11月29日,德思特2023年度TMTS汽车电子仿真及测试研讨会圆满结束。感谢大家的观看与支持!
在直播间收到一些观众的技术问题,我们汇总了热点问题并请讲师详细解答,在此整理分享给大家,请查收!
面向汽车T-BOX与域控制器的HIL测试新方案
Q:目前全球一共只有100多颗卫星,为什么你们的模拟器需要模拟那么多的通道?有什么应用吗?
卫星数量和模拟仿真通道不是等同的,我们一般在GNSS模拟仿真中的搜星通道一般指的是:每个通道代表一颗卫星输出的一个星座的一个频点。这样算下来的话,如果需要同时仿真世界上所有的卫星与频点,则一共需要上百个通道。此外伴随着多径效应模拟、多待测件/多车模拟,以及一些新的应用,需要的通道数就会更多,我们保证了用户模拟的全面性,以及对于未来的扩展性。此外,这些通道是免费开放给用户的,无需额外付费。

Q:软件定义形式有什么优势呢?我自己也可以搭建?
软件定义顾名思义,就是以软件为核心,一方面他带来了灵活性、扩展性以及经济效益;此外核心软件Skydel带来了大量独特的功能,他不因为硬件的变化而改变,最大程度上提供了高性能仿真能力。我们也欢迎用户自己去搭建GNSS模拟器,在Skydel的基础上,采用自己的硬件,我们有提供丰富的指导文件。
Q:能详细介绍下软件定义架构与硬件驱动的区别吗?
软件定义架构(Software-Defined Architecture)和硬件驱动之间有几个主要的区别:
● 抽象层级:软件定义架构通过在软件中定义和管理资源,引入了一个抽象层级,使得应用程序可以通过软件界面来访问和管理底层资源。而硬件驱动是直接与硬件设备交互的程序。
● 灵活性和可编程性:软件定义架构通过软件配置和管理资源,具有更高的灵活性和可编程性,可以根据需求动态改变资源分配和配置。相比之下,硬件驱动的功能和性能通常是固定的,不容易变更。
● 硬件依赖性:软件定义架构减少对特定硬件的依赖,通过引入抽象层级可以在不同的硬件环境中运行。而硬件驱动通常是为特定硬件设备或芯片定制的,对其他硬件可能不适用。
简而言之,软件定义架构通过软件对资源进行配置和管理,具有灵活性和可编程性,并减少对特定硬件的依赖。而硬件驱动直接与硬件设备交互,是硬件资源的控制和管理。
Q:请问软件在环与硬件在环的具体操作是?
GNSS模拟器在软件在环与硬件在环中的使用方法类似,区别在于是否真正地输出了射频信号。这里我以硬件在环为例进行介绍。
用户实时发送真实的车辆轨迹,并生成相应的GNSS射频信号。图中描绘了一个闭环,其中真实位置传输到系统中,自动驾驶仪应用命令实时影响车辆轨迹。系统中的HIL模拟器和Skydel GNSS模拟器造成的附加延迟必须足够小,来保障不会对自动驾驶仪和GNSS接收器性能的测试和测量产生负面影响。整体系统框图如下:

物理连接上:
a) 物理连接上HIL仿真器和GNSS模拟器采用以太网联接
b) 通信协议采用TCP/IP,真实位置信息传输通过UDP协议
c) 提供开放API用于Skydel软件的开放编程与远程控制
d) 另外需要借助时钟装置对HIL模拟器与GNSS模拟器做同步
此外, 德思特提供了一个Skydel HIL客户端(Skydel HIL Client),这是一个提供简单API的库。强烈建议使用此库,不要尝试与Skydel重新实现通信协议。Skydel HIL客户端需要以太网连接,并且对大多数命令混合使用TCP/IP,对真实位置数据使用UDP。Skydel HIL客户端增加了延迟,延迟主要由以太网连接定义。

软件定义的GNSS模拟器
Q:多实例和多辆车是一个概念吗?
这是一个包含概念,多辆车属于多实例仿真的一种,我们认为在同一台设备内进行的多个独立且实时的仿真场景或轨迹,就是多个实例。因此,多实例可能的情况是:
● 多天线:例如同一辆车或者飞机的多个天线,每根天线独立使用,具有独立的信号采集与分析功能,因此是多实例。
● 多车或多无人机:模拟场景下多个实体的交互、运行等,属于多个独立信号的运行,因此是多实例。
● RTK:因为同时具有基准站与流动站两个独立实体,因此是多实例。

汽车总线物理层测试方案
Q:你们的数字化仪是PCIe什么标准?是不是主机带有匹配的插槽就可以开始使用?对工控机有什么要求吗?
我们不同的数字化仪对应的PCIe标准不一样,低速采集的板卡是4.0的标准, 中高速的采集卡是PCIe8.0或者16.0. 主板带有对应插槽就可以,并且您有8.0的插槽条,可以兼容4.0的插槽。

德思特数字化仪
Q:这个数字化仪有触发输入接口吗?只能采集模拟信号吗?
有的,我们有触发输入的接口,本身的采集通道也可以作为触发通道。数字化仪除了模拟信号,我们还有预留的16个数字IO通道,数字IO和模拟IO可以同时采集。当然如果您只是想获取数字IO,我们也有很多数字IO板卡提供。
汽车大电流注入测试
Q:开环和闭环法怎么选择?依据是什么?
开环和闭环方法是以测试布置为依据来做区分,不同的方法测试布置要求明显不同,测试结果也有差异,相对而言,闭环测试法的要求更加严苛。一般来说,我们测试标准中会有规定需要用哪种测试方法,如果没有规定需要自己选择,那么选择开环还是闭环法主要取决于你的产品设计和测试要求。如果你的产品设计和测试要求较为严格,那么可能需要选择闭环法。如果你的产品设计和测试要求相对较为宽松,那么开环法可能是一个更好的选择。总的来说,选择哪种方法主要取决于你的具体需求和情况。在做出选择时,你可能需要考虑你的产品设计、测试要求以及你的资源和能力。
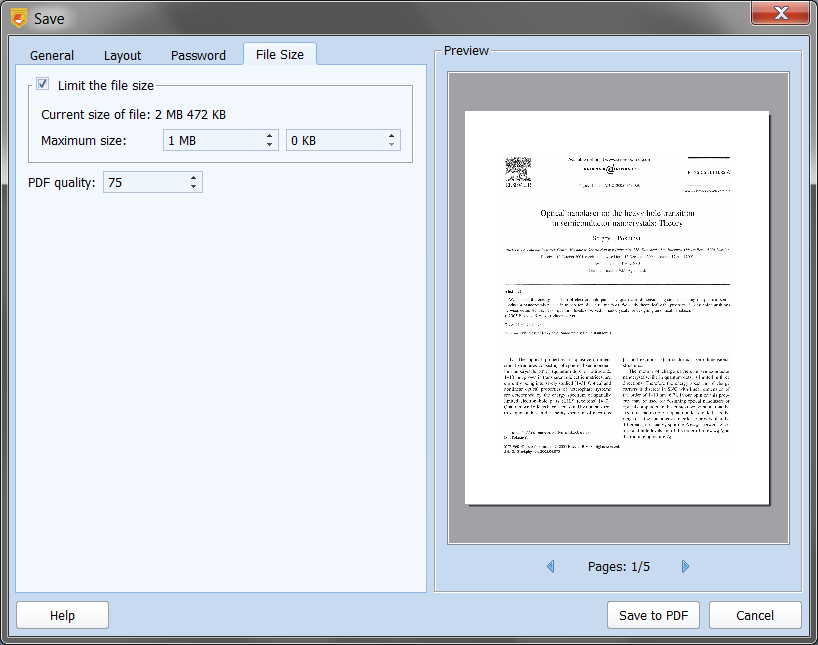
Q:你们的报告生成器可以生成的文件有哪些内容呢?
生成报告分为三个步骤。首先,创建或者选择一个模板文件作为报告的基础。然后设置所需的报告生成器设置。最后生成并检查测试报告。
①模板文件可以采用Microsoft Word、Microsoft Excel或文本格式制作。
②选择模板文件并确定报告内容后即可生成报告,模板文件中包含各个测试的代码(只列举了几项)。

③报告生成器可以生成图形文件和表格文件,报告生成器已进行扩展,不仅可以更轻松地指定应包含哪些图表,而且甚至可以在一个图表中包含多条“线”。可以生成不限于以下内容:
● 组合多条图表线
● 单频段多频段测试中产生的所有数据的记录,包括像辐射抗扰中生成的磁场图
● 可定制的AD通道测量表
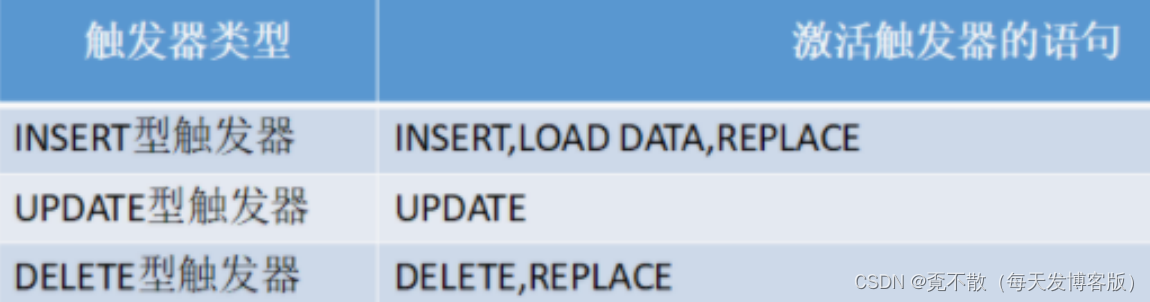
Q:请问你们的套装支持什么标准呢?

从上图可以看出,我们的套装支持,国际标准,国家标准,以及一些军用设备的标准,除了表格中说到的这一些,由于我们能产生大于200 mA的电平等级且产生的频率范围覆盖我国车企的标准。那么我们还支持绝大部分车企的标准。

德思特汽车大电流注入测试方案
汽车传感器仿真和信号分析
Q:我看直播里面讲的传感器仿真是基于压阻式的基本传感器,那对于智能传感器,比如MEMS这种可以仿真吗?
这个比较复杂的智能传感器集成了部分芯片,主控在里面,这个是我们仿真板卡做不到的。不过这种情况,一般是针对于自动驾驶里面应用居多,都是在软件层上去做仿真模拟。如果您有这种仿真测试的集成需求,也可以找我们,我们背靠研发团队,是可以给您完全的解决方案的。
Q:如果我想做一套故障注入的测试系统,但是想用网线去控制,可以实现吗?
这个也是可以做到的,我们有这种LXI机箱,插入PXI板卡,可以通过以太网或者USB去控制。
面向自动驾驶与智慧城市的C-V2X与C-ITS方案
Q:Sdk 支持哪些软件语言,或者软件集成开发环境?
支持C和Python的语言。软件集成开发环境要求如下:
1.操作系统要求:Ubuntu Linux 18.04或更高版本。
2.V2X设备要求:安装、授权并运行德思特V2X软件堆栈。
3.Python SDK要求:
- pip3包管理器,用于安装Python软件包。
- Python 3.7或更高版本,用于运行Python示例。
4.C SDK要求:
- 开发者环境,例如build-essentials、cmake等,可以从.c源代码生成可执行文件并运行
Q:你们提供的这个应用程序和高德、百度这些有什么区别?
最大的区别就是它显示基于V2X的数据,并显示情境警告。例如前方碰撞警告等一系列的应用场景,可以在车载显示屏上显示,也可以与后视镜集成,相较于直接使用手机会有更大的安全性,不易分散注意力。而且是不需要蜂窝网络连接就能实现提醒,在没有信号的情况下或者信号差的情况下也可以使用。
Q:你们的V2X协议栈有指定的硬件?
我们的V2X协议栈没有指定硬件,它支持国际上目前常用的ETSl、ISO、IEEE、SAE、CAICT、CAICV、CCSA定义的标准和指令,以及C2C-CC、C-Roads、NISSTC的配置文件。

德思特C-V2X与C-ITS方案
Q:V2X消息接口怎么访问呢?
我们的V2X堆栈提供了SDK,可以整合车辆数据(例如CAN接口提取的专有车辆数据等)发送来源更加丰富的V2X消息,也可以是发送自定义的V2X消息,同时可以处理接收到的设备消息(包括其他车辆和道路基础设施、传感器等)和自定义消息。更多详细信息可以联系德思特技术工程师获取《德思特V2X软件栈和SDK的使用指南》,其中对于具体案例和访问方法都有介绍。