文章目录
- 一:EXTI外部中断(external interrupt)
- 1.1 STM32 中断系统
- 1.2 STM32外部中断EXTI
- 1.3 实验:对射式红外传感器计次
- 1.31 编程感想
- 1.4 实验:旋转编码器计次
- 1.41 编程感想
- 道友:没有永久的巅峰也没有永远的低谷,真正的强大不是忘记而是接受,接受世事无常、接受孤独挫败、接受突如其来的无力感、接受自己的不完美、接受困惑不安的焦虑和遗憾。
一:EXTI外部中断(external interrupt)
1.1 STM32 中断系统
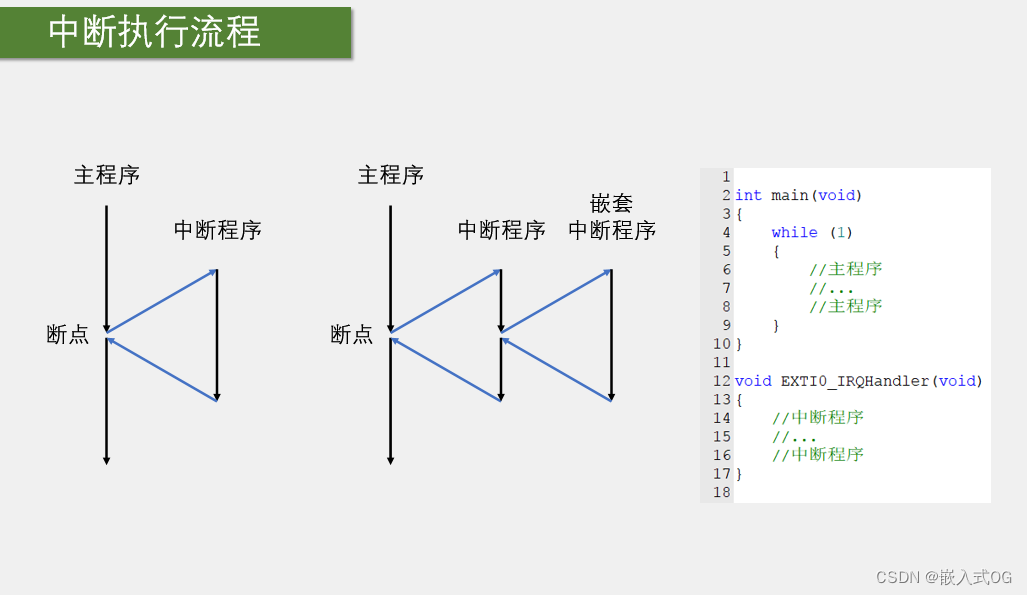
中断是指在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续执行,当中断发生时是由硬件自动调用中断函数执行的,期间编译器会保护现场最后还原现场。使得中断系统极大程度地提高程序的效率,就像是给自己定闹钟,可以不用担心错过时间而可以安心睡觉,在这个过程中,有如下概念:
- 中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源。
- 中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回。
stm32的F1系列总共有68个可屏蔽中断通道(中断源),包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设。所有的中断使用嵌套向量中断控制器NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级。具体到某一个型号的芯片可能不会有这多中断,具体需要查看的芯片手册。下面是手册中的中断向量表节选:

- 地址(最后一列):存储中断地址,这个地址列表也称为中断向量表。因为程序中的中断函数地址由编译器来分配,所以中断函数地址不固定。但由于硬件的限制,中断跳转只能跳转到固定的地址执行程序。所以为了让硬件能跳转到(一个地址不固定的)中断函数里,就需要在内存中定义一个固定的地址列表。当中断发生后,首先跳转到这个固定的地址列表,编译器会在这个固定的位置加上一条跳转到中断函数的代码,于是中断跳转就可以跳转到任意位置了。中断地址列表就是中断向量表,相当于是中断跳转的跳板。C语言编程无需关注中断向量表,汇编语言需要。
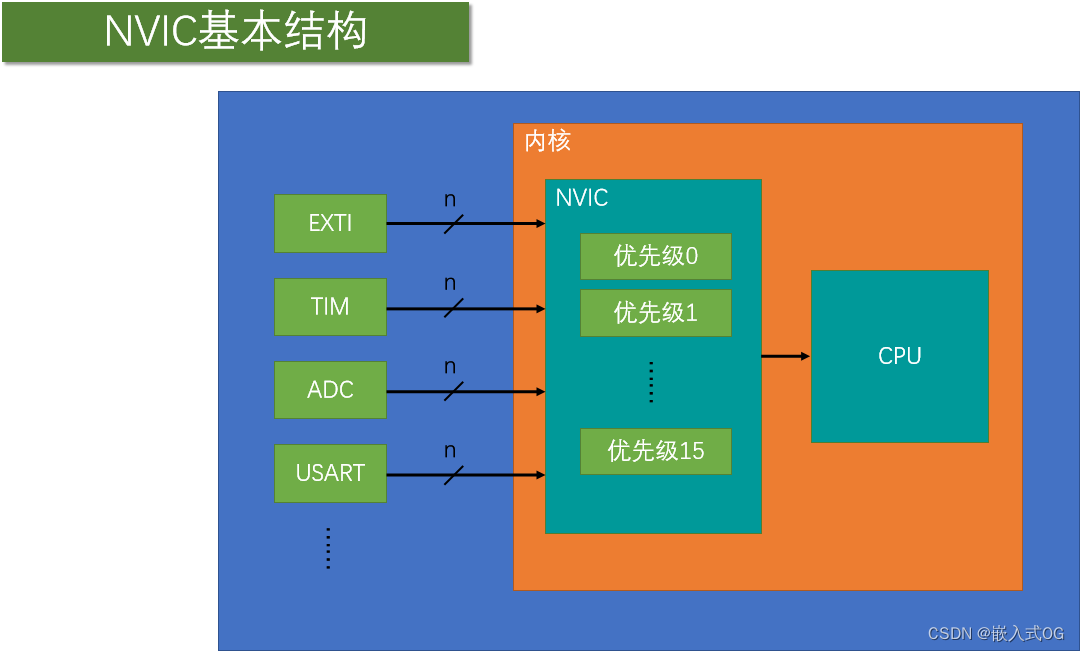
上图给出了嵌套向量中断控制器NVIC的基本结构示意图。在stm32中,NVIC用于统一管理中断和分配中断优先级,属于内核外设,是CPU的小助手,可以让CPU专注于运算。从上图可以看出:
- NVIC有很多输入口,每个都代表一个中断线路,如EXTI、TIM、ADC等。
- 每个中断线路上的斜杠n表示n条线,因为一个外设可能会同时占用多个中断通道。
- NVIC只有一个输出口,通过中断优先级确定中断执行的顺序。
NVIC的中断优先级由优先级寄存器的4位二进制(十进制0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低(4-n)位的响应优先级。
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队。这个中断号就是指中断向量表的第二列“优先级”。
用医院的叫号系统来举例子。假设医生正在给某个病人看病,外面还有很多病人排队:
- 新来的病人 抢占优先级高就相当于直接进屋打断医生,给自己看病。
- 新来的病人 响应优先级高就相当于不打扰医生,但直接插队,排在队伍的第一个。
下表是NVIC优先级的分组方式
| 分组方式 | 抢占优先级 | 响应优先级 |
|---|---|---|
| 分组0(n = 0) | 0位,取值为0 | 4位,取值为0~15 |
| 分组1(n = 1) | 1位,取值为0~1 | 3位,取值为0~7 |
| 分组2(n = 2) | 2位,取值为0~3 | 2位,取值为0~3 |
| 分组3(n = 3) | 3位,取值0~ 7 | 1位,取值为0~ 1 |
| 分组4(n = 4) | 4位,取值为0~15 | 0位,取值为0 |
注:NVIC是内核外设,更多关于NVIC的介绍参考“STM32F10xxx Cortex-M3编程手册”。 NVIC
- 中断分组的配置寄存器,在SCB_AIRCR中,PRIGROUP这三位就是用于配置中断分组的。
1.2 STM32外部中断EXTI
下图是外部中断向量表片选

中断系统是管理和执行中断的逻辑结构,外部中断是众多能产生中断的外设之一,而EXTI就是其中之一(比如USART、I2C,参考上面的NVIC基本结构),上图给出了外部中断向量表。EXTI(external interrupt)外部中断可以监测指定的GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使得CPU执行EXTI对应的中断程序。
- 支持的触发方式:上升沿/下降沿/双边沿/软件触发(上升沿就是低电平到高电平触发)
- 支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断(比如gpioa_Pin1与gpiob_pin1不能同时触发中断)。
- 通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒,共20个。
注:后面这四个功能是为了实现一些特殊的功能,比如想实现某个时间让stm32退出停止模式,由于外部中断可以在低功耗模式的停止模式下唤醒stm32,就可以在GPIO口上连接一个RTC时钟作为外部中断。
- 触发响应方式:中断响应/事件响应。
- 注意:
中断响应就是正常的中断流程,申请中断让CPU执行中断函数;- 事件响应就是外部中断发生时,不把外部信号给CPU,而是选择触发一个事件,将这个信号通向其他外设,来触发其他外设的操作,可以实现外设之间的联合工作(中介分包)。
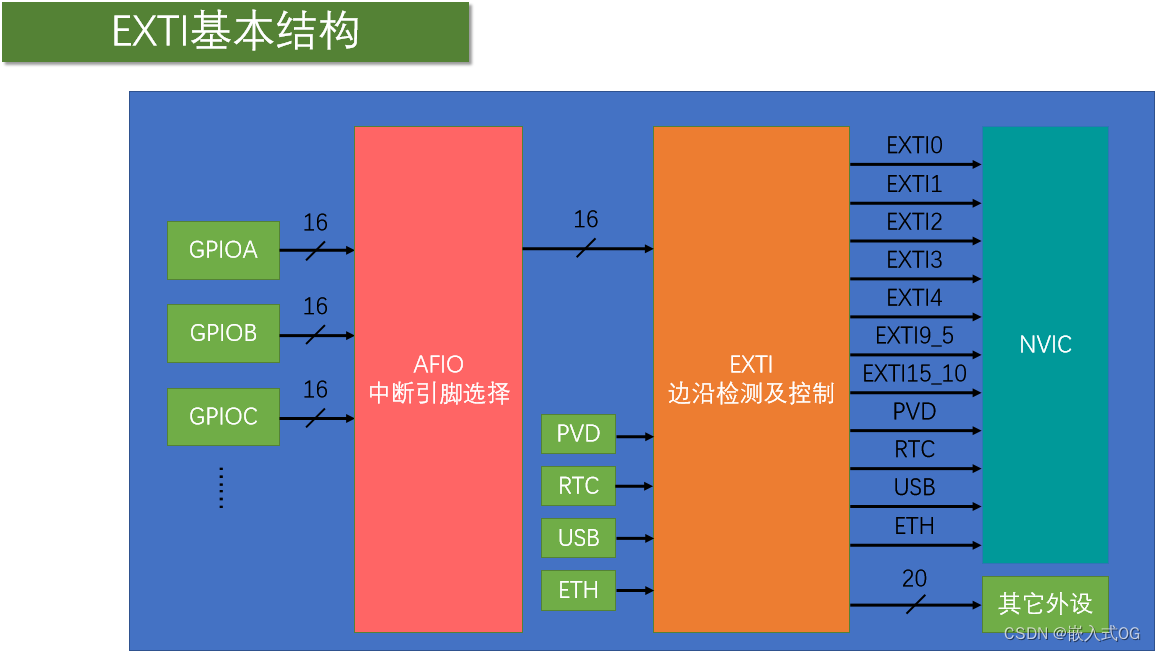
下图是EXTI的基本结构
 Alternate Fuction I/O:数据选择器(交替作用)
Alternate Fuction I/O:数据选择器(交替作用)
记形状:梯形(多个输入一个输出)
- 最左侧:GPIO口的外设,每个外设都有16个引脚。
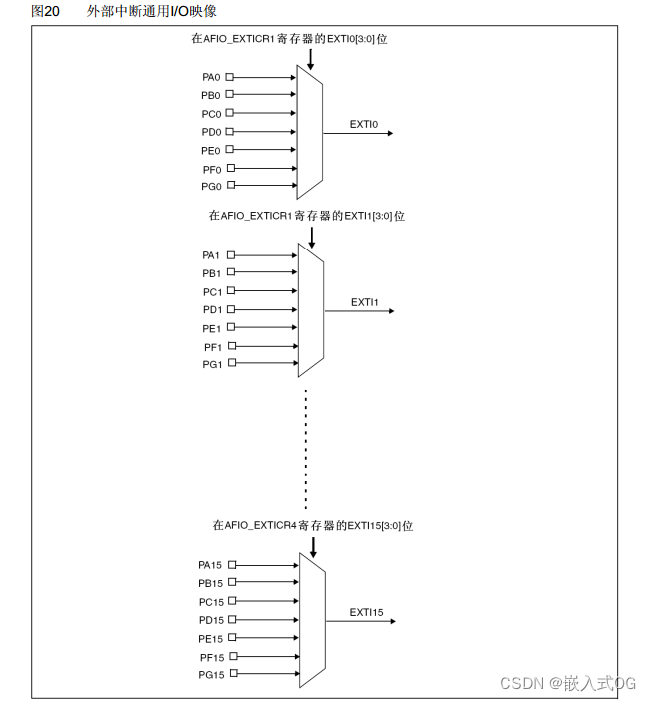
- AFIO中断引脚选择:本质上就是数据选择器,从前面16*n 个引脚中选择16根端口号不重复的引脚出来,连接到后面的EXTI通道中。在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择。下面是中断引脚选择的AFIO示意图:
- PVD、RTC、USB、ETH:四个特殊功能的外设。
- EXTI 边沿检测及控制:20个输入通道、两类输出。一类输出到NVIC中,并且将这20路输出的9、10 路外部中断合并在一起以节省通道;另一类输出到其他外设,直接就是20路输出。
注:上面这个EXTI的基本结构也是编写代码时的主要参考图!
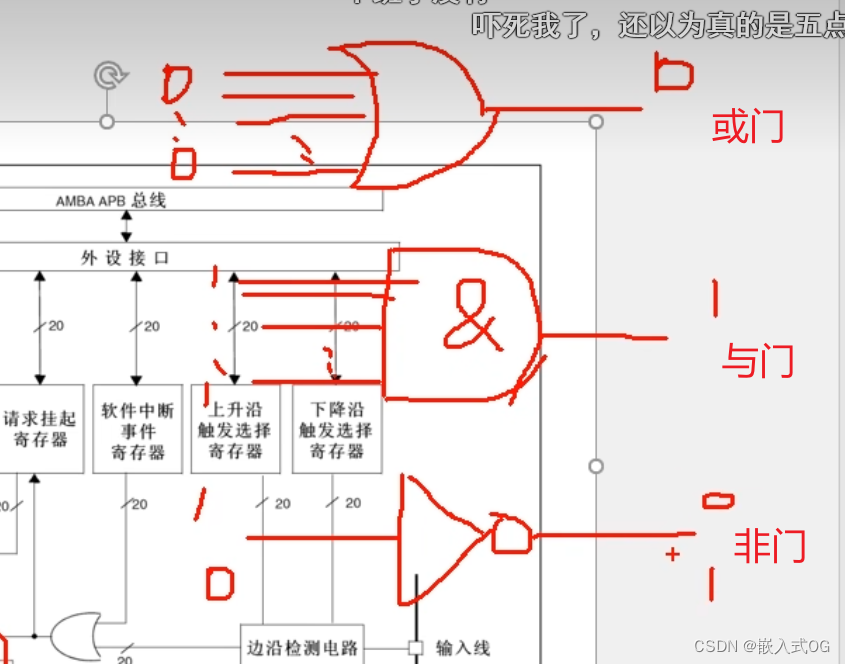
下图是EXTI 框图(方向为从左到右)-stm32F10系列参考手册
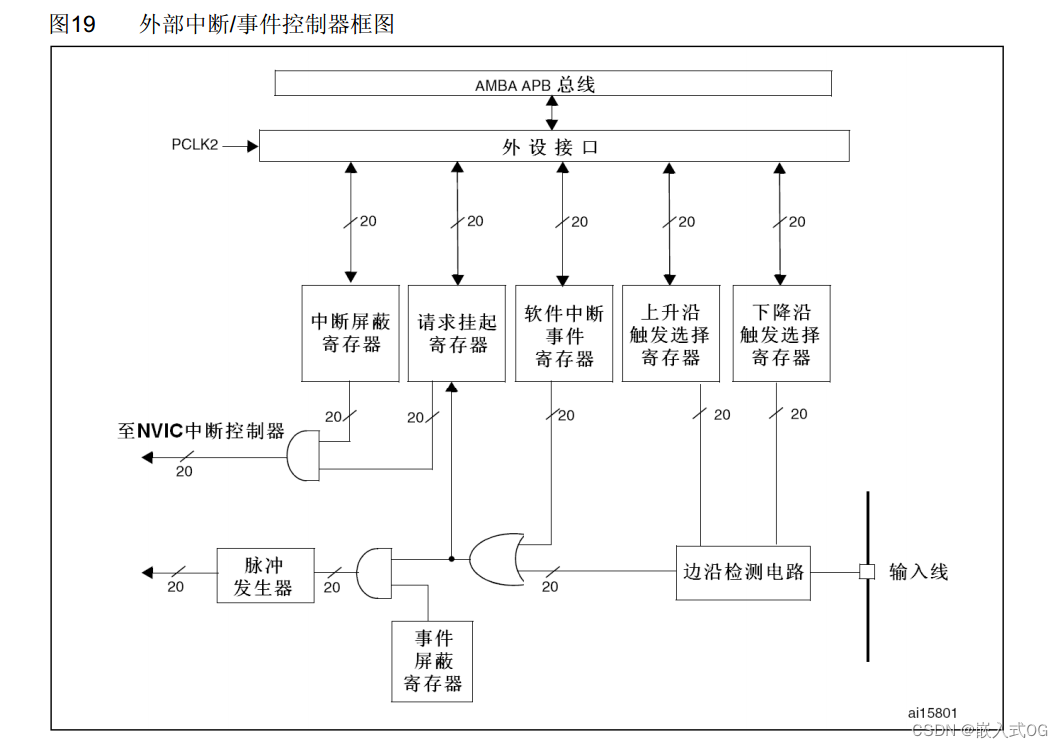
上图给出了参考手册中的EXTI框图。基本逻辑与“EXTI的基本结构”中所述相同,另外还有一些细节:
- 边沿检测电路+软件中断事件寄存器:这个几个进行或门输出,便可以实现“上升沿/下降沿/双边沿/软件触发”这四种触发方式。
- 请求挂起寄存器:相当于一个中断标志位,通过读取该寄存器可以判断是哪个通道触发的中断。
- 中断屏蔽寄存器/事件屏蔽寄存器:相当于开关,只有置1,中断信号才能继续向左走。
- 脉冲发生器:产生一个电平脉冲,用于触发其他外设工作。
最后一个问题,到底什么样的设备需要用到外部中段呢?
答:对于stm32来说,若想获取一个由外部驱动的很快的突发信号,就需要外部中断。
如旋转编码器,平常不会有什么变化,但是一旦拧动时,会产生一段时间变化很快的突发信号,就需要stm32能在短时间内快速读取并处理掉这个数据。
再如红外遥控接收头,平常也不会有什么变化,但是一旦接收到信号时,这个信号也是转瞬即逝的。
但是不推荐按键使用外部中断。因为外部中断不能很好的处理按键抖动和松手检测的问题,所以要求不高时,还是建议在主函数内部循环读取。
1.2 旋转编码器介绍
对射式红外传感器就是一种通用传感器模块,已经在第三节“GPIO通用输入输出口”中介绍过,不再赘述。本实验只介绍旋转编码器。
旋转编码器是一种用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向。

如上图,旋转编码器主要有三种类型:光栅式/机械触点式/霍尔传感器式。下面是这三种形式的介绍:
- 光栅式(老款鼠标):配合对射式红外传感器使用,在旋转过程中光栅式编码盘会不断地阻挡/透过红外射线,于是模块便会输出高低电平交替的方波,方波的频率便代表了旋转速度。缺点是只有一路输出,无法判断转动方向。
- 机械触点式:内部使用机械触点检测通断,A口和B口输出的方波正交,具体看下面的介绍。当然,也有机械触点式编码器可以一个引脚输出速度信息,一一个引脚输出旋转方向信息。
- 霍尔传感器式:直接附在电机后面的编码器,中间是一个圆形磁铁,旋转时两侧的霍尔传感器便可输出正交的方波信号。
- 独立的编码器元件:输入轴转动时,输出便有波形。
注:触点式不适合高速旋转的场景,常用于音量调节。非接触式形式的电机可以用于电机测速。
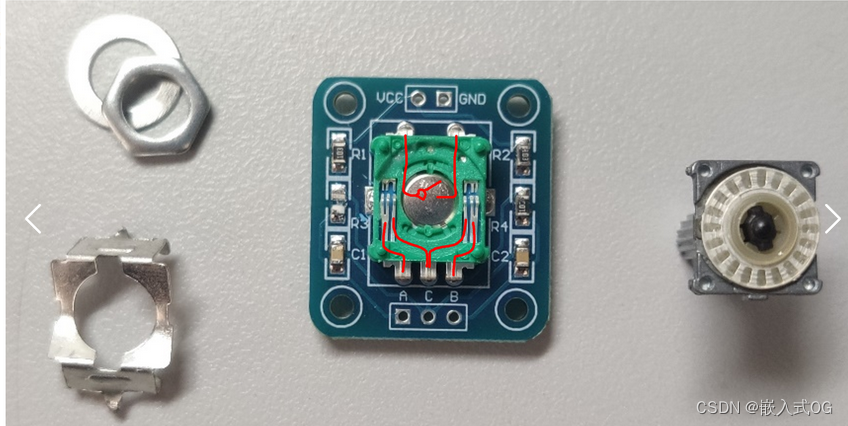
上图是机械触点式旋转编码器-实物拆解
- 图片右侧是旋转编码器的旋钮,可以看到下面是一圈可以导电的金属片。
- 中间有一个大的按键开关结构,也可以检测通断,但是该旋转编码器模块没有使用到该功能。
- 左右两组金属触点。内部实际的连接如红线标注,C口接地,于是旋钮在旋转过程中就可以使A口、B口输出高低交替的方波。方波频率表示旋转速度。
- A口、B口配合旋钮,可以产生相位相差90°的方波,称为正交信号。顺时针旋转A口相位超前,逆时针旋转B口相位超前。
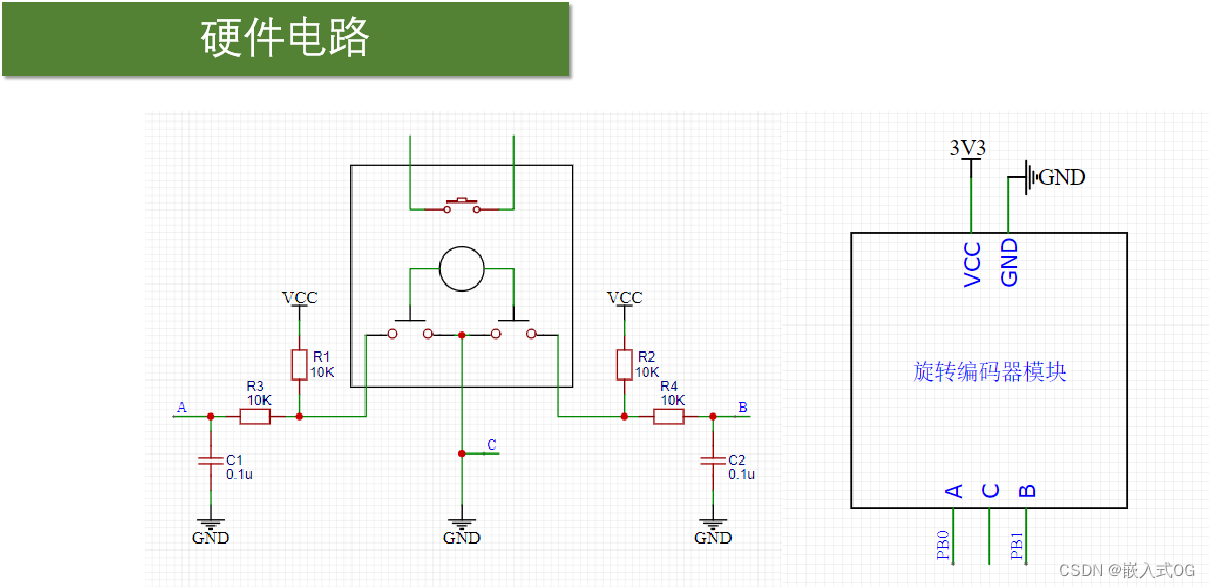
- R1、R2:上拉电阻。
- R3、R4:输出限流电阻,防止引脚电流过大。
- C1、C2:滤波电容,滤除高频不稳定纹波。
注:C口已经默认接地,只需关心A口、B口的高低变化及相位差即可。
1.3 实验:对射式红外传感器计次
需求:利用stm32的外部中断,对 对射式红外传感器 产生的下降沿进行计次。
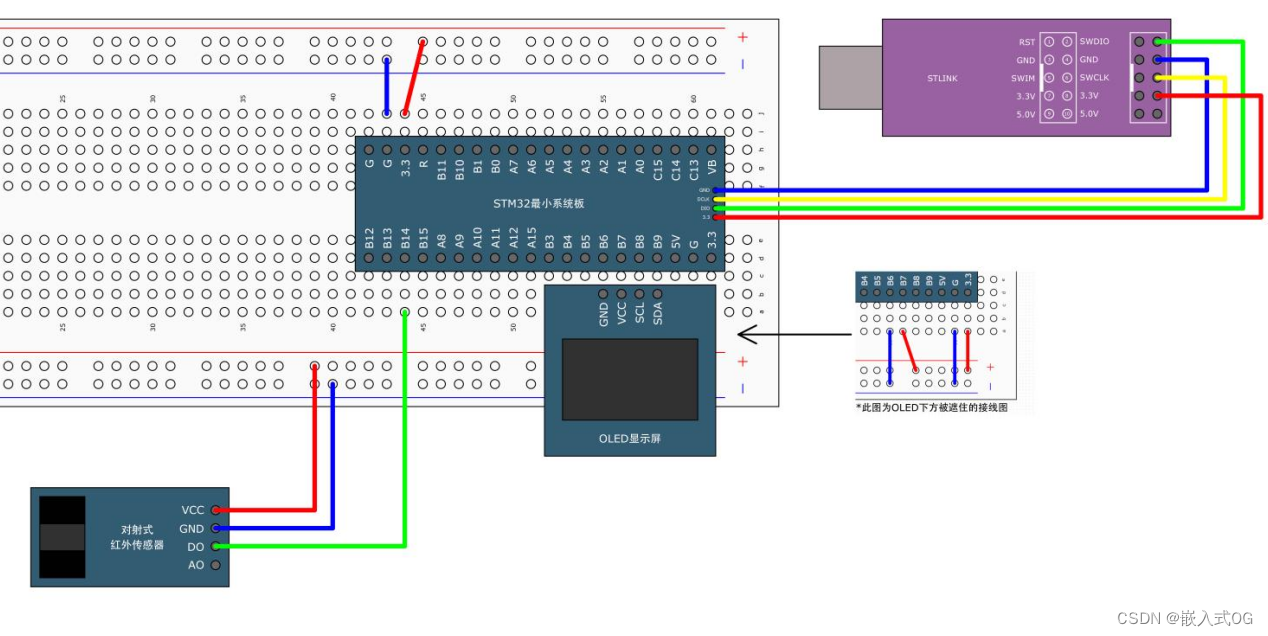 上图是对射式红外传感器计次-接线图
上图是对射式红外传感器计次-接线图
下图是对射式红外传感器计次-代码调用
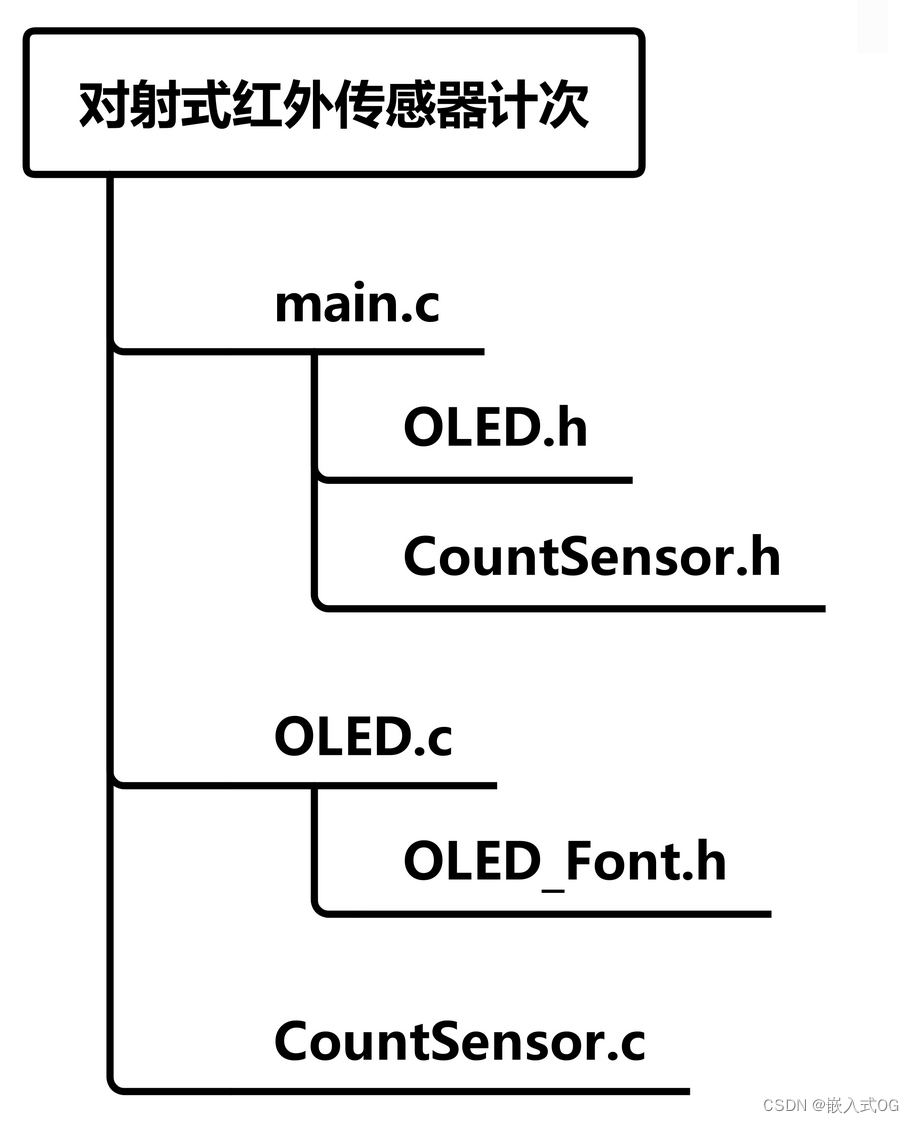 代码展示:OLED.h、OLED.c、OLED_Font.h代码见第四节“OLED调试工具”,本节省略。
代码展示:OLED.h、OLED.c、OLED_Font.h代码见第四节“OLED调试工具”,本节省略。
文章在这《嵌入式-stm32-江科大-OLED调试工具》
main.c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"int main(void)
{//模块初始化OLED_Init(); //OLED初始化CountSensor_Init(); //计数传感器初始化//OLED显示,显示静态字符串OLED_ShowString(1,1,"Count:"); //一行一列显示字符串Delay_ms(500);while(1){OLED_ShowNum(2,1,CountSensor_Get(),5);}}CountSensor.h
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_Hvoid CountSensor_Init(void);
uint16_t CountSensor_Get(void);#endifCountSensor.c
#include "stm32f10x.h"uint16_t CountSensor_Count; //全局变量,中断触发次数,用于计数
//默认初始化为0/*** 函 数:对射式红外传感器-计数传感器初始化 PB14* 参 数:无* 返 回 值:无*/
void CountSensor_Init(void)
{//1.开启时钟//2.GPIO初始化//3.AFIO选择中断引脚//4.EXTI初始化//5.//NVIC配置,NVIC中断分组//EXTI初始化//1.开启GPIO&AFIO的外设时钟(EXTI和NVIC的时钟是一直打开的)RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//2.配置GPIO—PB14上拉输入GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPU; //上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);//3.配置AFIO(库函数在GPIO中)中断引脚选择GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//将外部中断的14号线映射到GPIOB,即选择PB14为外部中断引脚//4.配置EXTI初始化EXTI_InitTypeDef EXTI_InitStructure;//改名字EXTI_InitStructure.EXTI_Line = EXTI_Line14;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发EXTI_Init(&EXTI_InitStructure);//5.NVIC配置(库函数在misc.h文件中,杂项)//配置NVIC中断分组NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置中断的优先级分组,每个工程只能出现一次NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);
}
/*** 函 数:获取计数传感器的计数值,输出中断触发的次数* 参 数:无* 返 回 值:计数值,范围:0~65535*/
uint16_t CountSensor_Get(void)
{return CountSensor_Count;
} /*** 函 数:EXTI15_10外部中断函数* 参 数:无* 返 回 值:无* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行* 函数名为预留的指定名称,可以从启动文件复制* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入*/
void EXTI15_10_IRQHandler(void)
{//中断标志位判断if(EXTI_GetITStatus(EXTI_Line14) == SET) //判断是否是外部中断14号线触发的中断{//如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14) == 0 ){CountSensor_Count ++; //计数值自增一次}EXTI_ClearITPendingBit(EXTI_Line4);//清除外部中断14号线的中断标志位//中断标志位必须清除//否则中断将连续不断地触发,导致主程序卡死}
}1.31 编程感想
对射式传感器采用下降沿触发(移除遮挡触发,硬件设计)。
传感器无遮挡时,DO输出低电平;传感器有遮挡时,DO输出高电平。所以放入遮挡物意味着触发上升沿,移除遮挡相当于下降沿。采用上升沿触发计数可能不准确,下降沿触发计数准确(实测),若传感器采用上升沿触发那么结论和上面相反,移除遮挡物的时候比较准确。中断函数的名字从启动文件“stratup_stm32f10x_md”中来,并且中断函数都是无参无返回值的。
在CountSensor.c里面GPIO使用结构体来初始化函数、外部中断、ADC、串口都是一样的操作。
学会使用keil调试,博主第一次烧录程序发现计数传感器没有返回值,灯会闪计数,但是不会反馈到显示屏上。于是我先把老师的代码烧录运行成功,说明硬件没问题,就是自己代码问题,然后一直排除,通过用源码替换自己写的代码过程中,发现是上一个实验的OLED.c问题,CV工程师。
OLED.c(可以跳过)
#include "stm32f10x.h"
#include "OLED_Font.h"/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))/*引脚初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C开始* @param 无* @retval 无*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 无* @retval 无*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C发送一个字节* @param Byte 要发送的一个字节* @retval 无*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //额外的一个时钟,不处理应答信号OLED_W_SCL(0);
}/*** @brief OLED写命令* @param Command 要写入的命令* @retval 无*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x00); //写命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}/*** @brief OLED写数据* @param Data 要写入的数据* @retval 无*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x40); //写数据OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}/*** @brief OLED设置光标位置* @param Y 以左上角为原点,向下方向的坐标,范围:0~7* @param X 以左上角为原点,向右方向的坐标,范围:0~127* @retval 无*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //设置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}/*** @brief OLED清屏* @param 无* @retval 无*/
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}/*** @brief OLED显示一个字符* @param Line 行位置,范围:1~4* @param Column 列位置,范围:1~16* @param Char 要显示的一个字符,范围:ASCII可见字符* @retval 无*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容}
}/*** @brief OLED显示字符串* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串,范围:ASCII可见字符* @retval 无*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函数* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}/*** @brief OLED显示数字(十进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~4294967295* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十进制,带符号数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-2147483648~2147483647* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十六进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFFFFFF* @param Length 要显示数字的长度,范围:1~8* @retval 无*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}/*** @brief OLED显示数字(二进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}/*** @brief OLED初始化* @param 无* @retval 无*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上电延时{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //关闭显示OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //设置多路复用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //设置显示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //设置显示开始行OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //设置COM引脚硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //设置对比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //设置预充电周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //设置整个显示打开/关闭OLED_WriteCommand(0xA6); //设置正常/倒转显示OLED_WriteCommand(0x8D); //设置充电泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //开启显示OLED_Clear(); //OLED清屏
}1.4 实验:旋转编码器计次
需求:利用stm32的外部中断,对旋转编码器的转动进行计次,顺时针加、逆时针减,并显示在OLED显示屏上。
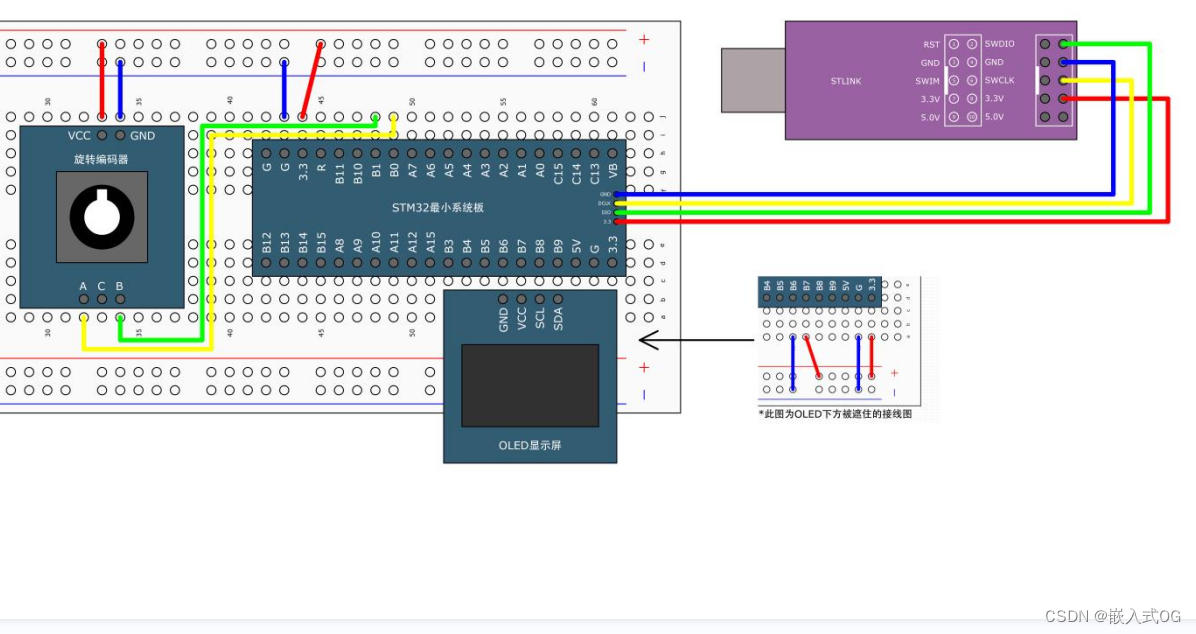 上图是旋转编码器计次的接线图,下图是代码调用(除库函数以外)
上图是旋转编码器计次的接线图,下图是代码调用(除库函数以外)
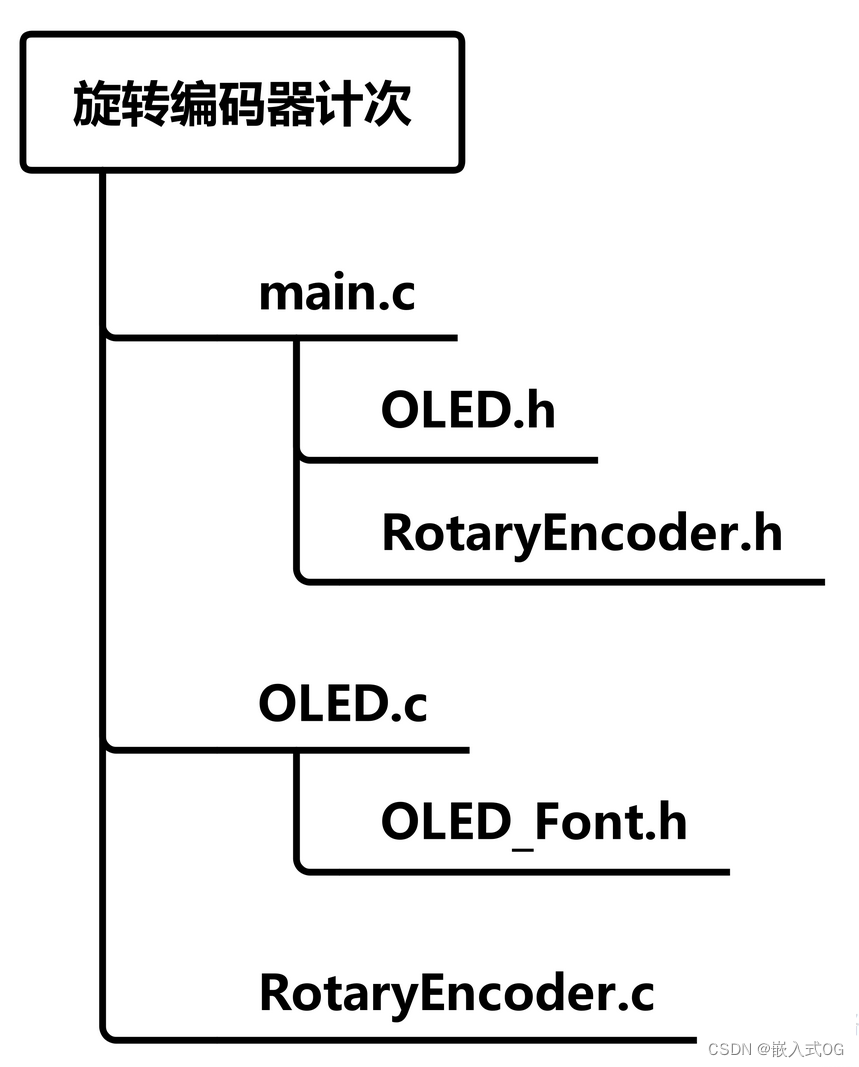
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
#include "Encoder.h"int16_t Num; //定义待被旋转编码器调节的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化CountSensor_Init(); //计数传感器初始化Encoder_Init(); //旋转编码器初始化/*显示静态字符串*/OLED_ShowString(1, 1, "Num:"); //1行1列显示字符串Count:OLED_ShowString(2, 1, "Num+=:"); //1行1列显示字符串Count:while (1){ Num += Encoder_Get();OLED_ShowSignedNum(1, 7, CountSensor_Get(), 5); //OLED不断刷新显示CountSensor_Get的返回值OLED_ShowSignedNum(2,8,Num,5); //显示Num}
}Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void);
int16_t Encoder_Get(void);#endifEncoder.c
#include "stm32f10x.h"int16_t Encoder_Count; //全局变量,用于计数旋转编码器的增量值void Encoder_Init(void)//旋转编码器初始化
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;//AB相分别接的是PB0和PB1GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB0和PB1引脚初始化为上拉输入/*AFIO选择中断引脚*/GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);//将外部中断的0号线映射到GPIOB,即选择PB0为外部中断引脚GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);//将外部中断的1号线映射到GPIOB,即选择PB1为外部中断引脚/*EXTI初始化*/EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; //选择配置外部中断的0号线和1号线EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //选择配置NVIC的EXTI0线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //选择配置NVIC的EXTI1线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //指定NVIC线路的响应优先级为2NVIC_Init(&NVIC_InitStructure); }//打算每次调用get函数之后,返回count的变化值,用于外部加减一个变量
int16_t Encoder_Get(void)
{//使用Temp变量作为中继,目的是返回Encoder_Count后将其清零,目的是给count清零//在这里,也可以直接返回Encoder_Count,直接返回就退出函数了没办法给count清零//下面这样子又能获取到count变化值,又能给count清零 //直接返回count会导致你扭一下,count就有一个值,Num就会一直变化了int16_t Temp;Temp = Encoder_Count;Encoder_Count= 0;return Temp;
}void EXTI0_IRQHandler(void)//A口下降沿中断函数
{if(EXTI_GetITStatus(EXTI_Line0) == SET){if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0) //PB1的下降沿触发中断,此时检测另一相,等于1正转,等于0反转{Encoder_Count --; //此方向定义为反转,计数变量自减}EXTI_ClearITPendingBit(EXTI_Line0); //清除标志中断0号线的中断标志位}}void EXTI1_IRQHandler(void)//B口下降沿中断函数
{if(EXTI_GetITStatus(EXTI_Line1) == SET){if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0) //PB1的下降沿触发中断,此时检测另一相{Encoder_Count ++; //此方向定义为正转,计数变量自增}EXTI_ClearITPendingBit(EXTI_Line1); //清除标志中断1号线的中断标志位}}
1.41 编程感想
- 管理Hardware文件夹。本次实验继承的是“OLED显示屏”实验的代码,而非“对射式红外传感器计次”。
- 注意每个模块在使用的时候都要进行初始化。
- 注意进入中断函数的时候要检查中断标志位,,退出的时候清零中断标志位。
- 注意主函数和中断函数不要操控同一个硬件,避免不必要的硬件冲突。中断函数一般执行简短快速的代码,如操作中断标志位等。
- 在中断函数内部不要执行长时间函数,中断是快速的突发事件,必须要短。
参考:B站STM32江协自动化&【哈工大虎慕】