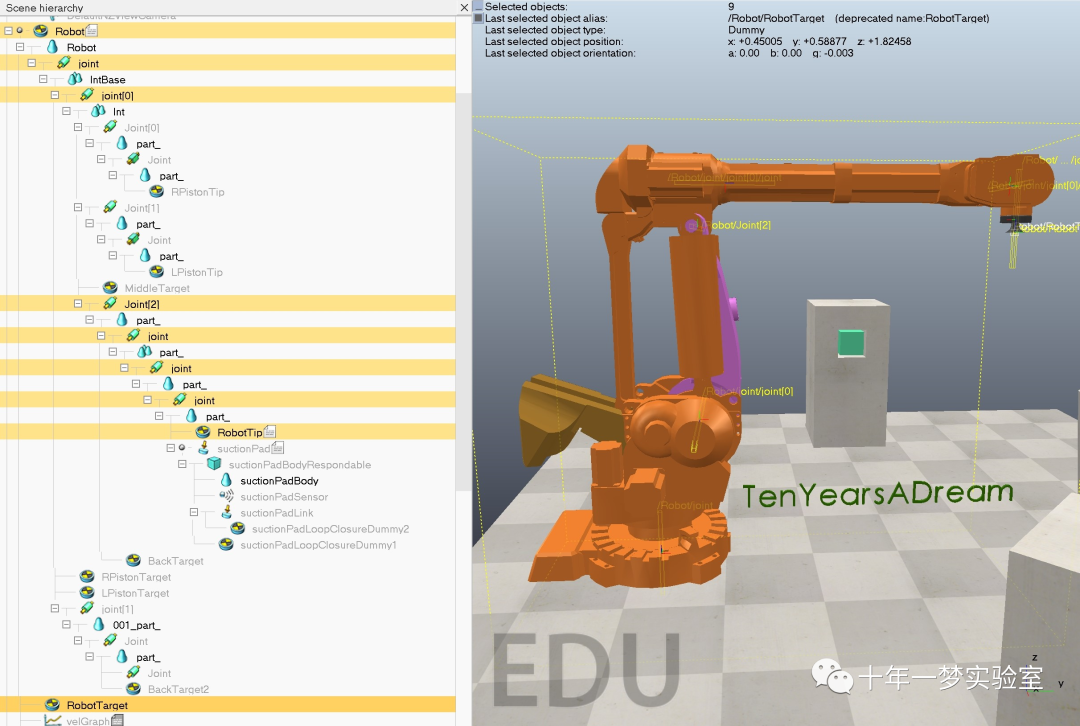
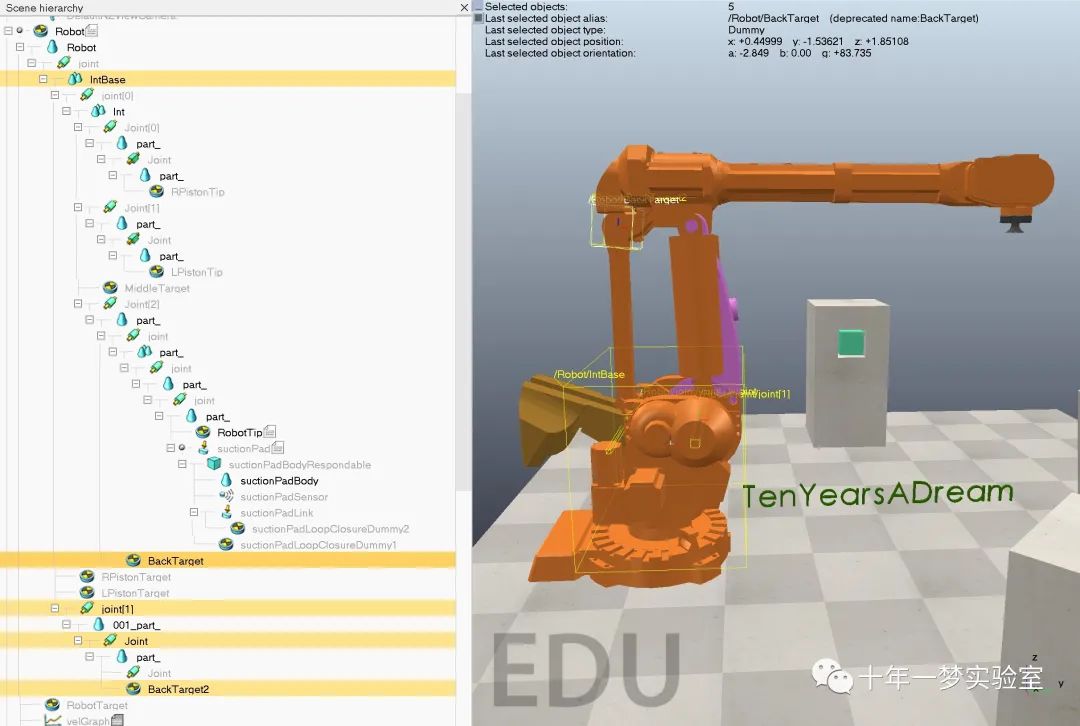
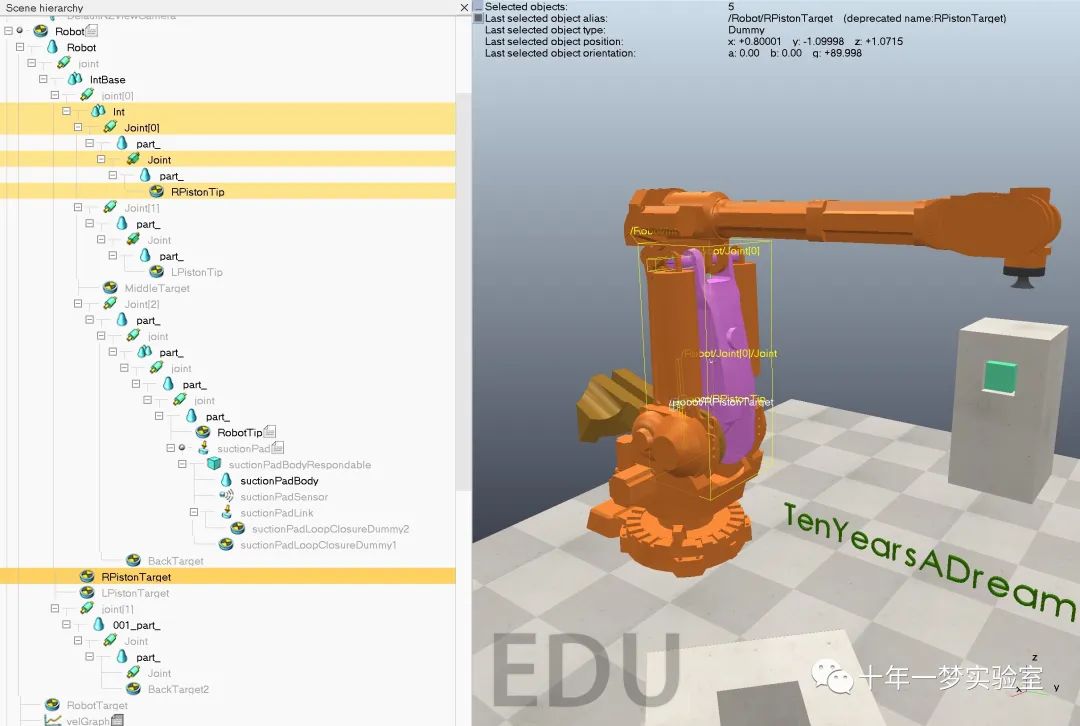
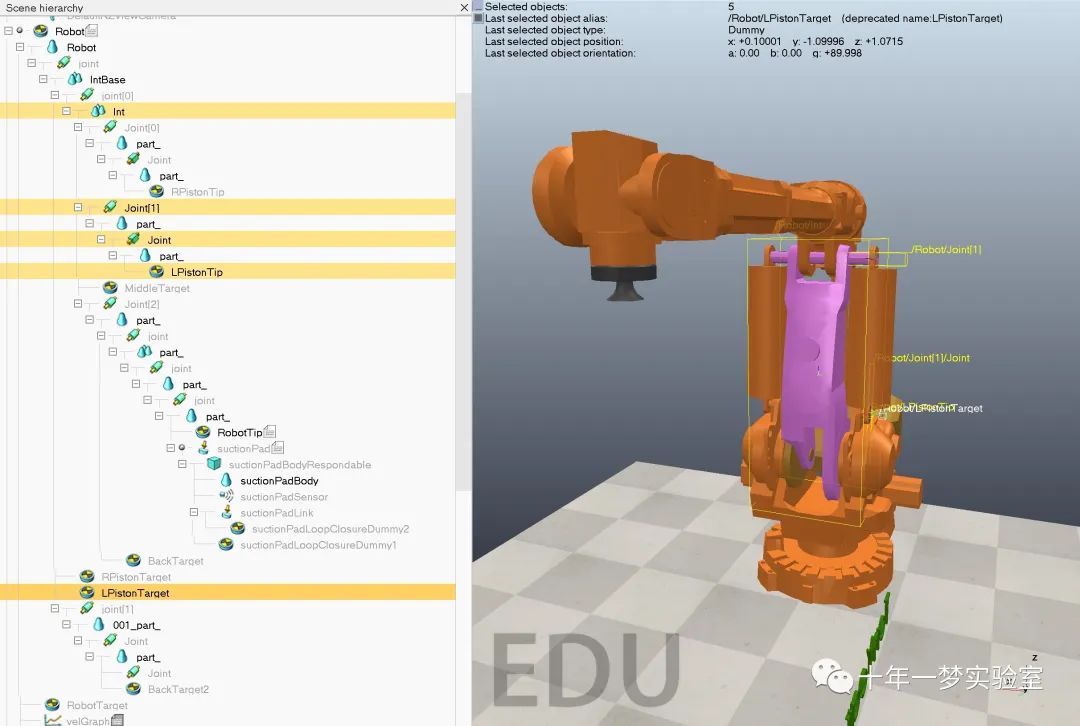
2.2 逆运动学求解
建立4个机器人运动学的IK组,作为auxData成员传递给自定义函数moveToPose,在自定义函数中传递给函数 sim.moveToPose的回调函数,回调函数中调用simIK.handleGroup处理所有逆运动学组的求解并设置{syncWorlds=true}将IK组的处理结果同步到仿真场景。以下依次为ik组1-4.
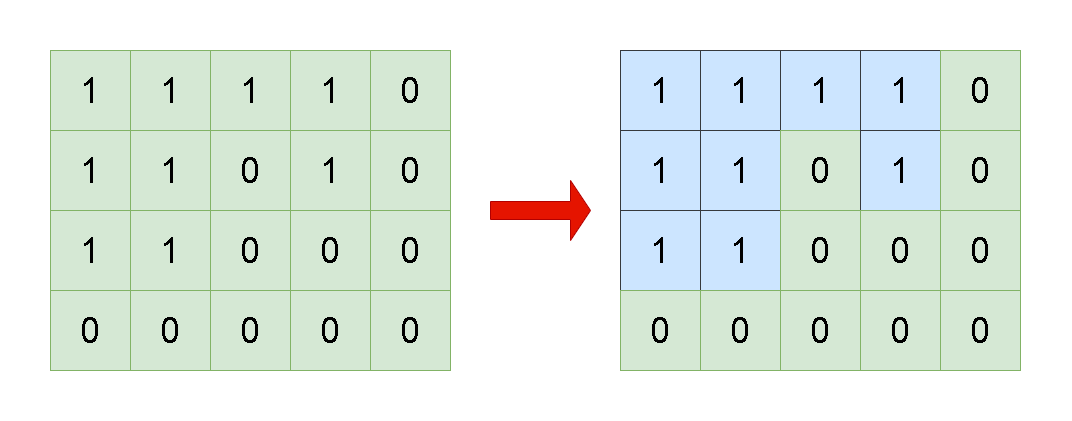
2.3 吸盘仿真
初始化函数中设置了吸盘是否为无限吸力、设置了最大拉力、最大剪切力,最大剥离扭矩。
传感函数中监控模型的自定义数据块吸盘状态:吸合-激活或释放-非激活,进行不同处理。当非激活时,重置dummy l 与l2重合,父对象为吸盘。当激活时,判断父对象是否为吸盘,如果为吸盘说明没有吸物体,此时通过接近传感器获取要吸合的物体,将dummy l绑定到物体上,并关联l 和l2 ;如果已经吸合物体,读取力传感器,判断是否需要有条件的释放物体,比如超出最大拉力、超出最大剪切力,任意方向的扭矩超过最大剥离扭矩。满足释放条件,就地释放物体。 同时在传感函数中实时检测仿真状态是否为“正在停止的最后一步”,如果是,则重置l与l2重合,父对象恢复为吸盘。
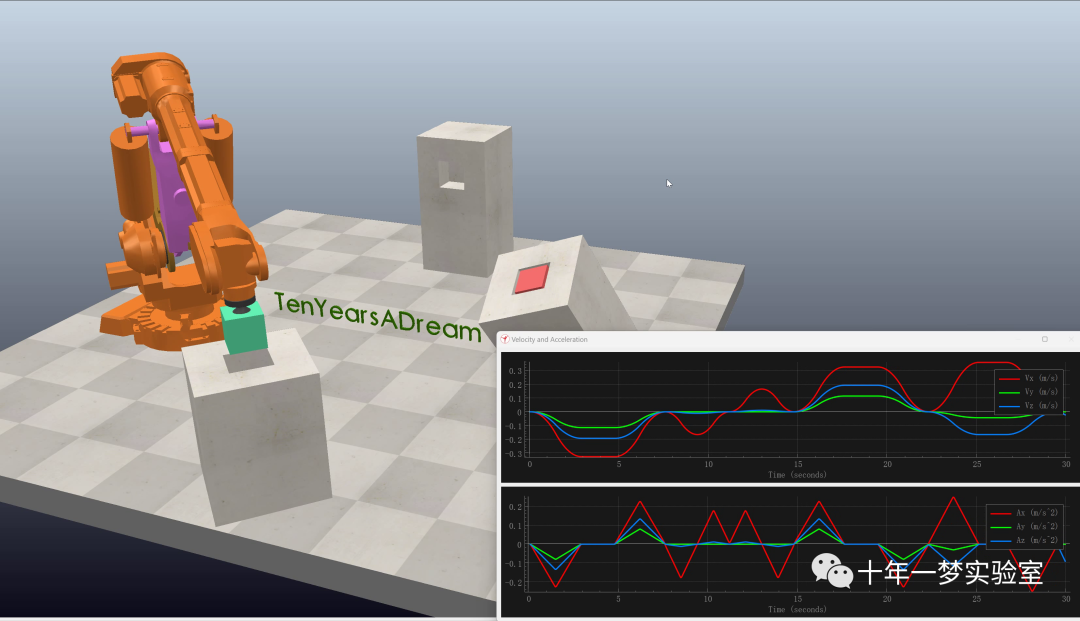
2.4 机器人Tip的速度曲线和加速度曲线
因为Tip的速度可直接获得,可直接用于绘制速度曲线图。加速度曲线图六需要通过 sim.setGraphStreamTransformation设置 sim.stream_transf_derivative,此时直接将速度值传递给加速度曲线即可。
参考网址:
https://new.abb.com/products/robotics/zh/robots/articulated-robots/irb-8700
https://search.abb.com/library/Download.aspx?DocumentID=3HAC052852-001&LanguageCode=en&DocumentPartId=&Action=Launch
https://library.e.abb.com/public/8b7f0d10fde0465c817d18e2e7664d37/IRB8700_datasheet_CN%20Rev%20D.pdf
作者陈晓永:智能装备专业高级工程师,软件工程师。机器人自动化产线仿真动画制作
The End