Impedance Control
机器人阻抗控制是一种控制方法,其目的是构建一个系统使得执行器(如机械臂)能同时控制力和位置。它基于阻抗模型,通过调节机器人的行为,以维持理想的动态关系。这种动态关系可以理解为机器人末端位置与接触力的关系。
阻抗控制不是直接控制机器人的运动或与外界的接触力,而是控制这二者之间的动态关系。其最终目的是使机器人与环境作用的等效模型为期望阻抗模型。
Defination of Impedance Control:
![]()
![]()
![]()
![]()
刚度(K)和阻尼(D)参数决定了机器人在受力时的刚性和能量耗散程度。刚度参数决定了机器人的刚性程度,较大的刚度参数使机器人更具刚性,对外界力的响应更迅速。然而,过大的刚度参数可能导致振荡或不稳定的响应。阻尼参数控制机器人在受力时的能量耗散程度。较大的阻尼参数使机器人对外界力的响应更缓慢,减小了振荡的风险。然而,过大的阻尼参数可能导致响应时间过长或不足够灵敏。
微分方程形式:
![]()
机器人动态如下:
![]()
期望阻抗模型:
![]()
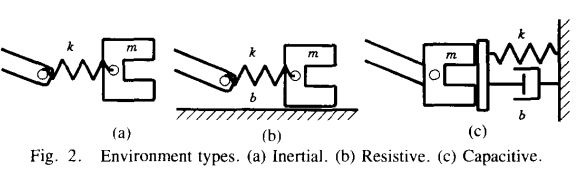
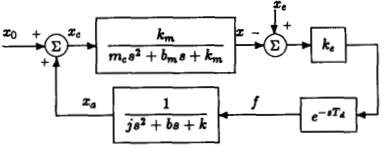
外力的产生:
![]()
![]()
x0为非接触末端执行器轨迹;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Lawrence, D. A. (1988, April). Impedance control stability properties in common implementations. In Proceedings. 1988 IEEE International Conference on Robotics and Automation (pp. 1185-1190). IEEE.