目录
一、蜂鸣器驱动原理
二、硬件原理分析
三、实验程序编写
1、 修改设备树文件
(1)添加pinctrl节点
(2)添加BEEP设备节点
(3)检查PIN 是否被其他外设使用
2、蜂鸣器驱动程序编写
3、编写测试APP
四、运行测试
一、蜂鸣器驱动原理
蜂鸣器常用于计算机、打印机、报警器、电子玩具等电子产品中,常用的蜂鸣器有两种:有源蜂鸣器和无源蜂鸣器,这里的有“源”不是电源,而是震荡源,有源蜂鸣器内部带有震荡源,所以有源蜂鸣器只要通电就会叫。无源蜂鸣器内部不带震荡源,直接用直流电是驱动不起来的,需要2K-5K 的方波去驱动。I.MX6U-ALPHA 开发板使用的是有源蜂鸣器,因此只要给其供电就会工作,I.MX6U-ALPHA 开发板所使用的有源蜂鸣器如下图所示:

有源蜂鸣器只要通电就会叫,所以我们可以做一个供电电路,这个供电电路可以由一个IO来控制其通断,一般使用三极管来搭建这个电路。为什么我们不能像控制LED 灯一样,直接将GPIO 接到蜂鸣器的负极,通过IO 输出高低来控制蜂鸣器的通断。因为蜂鸣器工作的电流比LED 灯要大,直接将蜂鸣器接到I.MX6U 的GPIO 上有可能会烧毁IO,所以我们需要通过一个三极管来间接的控制蜂鸣器的通断,相当于加了一层隔离。
二、硬件原理分析

上图中通过一个PNP 型的三极管8550 来驱动蜂鸣器,通过SNVS_TAMPER1 这个IO来控制三极管Q1 的导通,当SNVS_TAMPER1 输出低电平的时候Q1 导通,相当于蜂鸣器的正极连接到DCDC_3V3,蜂鸣器形成一个通路,因此蜂鸣器会鸣叫。同理,当SNVS_TAMPER1输出高电平的时候Q1 不导通,那么蜂鸣器就没有形成一个通路,因此蜂鸣器也就不会鸣叫。
三、实验程序编写
1、 修改设备树文件
(1)添加pinctrl节点
I.MX6U-ALPHA开发板上的BEEP使用了SNVS_TAMPER1 这个PIN,打开imx6ull-alientekemmc.dts,在iomuxc 节点的imx6ul-evk 子节点下创建一个名为“pinctrl_beep”的子节点,节点内容如下所示:
pinctrl_beep: beepgrp{fsl,pins = <MX6ULL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x10B0>;};(2)添加BEEP设备节点
在根节点“/”下创建BEEP 节点,节点名为“beep”,节点内容如下:
beep{#address-cell = <1>;#size-cell = <1>;compatible = "atkalpha-beep";pinctrl-names = "defaults";pinctrl-0 = <&pinctrl_beep>;beep-gpio = <&gpio5 1 GPIO_ACTIVE_HIGH>;status = "okay";};(3)检查PIN 是否被其他外设使用
此先检查PIN 为SNVS_TAMPER1这个PIN 有没有被其他的pinctrl 节点使用,如果有使用的话就要屏蔽掉,然后再检查GPIO5_IO01 这个GPIO 有没有被其他外设使用,如果有的话也要屏蔽掉。
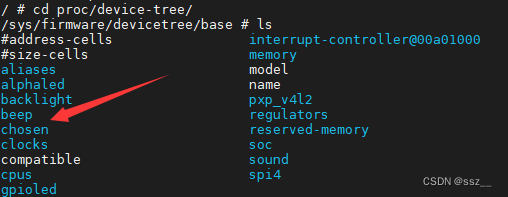
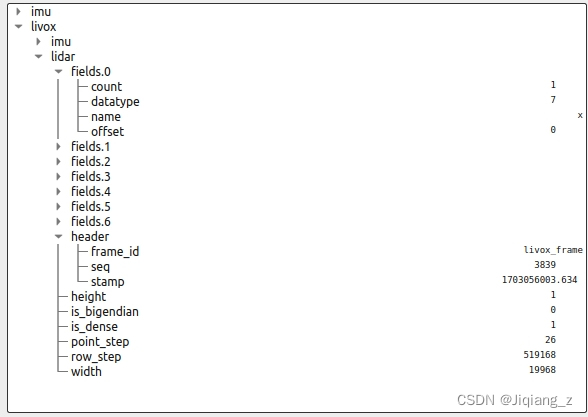
设备树编写完成以后使用“make dtbs”命令重新编译设备树,然后使用新编译出来的imx6ull-alientek-emmc.dtb 文件启动Linux 系统。启动成功以后进入“/proc/device-tree”目录中查看“beep”节点是否存在,如果存在的话就说明设备树基本修改成功(具体还要驱动验证),结果如下图所示:
2、蜂鸣器驱动程序编写
编写beep.c文件:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define BEEP_CNT 1 //设备号个数
#define BEEP_NAME "beep" //名字
#define BEEPOFF 0 //关蜂鸣器
#define BEEPON 1 //开蜂鸣器struct beep_dev
{dev_t devid; //设备号struct cdev cdev; //cdevstruct class *class; //类struct device *device; //设备int major; //主设备号int minor; //次设备号struct device_node *nd; //设备节点int beep_gpio; //beep所使用的GPIO编号
};struct beep_dev beep; //beep设备//打开设备
static int beep_open(struct inode *inode, struct file *filp)
{filp->private_data = &beep; //设置私有数据return 0;
}//向设备写数据
static ssize_t beep_write(struct file *filp, const char __user *buf,size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char beepstat;struct beep_dev *dev = filp->private_data;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0){printk("kernel write failed!\r\n");return -EFAULT;}beepstat = databuf[0]; //获取状态值if(beepstat == BEEPON){gpio_set_value(dev->beep_gpio, 0); //8550三极管是PNP型,高电压截至,低电压导通}else if (beepstat == BEEPOFF){gpio_set_value(dev->beep_gpio, 1); //关闭蜂鸣器}return 0;
}//释放设备
static int beep_release(struct inode *inode, struct file *filp)
{return 0;
} //设备操作函数
static struct file_operations beep_fops = {.owner = THIS_MODULE,.open = beep_open,.write = beep_write,.release = beep_release,
};//驱动入口函数
static int __init beep_init(void)
{int ret = 0;//设置BEEP所使用的GPIO//1、获取设备节点:beepbeep.nd = of_find_node_by_path("/beep");if(beep.nd == NULL){printk("beep node not find!\r\n");return -EINVAL;}else{printk("beep node find!\r\n");}//2、获取设备树中的gpio属性,得到BEEP所使用的GPIO编号beep.beep_gpio = of_get_named_gpio(beep.nd, "beep-gpio", 0);if (beep.beep_gpio < 0){printk("can't get beep-gpio");return -EINVAL;}printk("led-gpio num = %d\r\n", beep.beep_gpio); //3、设置GPIO5_IO01为输出,并且输出高点平,默认关闭BEEPret = gpio_direction_output(beep.beep_gpio, 1);if(ret < 0){printk("can't set gpio!\r\n");}//注册字符设备驱动//1、创建设备号if(beep.major)//定义了设备号{beep.devid = MKDEV(beep.major, 0);register_chrdev_region(beep.devid,BEEP_CNT,BEEP_NAME);}else//没有定义设备号{alloc_chrdev_region(&beep.devid, 0, BEEP_CNT, BEEP_NAME);beep.major = MAJOR(beep.devid);//获取分配号的主设备号beep.minor = MINOR(beep.devid);//获取分配号的次设备号}printk("beep major = %d, minor = %d\r\n",beep.major, beep.minor);//2、初始化cdevbeep.cdev.owner = THIS_MODULE;cdev_init(&beep.cdev, &beep_fops);//3、添加一个cdevcdev_add(&beep.cdev, beep.devid, BEEP_CNT);//4、创建类beep.class = class_create(THIS_MODULE,BEEP_NAME);if (IS_ERR(beep.class)){return PTR_ERR(beep.class);}//5、创建设备beep.device = device_create(beep.class, NULL, beep.devid, NULL, BEEP_NAME);if(IS_ERR(beep.device)){return PTR_ERR(beep.device);}return 0;
}
//驱动出口函数
static void __exit beep_exit(void)
{//注销字符设备驱动cdev_del(&beep.cdev); //删除cdevunregister_chrdev_region(beep.devid, BEEP_CNT); //删除设备号device_destroy(beep.class, beep.devid);class_destroy(beep.class);
}module_init(beep_init);
module_exit(beep_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ssz");3、编写测试APP
编写测试文件beepApp.c:
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <string.h>#define BEEPOFF 0
#define BEEPON 1int main(int argc, char *argv[])
{int fd,retvalue;char *filename;unsigned char databuf[1];if (argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];//打开beep驱动fd = open(filename ,O_RDWR);if(fd < 0){printf("file %s open failed!\r\n",argv[1]);return -1;}databuf[0] = atoi(argv[2]);//向/dev/beep文件写入数据retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("BEEP Control Failed!\r\n");close(fd);return -1;}retvalue = close(fd); //关闭文件if(retvalue < 0){printf("file %s close failed!\r\n",argv[1]);return -1;}return 0;
}四、运行测试
同前面章节步骤。





![[Angular] 笔记 19:路由参数](https://img-blog.csdnimg.cn/direct/c4779e2ff2ac464189ca39dca4f57d2a.png)