配置静态ip(可以联网)
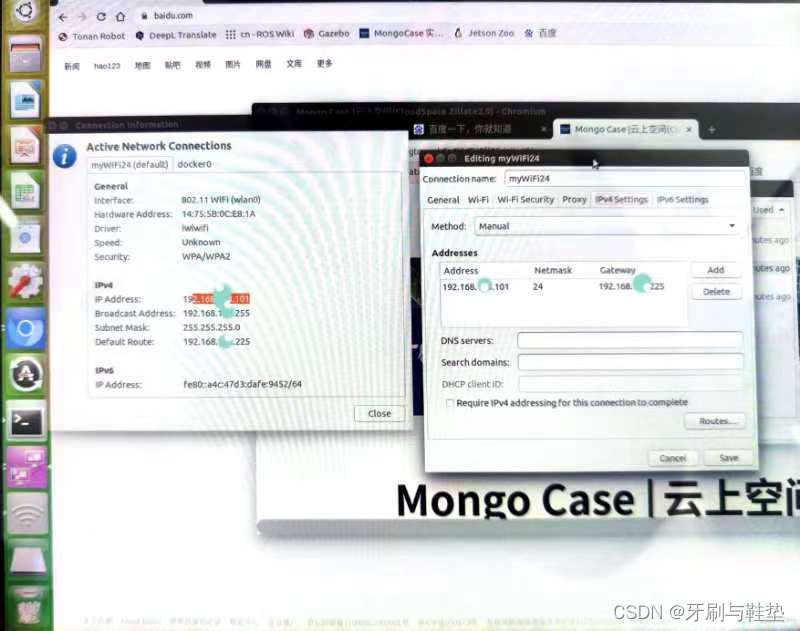
首先在你正常链接网络的时候打开“Connection Information”(我的是wifi,而且是手机热点,所以我手机就相当于一台路由器)
查看路由ip

观察到Default Route 是192.168.***.225这就是我手机的地址,同理这也是路由器的地址(所有打码的位置都是一个值)
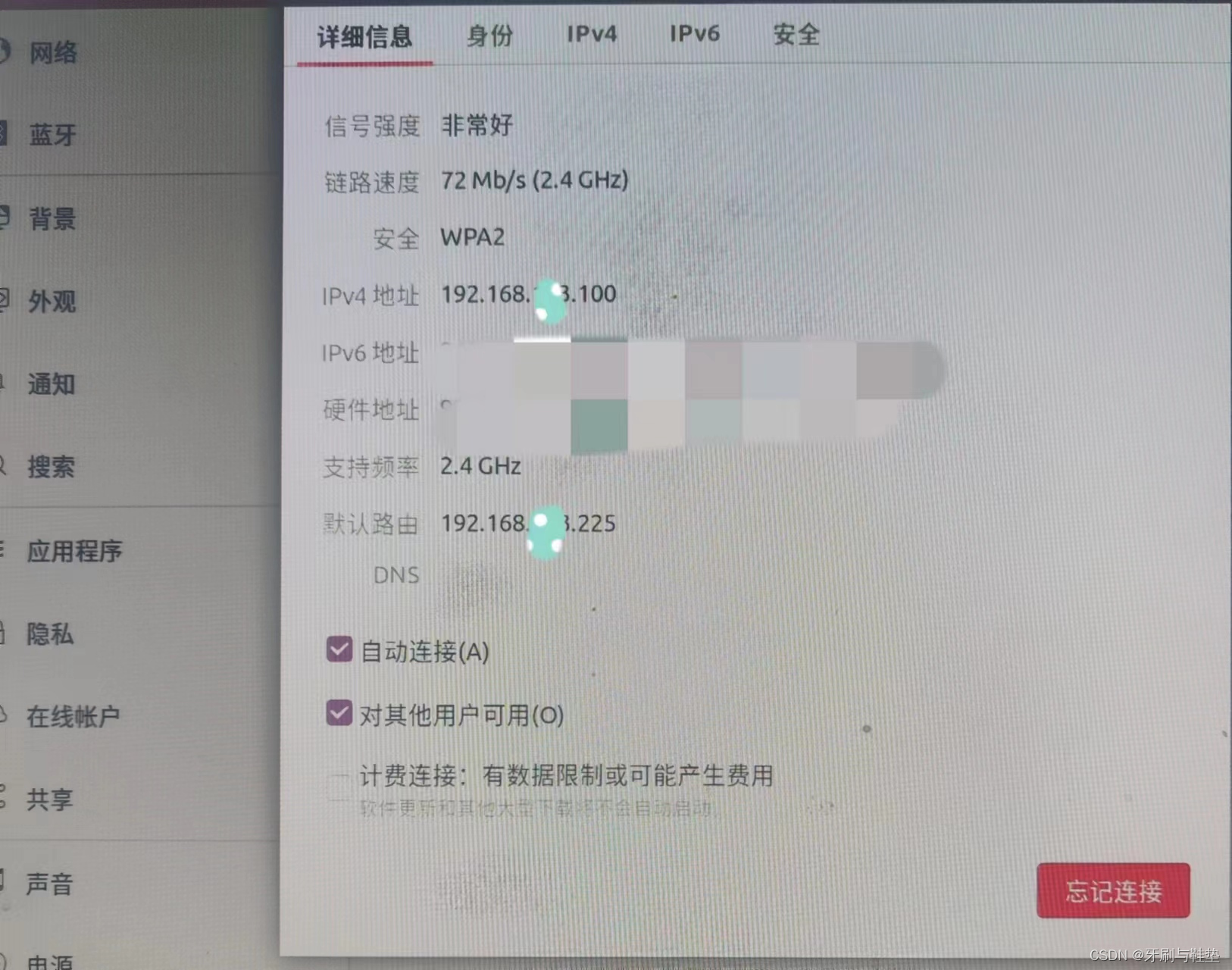
上面这个图不同的Linux系统显示的也不一样,比如说ubuntu20.04中就是下图中的“默认路由器”,所以就留意route和路由的字眼就可以。
配置静态ip
信息填写
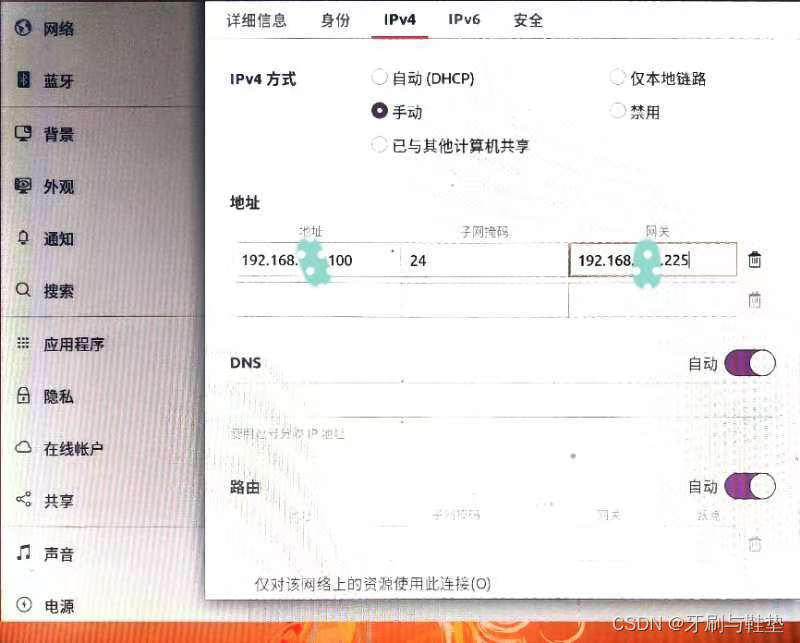
打开你连接的网络的ipv4界面,填写对应的信息,
address,你想要的任意ip,但是需要和路由ip的前三段是一样的,只有最后那一段是可以随便写的。
netmask,这里是网关,你写24或255.255.255.0都行
gateway,这是最重要的关系到你能不能上网,写路由的地址!就是上一步我们查看的那个ip!
另外ubuntu20.04 的静态ip配置如下图所示(只是界面有所不同而已)
 保存并应用配置
保存并应用配置
点击save
断开wifi,重新连接wifi,此时你的ip就变成你想要的静态ip了
最后测试
ping baidu.com
数据正常发送与接受,就证明静态ip成功配置(可正常上网)
如果WiFi上有个问号那么参照下面的文章解决
https://blog.csdn.net/qq_45642410/article/details/113790686
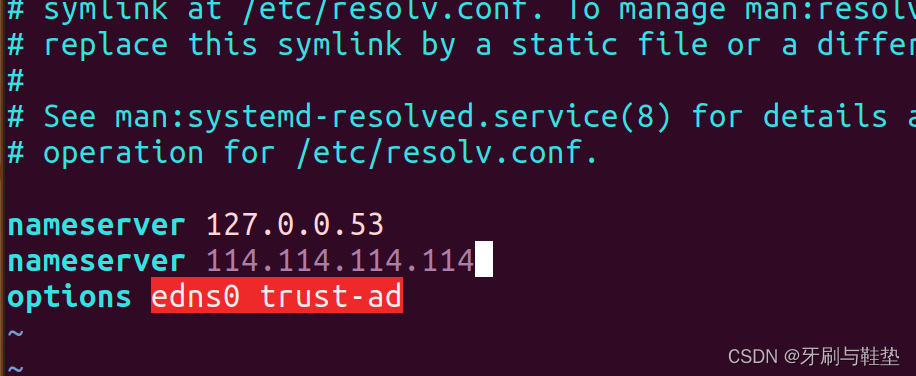
如果 ping baidu.com 显示暂时不能解析域名
那么 证明电脑已经加入了wifi但是dns配置错误
输入
sudo vim /etc/resolv.conf
编辑文件,在nameserver段添加114.114.114.114的dns解析
保存后,即可正常链接网络~~~~~
roscore 打不开
卸载ros 重新安装ros-melodic
sudo apt-get remove ros-*
sudo wget http://fishros.com/install -O fishros && . fishros
按要求安装melodic桌面版
修改配置文件(这一步不要操作,被我废弃,它会导致通过ssh远程开启rviz的时候失败)
gedit ~/.bashrc
打开的文件中修改对应字段如下
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
通过主机控制小车上的ros
树莓派4B +Ubuntu20.04+ROS1的使用(2)-CSDN博客
到这一步我们就可以基于ssh远程遥控小车上的ros节点了。下一步的工作将是在此基础上对小车总ROS节点程序的替换。