一、概述
PCL_点云分割_基于法线微分分割_点云法向量微分-CSDN博客
利用不同的半径(大的半径、小半径)来计算同一个点的法向量差值P。判断P的范围,从而进行分割。

看图理解:

二、计算流程
1、计算P点小半径的法向量Ns
2、计算P点大半径的法向量Nl(P 点和1中的P点是同一个点)
3、计算deltN=(Nl-Ns)/2;
4、deltN 和输入的阈值做对比,判断
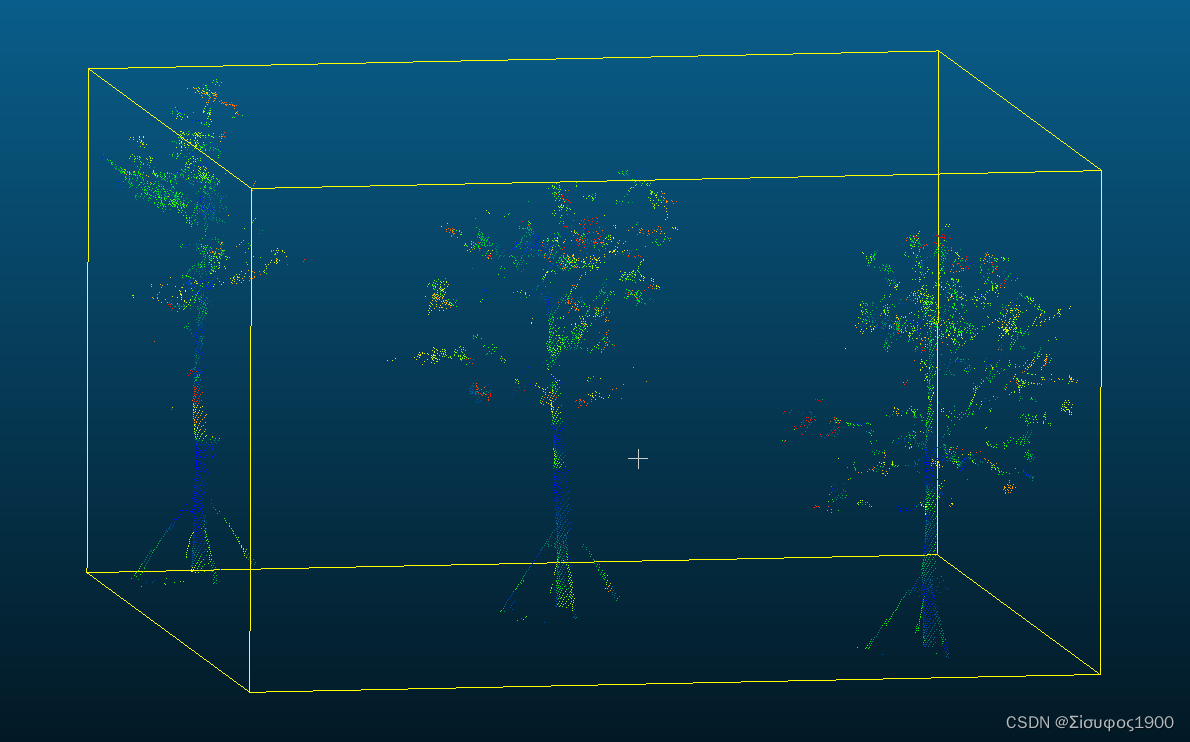
原始点云:
PCL_点云分割_基于法线微分分割_点云法向量微分-CSDN博客
利用不同的半径(大的半径、小半径)来计算同一个点的法向量差值P。判断P的范围,从而进行分割。
看图理解:
1、计算P点小半径的法向量Ns
2、计算P点大半径的法向量Nl(P 点和1中的P点是同一个点)
3、计算deltN=(Nl-Ns)/2;
4、deltN 和输入的阈值做对比,判断
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/195703.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!


![23111701[含文档+PPT+源码等]计算机毕业设计javaweb点餐系统全套餐饮就餐订餐餐厅](https://img-blog.csdnimg.cn/img_convert/5ba3b2e41f5bf233bf4cddda4a3181af.png)