本文介绍在谷歌地球引擎GEE中,提取、计算某一种遥感影像产品在连续的多年中,2个不同时相的数据差值的多年平均值,并将计算得到的这一景差值的结果图像导出的方法。
本文是谷歌地球引擎(Google Earth Engine,GEE)系列教学文章的第十八篇,更多GEE文章请参考专栏:GEE学习与应用(https://blog.csdn.net/zhebushibiaoshifu/category_11081040.html)。
首先,我们来看一下本文需要实现的需求。现在我们希望计算某一个地区中,在2013年到2020年的这8年中,第257天与249天的这2个时间节点上,NDVI数据的差值的平均值;换句话说,我们希望在2013年到2020年的这8年中,计算每一年里第257天与249天的NDVI数据的差值(也就是获得了8个差值),然后对这8个差值计算平均值,最终得到一景结果栅格图像。随后,我们还希望将这一景结果图像导出到本地。
知道了需求,我们即可开始代码的撰写。本文需要用到的代码如下。
var ndvi = ee.ImageCollection("MODIS/MYD09GA_006_NDVI").filterDate('2013-01-01', '2023-01-01').select(["NDVI"]);var filterByDay = function(date) {var start = ee.Date(date).advance(249, 'day');var end = start.advance(1, 'day');return ndvi.filterDate(start, end).mosaic();
};
var filterByDay_2 = function(date) {var start = ee.Date(date).advance(257, 'day');var end = start.advance(1, 'day');return ndvi.filterDate(start, end).mosaic();
};var images = ee.List.sequence(2013, 2020).map(function(year) {var date = ee.Date.fromYMD(year, 1, 1);return filterByDay(date);});
var images_2 = ee.List.sequence(2013, 2020).map(function(year) {var date = ee.Date.fromYMD(year, 1, 1);return filterByDay_2(date);});var result = ee.ImageCollection.fromImages(images);
var result_2 = ee.ImageCollection.fromImages(images_2);// var chinaBoundary = ee.Geometry.Rectangle(73, 8, 136, 54);
var chinaBoundary = ee.Geometry.Rectangle(97, 26, 109, 35);var ndvi_china = result.map(function(image) {return image.clip(chinaBoundary);
});
var ndvi_china_2 = result_2.map(function(image) {return image.clip(chinaBoundary);
});var ndvi_history = ndvi_china.reduce(ee.Reducer.mean());
var ndvi_history_2 = ndvi_china_2.reduce(ee.Reducer.mean());var ndvi_dif_history = ndvi_history_2.subtract(ndvi_history);Map.addLayer(ndvi_dif_history, {}, 'NDVI_History');
Map.centerObject(ndvi_dif_history, 2);var exportParams = {image: ndvi_dif_history,description: 'ndvi_dif_history',scale: 500,region: chinaBoundary,maxPixels: 10000000000000
};Export.image.toDrive(exportParams);
上述代码的具体含义如下。
首先,加载MODIS/MYD09GA_006_NDVI产品,也就是MODIS的NDVI产品;随后,使用.filterDate()方法筛选出日期范围为2013-01-01到2023-01-01的图像(本文只需要计算2013年到2020年的这8年数据,所以这里的截止时间设置为2020-12-31之后的任意时间均可),并使用.select(["NDVI"])方法仅选择NDVI波段。
随后,var filterByDay = function(date) { ... };和var filterByDay_2 = function(date) { ... };这两个函数分别定义了2个不同天数(第257天与249天)的不同的筛选方式。filterByDay函数通过将日期向后推移249天来获取每年的第249天的NDVI图像,而filterByDay_2函数通过将日期向后推移257天来获取每年的第257天的NDVI图像。
其次,var images = ee.List.sequence(2013, 2020).map(function(year) { ... });等两个部分使用ee.List.sequence() 函数生成从2013年到2020年的年份序列,随后通过.map()方法对每个年份应用相应的函数。images变量包含了每年的第249天的的NDVI图像,而images_2变量包含了每年的第257天的NDVI图像。这个函数和前面的函数相结合,就可以提取出从2013年到2020年中每一年的第257天与249天的数据。
接下来,var result = ee.ImageCollection.fromImages(images);等两行代码将images和images_2转换为ee.ImageCollection对象,以便进行后续的图像处理;var ndvi_china = result.map(function(image) { ... });等两个部分使用.map()方法对result和result_2中的每个图像应用函数,即将图像裁剪为我们需要的边界范围内的区域。
随后,var ndvi_history = ndvi_china.reduce(ee.Reducer.mean());等两行代码对ndvi_china和ndvi_china_2中的图像集合应用ee.Reducer.mean()函数进行降维,计算每个像素点在时间范围内的平均的NDVI图像值,也就是获得了2013年到2020年的这8年中,第257天与249天的这2个时间节点上,NDVI数据各自的平均值。随后的这行代码,就是计算ndvi_history_2和ndvi_history之间的差异,相当于就是获得了NDVI数据平均值的差值。
接下来的两行代码,则将ndvi_dif_history图像添加到地图中,并将地图中心设置为该视图的范围。
最后,var exportParams = { ... };和Export.image.toDrive(exportParams);这两段代码为设置导出参数,并使用Export.image.toDrive()将ndvi_dif_history图像导出到Google Drive中。之后,我们就可以到Google Drive中下载这一景导出的数据了。
执行上述代码,如下图所示。首先可以在下方的地图中看到我们计算得到的结果图像,其次可以在右侧看到Tasks中生成的任务。
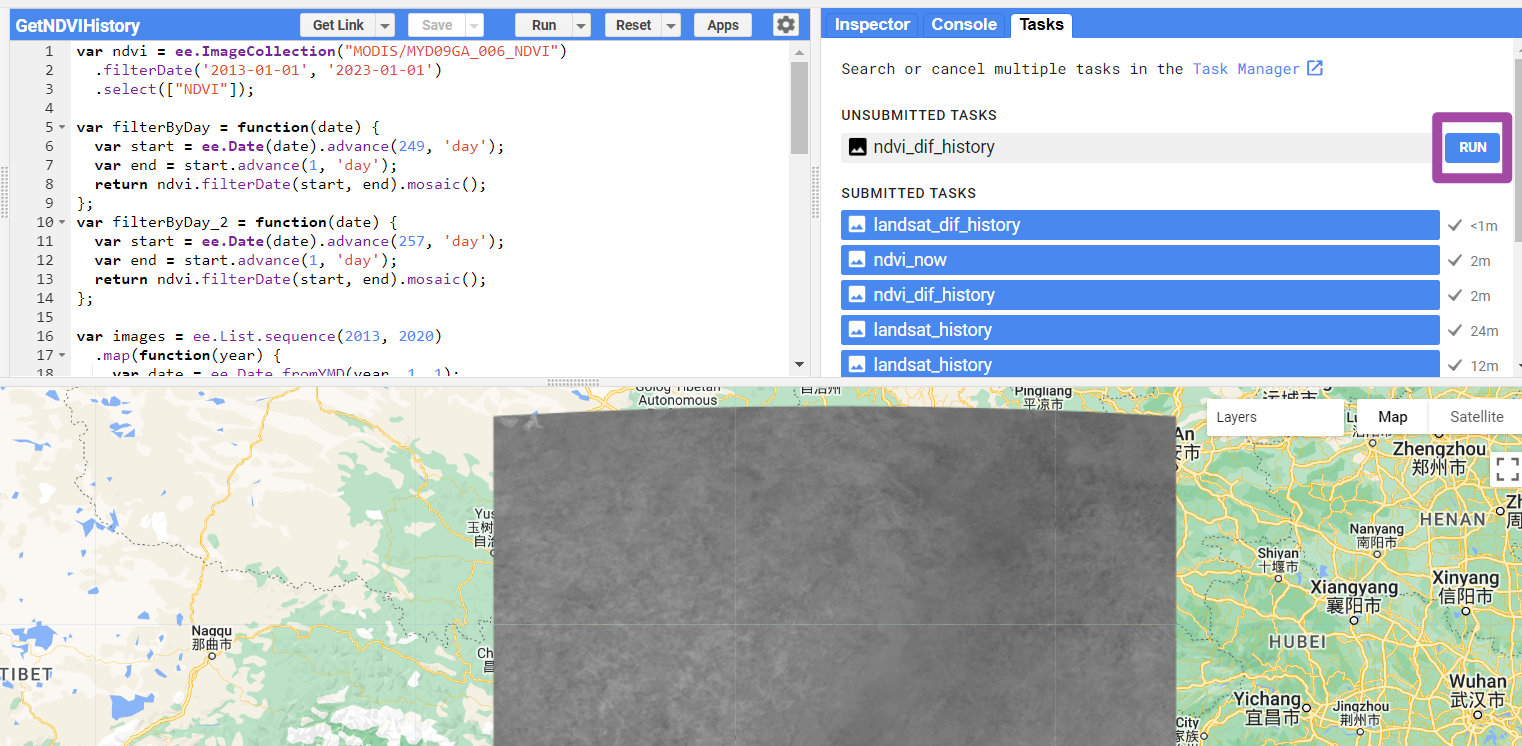
在上图中,点击右侧的“Run”,如下图所示。在其中配置好相关的信息,即可开始结果文件的下载。

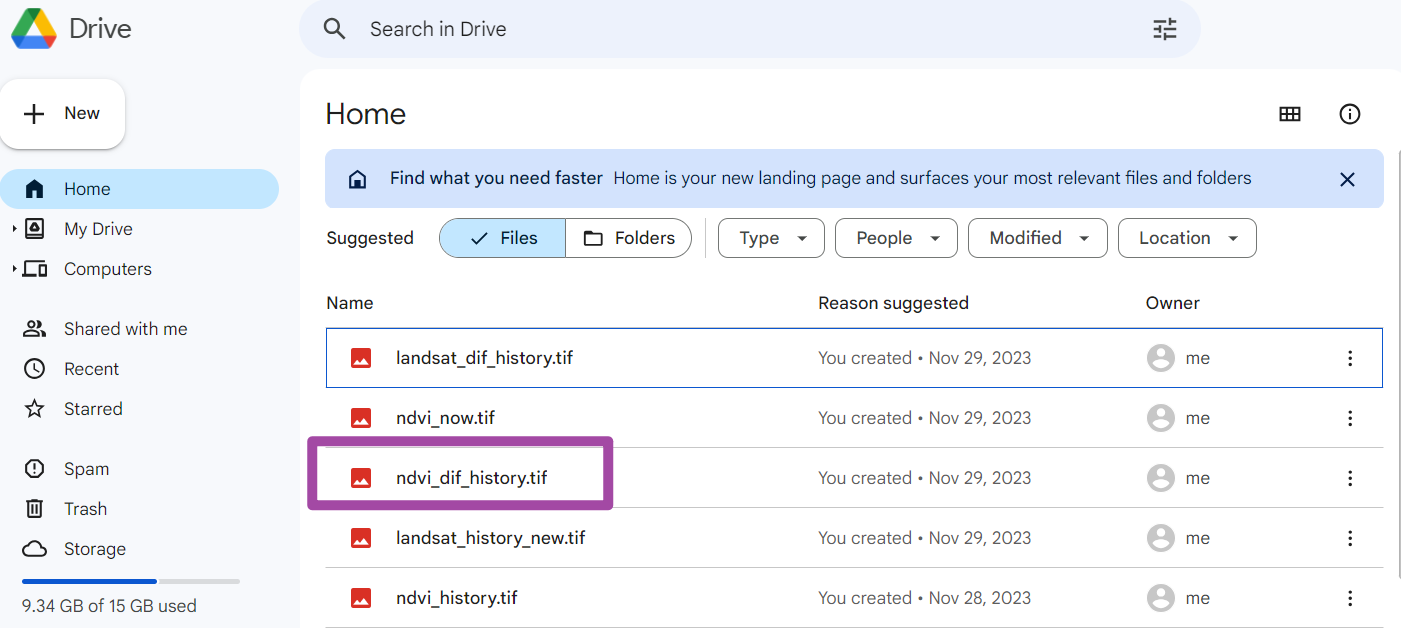
随后,就可以在Google Drive中指定的位置看到我们的结果图像文件了;如下图所示。之后,我们就可以将这一景栅格图像文件下载到本地了。
至此,大功告成。
欢迎关注:疯狂学习GIS