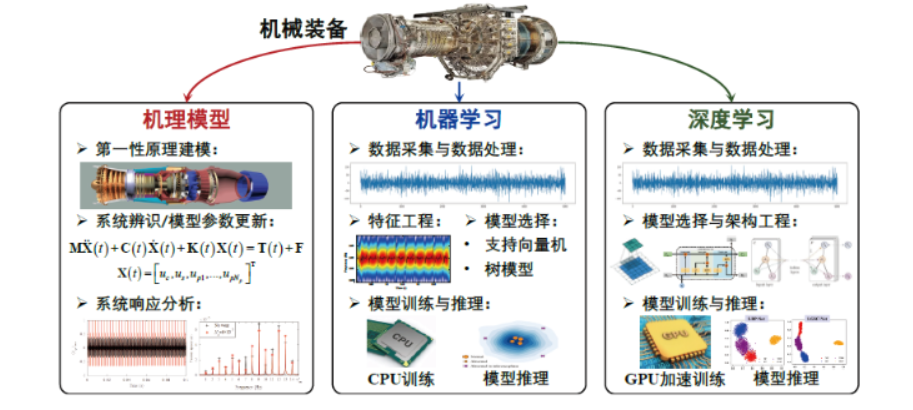
Gazebo 提供了一个实时的三维虚拟环境,用于模拟各种复杂的真实世界条件,包括光照、地形、物理碰撞以及传感器模型(如激光雷达、摄像头等)。通过 ROS 和 Gazebo 的结合,开发者可以在无需实际硬件的情况下设计、测试和验证机器人算法及系统。
一、Gazebo 的主要特点:
三维仿真:提供高保真度的视觉效果和真实的物理引擎,使得机器人的运动和交互行为能够尽可能接近真实情况。
丰富的模型库:内置了大量不同类型的机器人模型和环境组件,用户也可以自定义模型并导入到 Gazebo 中使用。
传感器模拟:支持多种传感器的模拟,包括但不限于激光雷达、深度相机、RGB-D相机、IMU 等,这些传感器的数据可以以 ROS 消息的形式发布出来供其他节点订阅处理。
实时仿真:支持实时或非实时运行,允许调整时间步长来满足不同的性能需求。
API接口:提供了 C++ 和 Python API,方便用户编写自定义逻辑并与仿真环境交互。
二、URDF 与 Gazebo 集成流程
主要步骤如下:
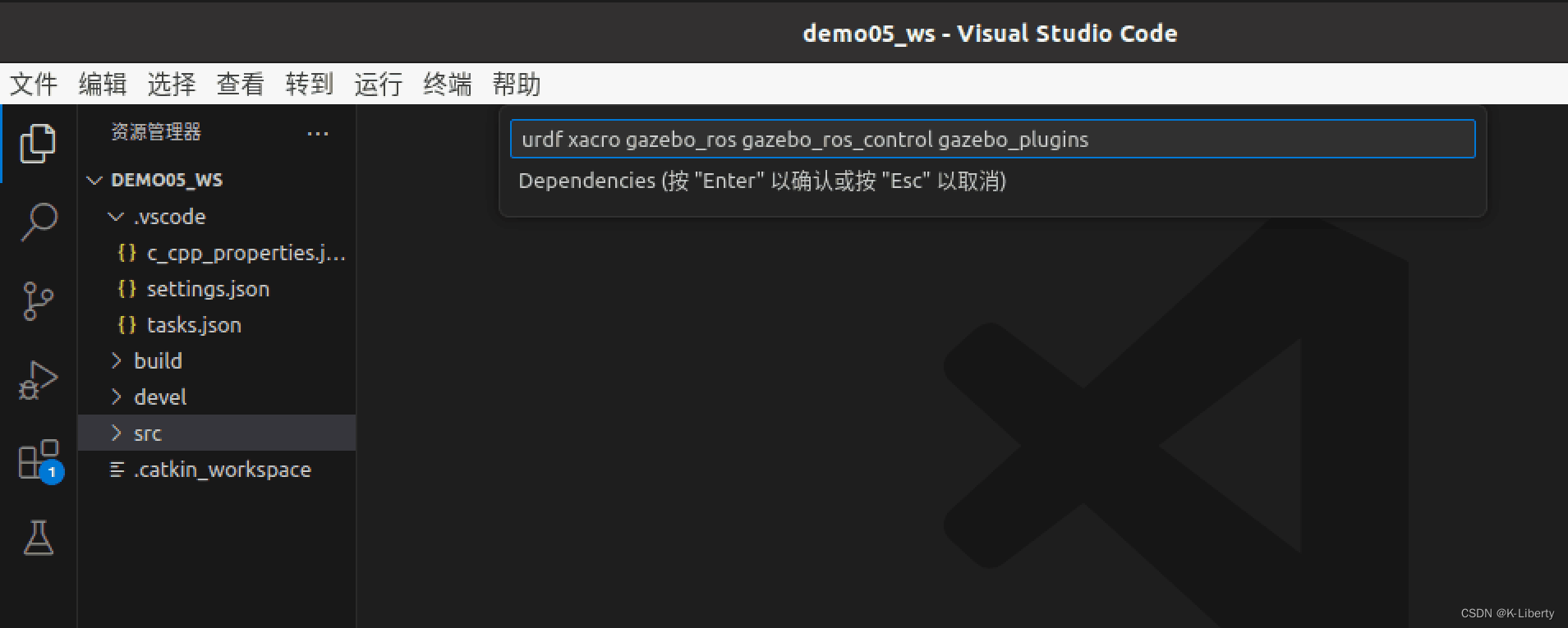
1、创建功能包,导入依赖项
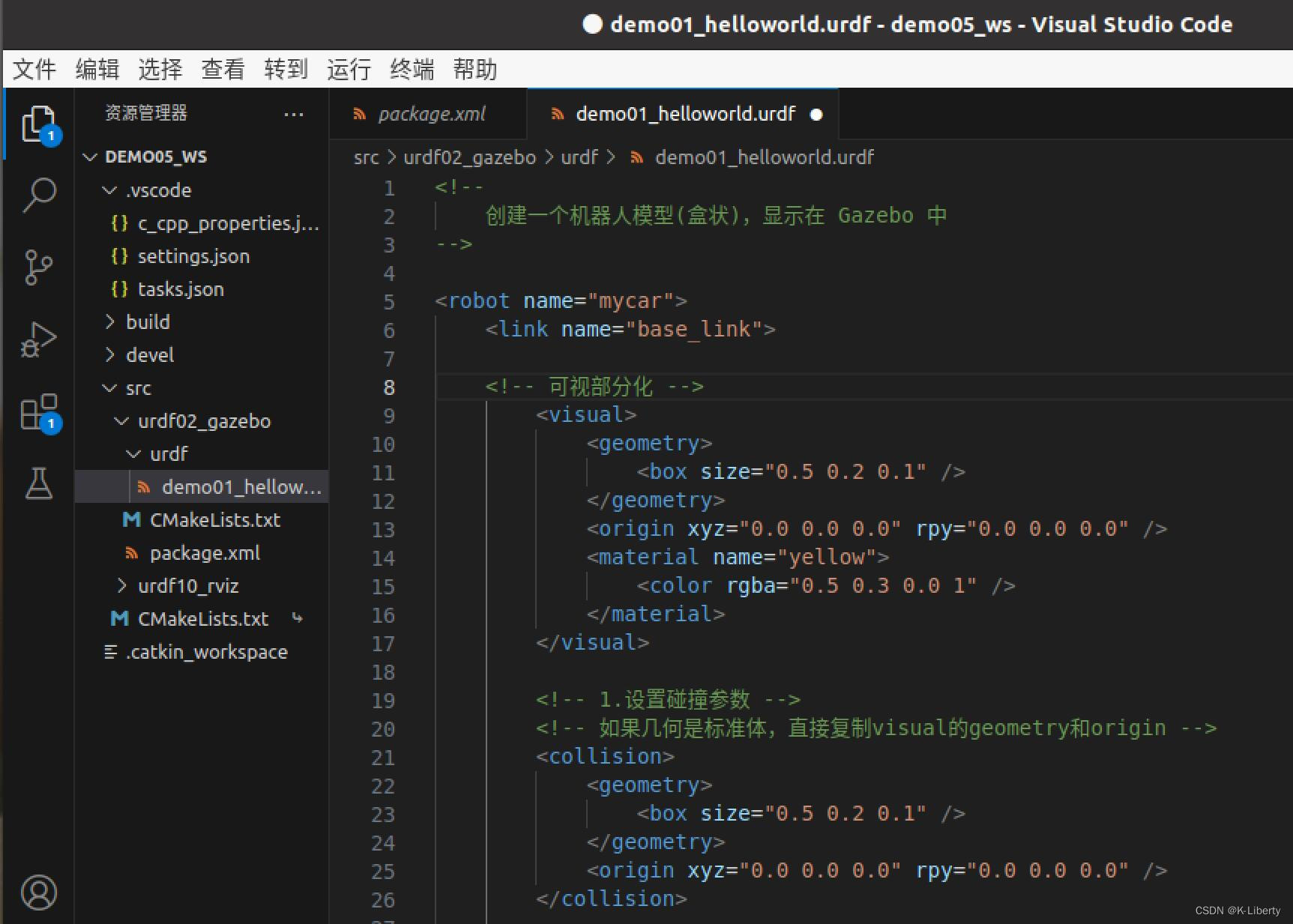
2、编写 URDF 或 Xacro 文件
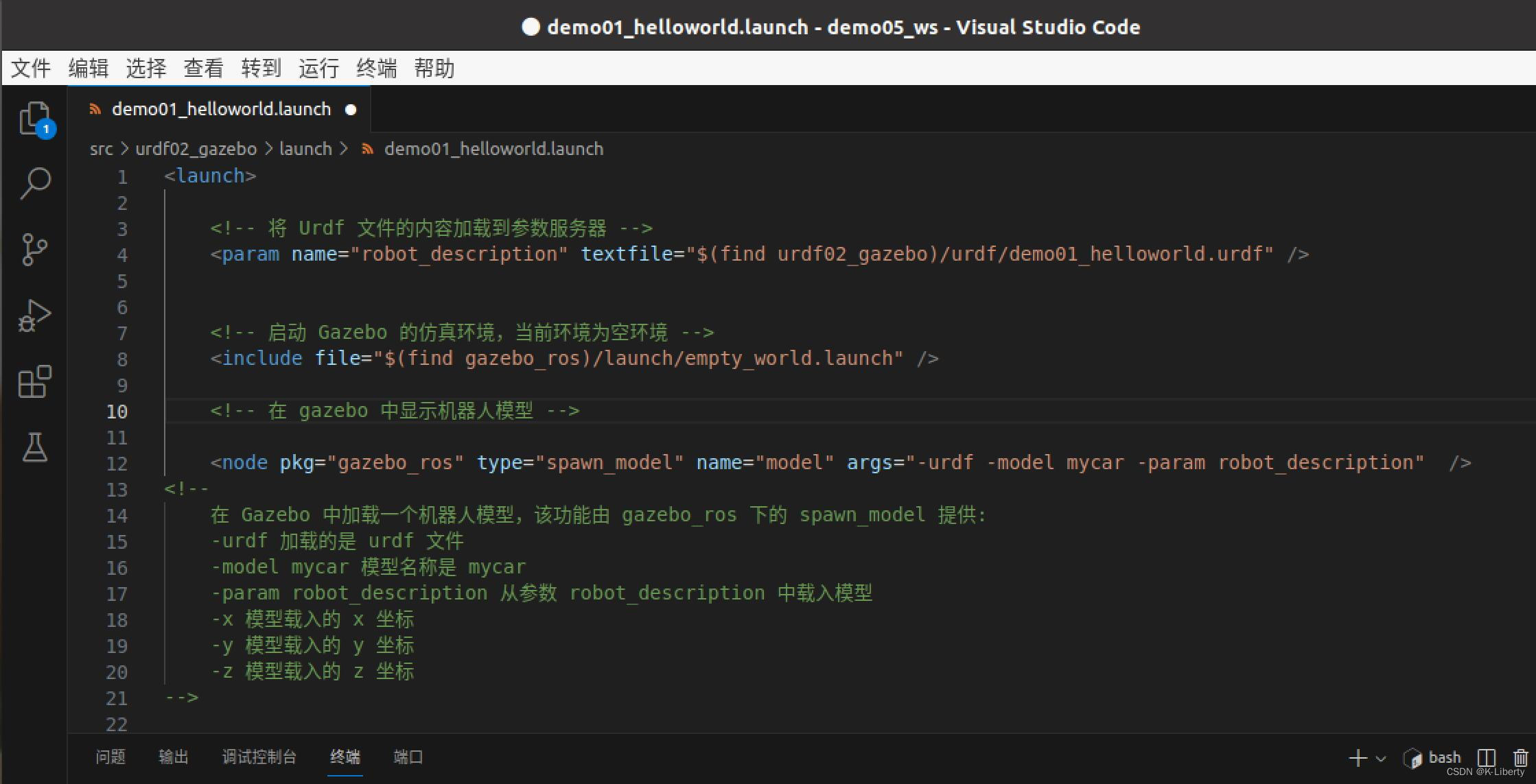
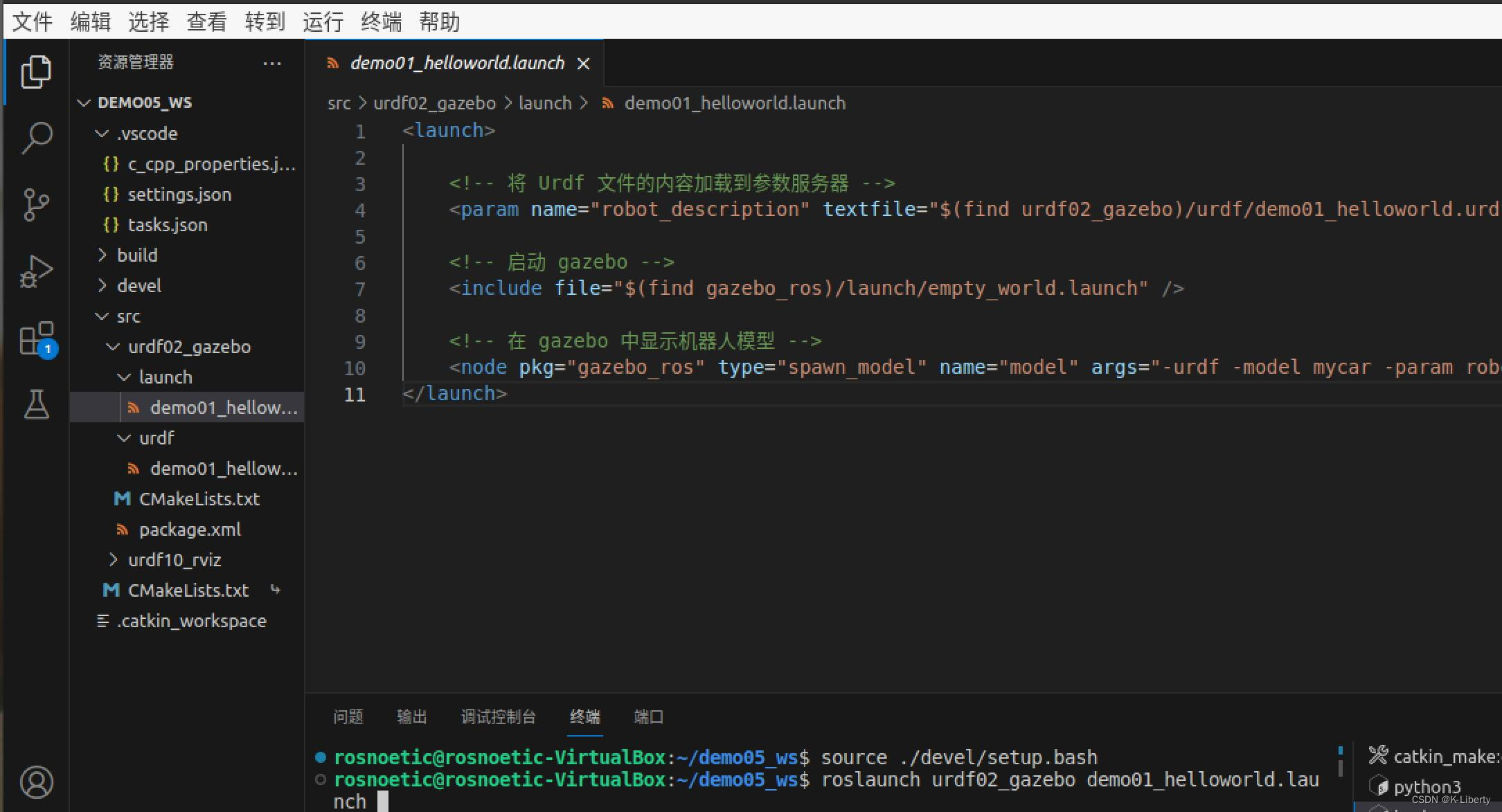
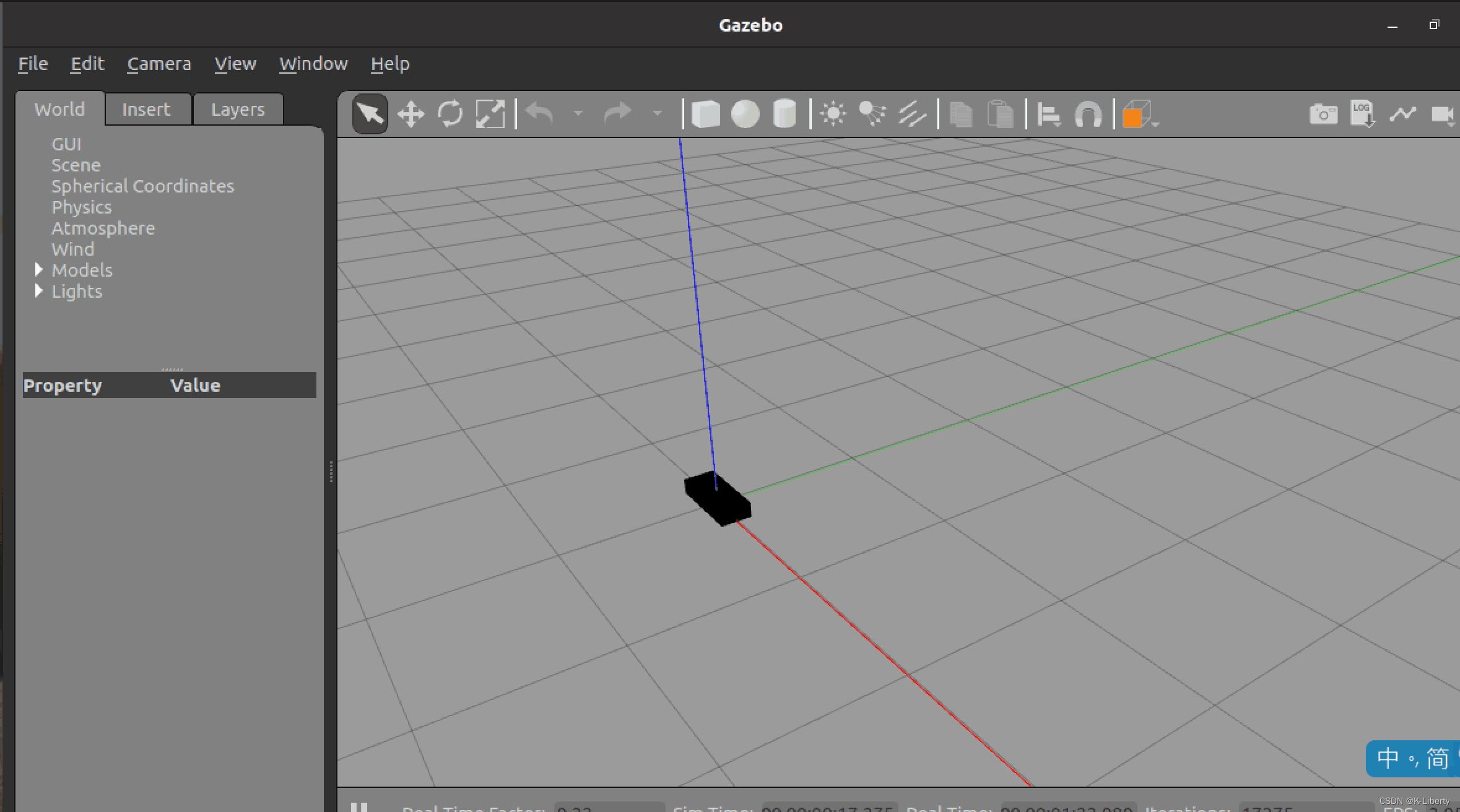
3、启动 Gazebo 并显示机器人模型
导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
三、URDF集成Gazebo相关设置
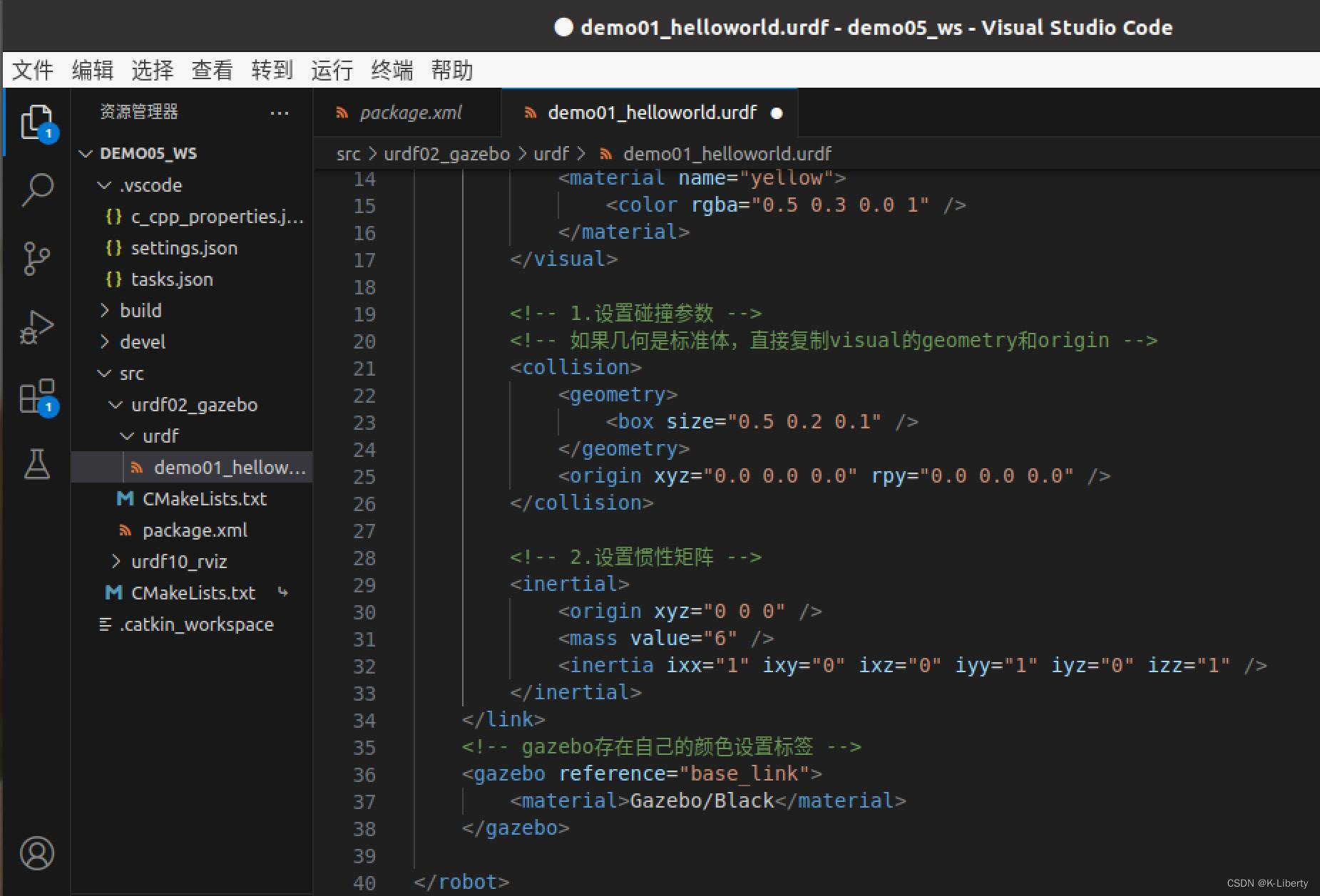
1.collision
若机器人link是标准的几何体形状,和link的 visual 部分属性设置一致。
2.inertial
惯性矩阵的设置需要结合link的质量与外形参数动态生成
注意:除了 base_footprint 外,机器人的每个刚体部分都需要设置惯性矩阵,且惯性矩阵必须经计算得出,如果随意定义刚体部分的惯性矩阵,那么可能会导致机器人在 Gazebo 中出现抖动,移动等现象。
3.颜色设置
在 gazebo 中显示 link 的颜色,必须要使用指定的标签:
<gazebo reference="link节点名称">
<material>Gazebo/Blue</material>
</gazebo>
注意:material 标签中,设置的值区分大小写。