一、集中式和分布式
集中式:由唯一的中央控制结点对整个系统进行控制。
分布式:对于多UCAV的分布式控制,基于合同网的市场竞拍机制是一种行之有效的方法。合同网的基本思想是将任务分配看作一个交易过程,通过“招标-投标-中标”这一市场拍卖机制实现任务的委派和迁移。当UCAV在作战过程中发现自己没有足够的能力处理某些任务,或执行任务的代价过大时,就把这些任务对外进行拍卖,由其他UCAV根据其能力和状态进行投标,然后主持拍卖的UCAV将任务迁移给能够以更低代价执行任务的UCAV。基于合同网的任务分配方法原理简单、易于实现、并且效率高效果好,已成为多UCAV分布式任务分配中应用最为广泛的方法。
有限中央控制下的分布式体系结构:任务控制站(地面)通过预先规划为每架UCAV提供一个初始任务计划,然后UCAV之间再根据环境和实时战况进行任务调整?
二、协商机制
在基于合同网的任务分配方法中,整个分配过程依赖于各求解结点的控制策略和自主决策,是一种分布式的自适应任务分配方法,其过程中包含协商机制。
协商机制?协商是分布式系统的重要规划方法与控制手段,是系统中自洽智能体通过交换相关的结构化信息形成一致观点,协调相互动作并解决矛盾和冲突以实现全局目标提高整体性能的过程。
多智能体协商通常应满足以下要求:1.行为自洽性:智能体根据自己当前的状态自主决定参与合作还是拒绝合作。2.协商快速性:协商过程应尽快完成,否则将可能失去协作的优势。3.计算简便性:计算复杂度应尽可能低且易于实现。4.协作有效性:达成的合作局面稳定,完成任务的效果优于独立完成。
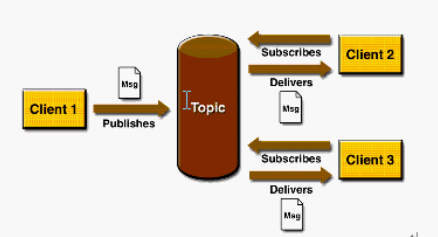
通信?通信是多UCAV协同作战需要重点考虑的因素。分布式控制系统中常用的通信模式包括“点对点模式,客户-服务器模式,公布-订购模式。公布-订购模式通信方式不是通过指定消息接收者进行通信,而是基于内容来进行通信。消息发出者发出的消息以表示任务和执行任务所需资源的主题词集表示,如利用雷达对任务点进行探测,利用某型号的导弹对目标进行攻击等,这样在通信过程中只需关注自身能力范围之内的任务信息。
三、合同网的基本思想
合同网作为一种面向谈判的任务分配和协作机制,通过模仿经济行为中“招标—投标—中标”机制实现任务的委派和迁移。
合同网采用任务拍卖的方式,将投标值作为之间任务分配的控制变量,通过的互相协商和任务竞争,在局部最优的基础上追求全局最优从而以最优的系统配置和代价完成任务。
合同网模型由多个可以互相传递信息的组成这些可分为三类:即招标者、投标者和中标者。
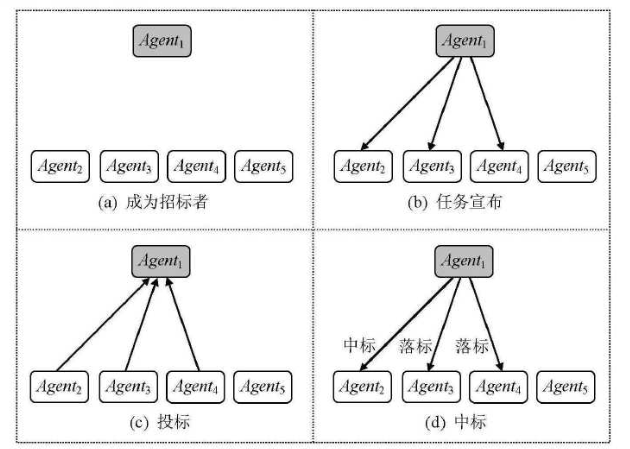
基于合同网的任务分配过程一般包括以下四个步骤:
1.任务宣布:当发现自己没有足够的能力处理当前的任务,或者当它通过任务分解产生新的任务时,就作为招标者把任务及求解约束向外界公布。
2.投标:其它收到招标信息后,根据任务要求和自己的能力、资源、兴趣,在有效时间内对收到的招标任务信息进行评估,选择最合适的任务进行投标,公布自己参与投标的价格。
3.中标:当收到所有的投标,或预定的投标截止时间到达后,招标者对投标进行处理,通过预定的标准挑选出最好的投标,向提出此投标的发出中标消息,并向其余投标失败的发出落标消息。
4.任务执行:收到中标消息的把被授予的任务加入到自己的任务队列中,在适当的时间执行该任务,并向招标者返回执行信息。
四、基于多种合同类型的任务分配
1.基于买卖合同的任务分配
买卖合同是合同网中最基本的合同类型,拍卖过程中个UCAV通过”买-卖“关系来实现任务的迁移。当UCAV在作战过程中发现自己没有足够的能力处理某些任务,或执行任务代价过高时,就把任务对外进行拍卖,由其它UCAV进行投标,然后主持拍卖的UCAV将任务卖给能够以更高效能执行任务的UCAV。

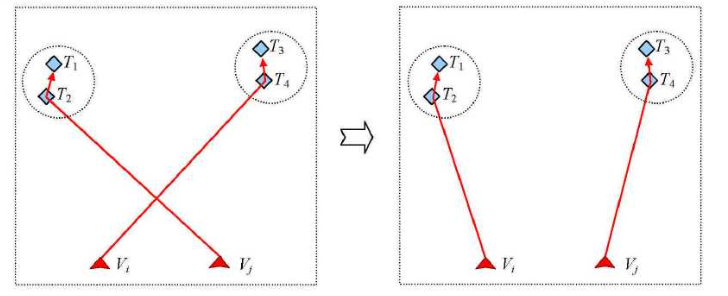
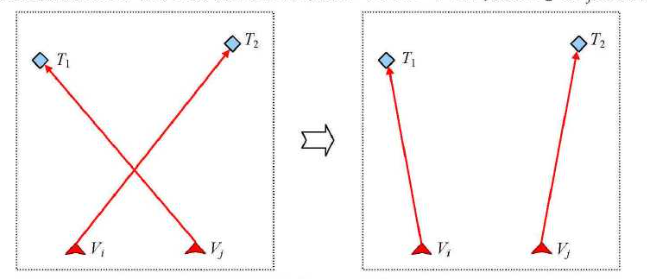
2.基于交换合同的任务分配
在买卖合同中,任务是由一架转移到另一架,仅依靠这一种合同方式在一些特殊情况下难以有效实现任务分配。但买卖合同算法中会考虑任务完成时间和任务负载,临时任何一方买入对方的任务都将使任务完成时间大大滞后,降低了系统整体效能而导致买卖合同不可能发生。因此,引入交换合同。
3.基于聚类合同的任务分配
在某些条件下,招标者和投标者需要对多个任务构成的任务集合进行拍卖和投标,任何单个任务的买卖或交换都将导致整体效能减小,而只有将两者之间的任务集进行一次性整体交换才能增加效能。因此,需要引入聚类合同,使招标者和投标者可以根据任务的空间、时间等属性的相似度对任务进行聚类,根据聚类结果进行组合拍卖,即在拍卖中一次性买卖、交换或者置换聚类在一起的多个任务。
本来是考虑这种方法就是把三台敌方无人机看作主动的一方,我方看作任务,但仔细考虑后发现不对,因为一开始并没有决定好我方无人机的编队,所以不能这样使用。