项目需求
项目框图
模块介绍
振动传感器

产生震动时,会输出低电平,绿色指示灯亮(开关信号指示灯)
继电器模块


(VCC =3.3V)当IN输入低电平时,ON 和 COM会导通,模块上的绿灯会亮
遥控收发 433M

发送端按下ABCD会在接收端被芯片调制解调,最终解析成不同的信号来识别,接收端的D0, D1, D2, D3 对应A,B,C,D,收到哪个对应的信号,相应的引脚就会给出高电平。
CubeMX配置
1.初始配置



2.震动传感器的DO口接到了PA4,所以将PA4配置成中断模式,且由于DO口拉低代表有震动,所以将模式改为下降沿触发
3.先只测试振动传感器模块
打开stm32f1xx_it.c -->EXTI4_IRQHandler(void)--> HAL_GPIO_EXTI_IRQHandler(vibrate_senior_Pin); --> HAL_GPIO_EXTI_Callback( )
HAL_GPIO_EXTI_Callback()就是中断处理程序,将他在main.c中重写:
其中weak是虚拟函数,重写的话会覆盖在此函数之上的

只测试振动传感器模块的
/*重写中断服务函数,如果检测到EXTI中断请求,则进入此函数*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
// 一根中断线上接多个中断源,判断中断源是否来自PA4if(GPIO_Pin == GPIO_PIN_4){if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4) == GPIO_PIN_RESET)// 如果坚持到PA4被拉低{//点亮LED1,否则关闭LED1HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);HAL_Delay(500);}else{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);}}}PS:如果直接在中断服务函数里调用 HAL_Delay ()函数,则会造成系统卡死。
原因:程序初始化时默认把滴答定时器的中断优先级设为最低,其它中断源很容易打断它导致卡死,也就是说当Delay函数在进行中的时候,如果又发生了震动触发了外部中断,就会又立刻执行这个中断处理程序,导致喇叭一直在响无法停下。
解决办法:
在 main 函数里使用以下函数提高滴答定时器的中断优先级(提升至0);
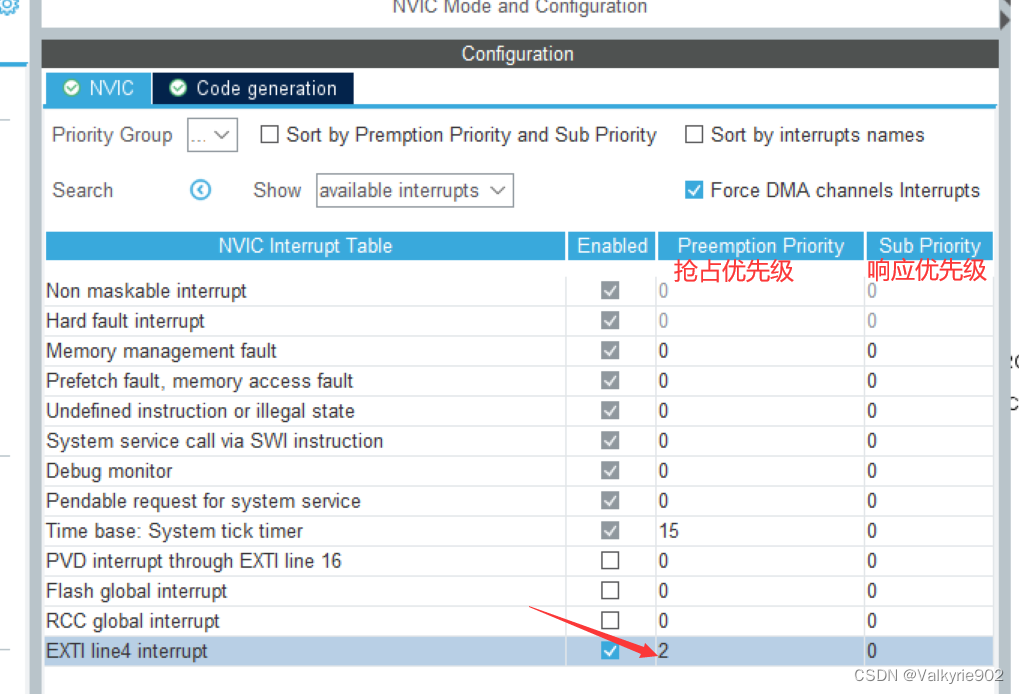
HAL_NVIC_SetPriority(SysTick_IRQn,0,0); //必须写在" SystemClock_Config() "后面!!!并且在CubeMX中将 EXTI4 的中断优先级设置比滴答定时器的中断优先级低,比如 2
然后可以在CubeMX重新生成代码(generate code),Keil中此时会自动弹出这个对话框问是否要重载,选择“是”:此时会将刚刚Cube中做出的修改反映到Keil中,并保留之前在Keil中自己写的代码!
加上继电器和遥控模块
#define state_ON 1
#define state_OFF 0/*重写中断服务函数,如果检测到EXTI中断请求,则进入此函数*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)//外部中断的处理函数,一根中断线上接多个中断源,判断中断源是否来自PA4,PA5,PA6
{static int status = state_OFF; //此处一定要加static,不然每次调用这个函数都会被赋值一遍/*switch(GPIO_Pin){case GPIO_PIN_4:if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4) == GPIO_PIN_RESET&& (status == state_ON))//如果检测到PA4被拉低{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//继电器打开}break;// 如果检测到PA5被拉高(按键A按下),设定为警报模式case GPIO_PIN_5:if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_5) == GPIO_PIN_SET){HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);//LED1亮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);//LED2灭HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);HAL_Delay(1000);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);status = state_ON;// 将标志位设置为ON}break;// 如果检测到PA6被拉高(按键B按下),设定为关闭警报模式case GPIO_PIN_6:if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6) == GPIO_PIN_SET){HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);//LED2亮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//LED1灭HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);HAL_Delay(1000);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);status = state_OFF;// 将标志位设置为OFF}break;}*/if((GPIO_Pin == GPIO_PIN_4) && (status == state_ON)) //如果检测到PA4被拉低,且模式为警戒模式,则将P6拉低,继电器打开,喇叭响;没有检测到则不响{if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4) == GPIO_PIN_RESET)//如果检测到PA4被拉低{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//继电器打开}}if(GPIO_Pin == GPIO_PIN_5)//D0,PA5被拉高(按键A按下),进入警戒模式,LED1亮、LED2灭{if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_5) == GPIO_PIN_SET){// 如果检测到PA5被拉高(按键A按下),设定为警报模式HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);//LED1亮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);//LED2灭HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);HAL_Delay(1000);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);status = state_ON;// 将标志位设置为ON}}if(GPIO_Pin == GPIO_PIN_6)//D1,对应按键B,按下解除警戒模式,LED2亮、LED1灭{if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6) == GPIO_PIN_SET){// 如果检测到PA6被拉高(按键B按下),设定为关闭警报模式HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);//LED2亮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//LED1灭HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);HAL_Delay(1000);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);status = state_OFF;// 将标志位设置为OFF}}




![[保姆级教程]Windows安装MongoDB教程](https://img-blog.csdnimg.cn/direct/9ca554922b7e41a4adac42a7a114af10.png)