0 简介
An integrated detection and location model for leakages in liquid pipelines
1 摘要
许多液体,如水和油,都是通过管道运输的,在管道中可能发生泄漏,造成能源浪费、环境污染和对人类健康的威胁。本文描述了一种集成的泄漏检测和定位模型,该模型可用于液体管道中的背景泄漏(现有技术手段和措施未能检测到的管网漏点的漏失量)甚至微泄漏。该模型包括动态监测模块(DMM)和静态测试模块(STM)。利用压力波的振幅传播和衰减模型,DMM可以检测到较大的背景泄漏。基于压力损失模型的STM可以检测微泄漏,是对DMM的有效补偿。为了验证所提出的模型,在实验室规模和现场进行了实验,并实施了现场应用。结果表明,该综合模型可以检测到几乎所有的泄漏。对于DMM,现场检测到的泄漏孔与管径的最小比值(RLOPD)为1/41.4,定位误差在1%左右。对于STM,现场检测到的最小泄漏率仅为0.0044%/h。因此,该模型可以检测和定位液体管道的泄漏。
2 引言
2.1 背景
管道在世界各地广泛用于运输和分配化学液体,如水和油。随着管道行业的快速发展(Fukushima et al ., 2000),由于腐蚀、第三方破坏等因素导致的管道泄漏事故频发,给管道的安全运行带来了很大的隐患(Nagaosa, 2014)。泄漏主要分为两种类型,即破裂和背景(Haghighi et al, 2012)。破裂是由于流量增加超过管道最大容量或由于管壁上的过大应力而立即发生的泄漏。背景泄漏随着时间的推移逐渐发生,通常是由腐蚀的进展或在恶化的情况下引起的。第二类更难探测,因为其形成过程缓慢且低压下降足够。相反,破裂瞬间发生,压力明显降低,这可以通过基于传感器的管道监测检测到。当我们试图检测和定位泄漏时,我们希望检测到背景泄漏,即使是较小的泄漏。
管道泄漏检测技术(Reddy et al ., 2011;Wang et al ., 2017;Morgan等人,2015)在保护管道运输安全方面发挥重要作用,并提供额外的环境,经济和人类健康效益。有很多方法(Sun and Chang, 2014;Mirzaei et al ., 2013)可用于检测和定位水和石油管道的泄漏,范围从视觉线行走检查,直接机械挖掘到复杂的基于模型的技术,例如基于质量/体积平衡,负压波,瞬态模型,分布式光纤和声波的方法。根据API 1130 (API 1130, 2002),泄漏检测系统(LDS)分为基于内部的LDS和基于外部的LDS。内部系统使用现场仪表(例如流量、压力或流体温度传感器)来监测内部管道参数。外部系统使用一套不同的现场仪器(例如红外辐射计或热像仪、蒸汽传感器、声学麦克风或光纤电缆)来监测外部管道参数。基于外部的方法被排除在计算管道监测(CPM)的讨论之外,因为它们不满足对现场参数进行计算以推断商品释放的要求。每种CPM方法,包括实时暂态方法,都有其优点和局限性。例如,一些CPM方法对测量可重复性和漂移更敏感,而其他方法可能需要大量的配置工作和调优。没有一种技术被证明适用于所有管道应用。可以采用多个CPM系统来提供一个CPM,该CPM可以更广泛地覆盖管道运行条件。迄今为止,大多数CPM技术尚未证明自己能够在定期或永久松弛线条件下提供令人满意的CPM操作。如果该条件存在于特定的管道中,则该管道的CPM选择标准将需要考虑操作条件。
目前,研究主要集中在由第三方损伤或压力波动引起的高泄漏率(LR)的破裂或背景泄漏(Zhang et al ., 2014)。这意味着,一般来说,只有当LR很高时,这些方法才能有效地检测到泄漏(Pregelj和Drab, 1997)。
背景泄漏检测是困难的,因为小的泄漏可能不会对现场仪表(如动态压力传感器)产生足够的变化,这意味着传感器无法测量压力变化。然而,在某些情况下,应检测到背景或较小的泄漏,甚至渗漏或滴水。对于机场管道,在API 1540 (API RP 1540, 2004)中,在参考压力为1000kpa时,应检测的最小泄漏率为0.04 L/(h·m3)或0.004%/h。泄漏检测应在一小时内完成。这意味着即使是渗漏或滴水也要在有限的时间内检测到,这就要求高灵敏度、短时间和高水平的检漏。此外,管道被埋在地下,这使得这些泄漏更难以检测到。
2.2 相关工作
为了对管道进行泄漏检测和定位,研究人员和工程师提出并改进了各种方法。
用于泄漏检测的实时瞬态方法(RTTM)使用质量、动量、能量和状态方程算法来确定流量。流量变量的预测值和实测值之间的差值用于确定管道中的泄漏。
该技术需要测量流量、压力和温度变量,并使用上述算法。RTTM持续分析噪声水平和正常瞬态事件,以最大限度地减少误报。泄漏阈值根据流量的统计变化进行调整。采用了一种基于实时瞬态模型的方法,可以检测到小泄漏(Scott and Barrufet, 2003),尽管这种方法非常昂贵,而且小泄漏仍然相对较大。不可压缩流体通过泄漏管道的瞬态数学模型已经建立(Molina-Espinosa et al ., 2013)。还进行了短管泄漏试验。将预测的压力分布与实验数据进行了比较,对泄漏流量大于公称流量的6%进行了很好的拟合。针对冷库氨管道开发了一种实时泄漏检测方法(Shen et al ., 2016)。在误报率相对较低(低至3%)的情况下,R22管道和氨管道的最小可检测泄漏率分别达到1%和4%。R22管路定位误差在−27% ~ 17%之间,氨管路定位误差在−27% ~ 27%之间。提出了一种基于瞬态模型的原油管道泄漏检测与定位技术(Chinwuko et al ., 2016)。该模型所涉及的压力、流量、温度等动态参数由SCADA (Supervisory Control and Data Acquisition)系统采集。该模型定位了一条长2000米、直径0.3556米的水平管道泄漏事件,该管道将尼日利亚bonny轻质原油从尼日利亚石油开发有限公司的Olomoro流站输送到UPS (Ughelli泵站)卡车线。然而,在管道泄漏修复工作中发现,模型定位的距离进口1088.12 m处的泄漏比实际发现的1100 m泄漏位置低11.88 m。为了改进RTTM,采用了多个CFM模型。已经提出了一种结合体积平衡的实时方法(Doorhy, 2011)来检测和定位小泄漏。它的高灵敏度甚至可以检测到非常小的泄漏,它可以准确地预测泄漏的位置,在零流量条件下工作,并且非常容易重复。已经提出了一种利用由下游截止阀突然关闭引发的瞬态负压波的技术(Elaoud等,2010)。管道中泄漏的存在部分反映在这些压力波中,从而可以定位泄漏。
提出了一种基于实时瞬态建模方法与负压波方法相结合的新型混合技术(Zhang et al ., 2015)。利用该技术,利用刺激-响应法定位泄漏点。结果表明,该混合技术在天然气管道泄漏检测和定位中取得了成功。然而,与测量的瞬态相比,在瞬态方法的情况下,正常瞬态模型远不能令人满意(Brunone et al, 1996;Verde等人,2007;Wylie et al, 1993)。这些差异的主要原因是在非定常摩擦中发现的,它具有二维或三维的影响,而大多数瞬态模型没有考虑到或没有适当考虑到这一点。在瞬态分析方法中,分配系统中摩擦因素的存在固有地降低了阀门关闭过程中传播的波压力的大小。所有管道系统的摩擦值取决于分配系统内流体速度的平方。
还提出了其他方法。提出了一种基于聚类和模糊系统相结合的管道泄漏检测方法。模糊系统最初使用包含模拟泄漏的修改数据集进行离线训练,并应用于小型液化石油气管道监测案例(da SilvaCelso et al, 2005)。已经描述了一种模型驱动的决策支持系统,该系统实现了基于模型的在线泄漏检测和定位方法(Meseguer等人,2014)。该决策支持系统适用于大型配水管网。结果表明,该方法可以有效地进行泄漏检测和定位,减少了所需的时间。还提出了一种移动无线传感器网络解决方案,该解决方案由移动传感器节点组成,可以随着管道内的水流自由移动,近乎实时地(通过传感器)收集和传输测量数据到静态接入点(称为信标)(Gong et al, 2016)。这项研究补充了移动传感器技术的巨大进步。已经提出了一种利用相控天线阵列进行水下管道被动泄漏检测的方法(Irina et al ., 2018)。提出了一种基于相控阵信号处理方法的检测系统,并给出了实验结果。
声学方法有其优点,得到了广泛的研究。建立了预测塑料水管泄漏声信号互相关函数的解析模型(Gao et al ., 2004),该模型可用于提高泄漏定位精度。在塑料水管中进行的实验(Hunaidi和Chu, 1999)表明,信号的幅值衰减速度为0.25 dB/m,频率低于50 Hz的信号的传播速度与频率无关,冬季声信号的传播速度比夏季快7%。建立了泄漏引起的信号在充液圆形管道中的传播模型,分析了泄漏引起的衰减特性,特别是声音和振动波的传播行为(Muggleton et al, 2002)。对充液管道中波的衰减特性进行了研究(Liu et al ., 2003),结果表明纵波在管道中的衰减速度比其他波慢。比较了波在不同管壁材料中的传播特性,得出了波在钢管中的衰减比在PVC管壁中的衰减慢的结论。
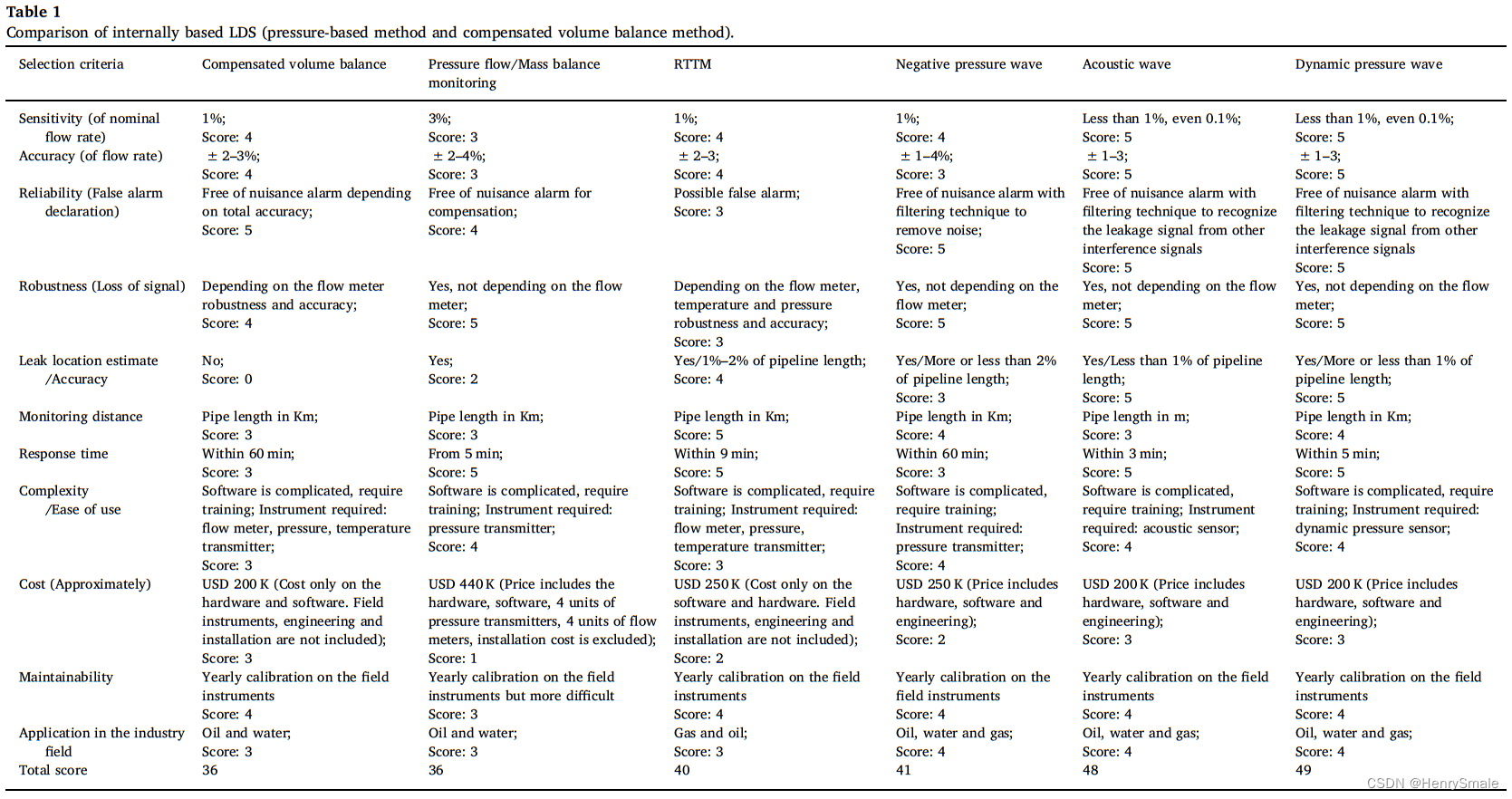
内部泄漏检测方法很多,尤其是基于压力值的检测方法。应与表1所示的基于补偿体积平衡的检测方法进行比较(Abdulshaheed et al, 2017)。
如表1所述,每种方法都有其优点和缺点。虽然监测距离较短,但基于声波的方法是有前途的。为了将声学方法应用于长距离管道,选择动态压力传感器来表示可长距离传播的大振幅,在此基础上提出了动态压力波,并对泄漏定位公式进行了修正。
目前,大多数声学方法的研究都是为了提高速度和时间差的计算精度。时差计算需要一个全球定位系统(GPS)时钟来标记数据,以保持测量信号的时间同步。这个问题之前也讨论过(Magnis和Petit, 2015)。这些数据应该仔细地用精确和同步的时钟(例如GPS或橄榄球时钟)进行时间标记,尽管这些时钟不容易获得,并且在许多地区容易受到干扰。不幸的是,这些建议与当前安装的系统中观察到的最佳技术状态相距甚远。在石油和天然气生产中,由于测量年代不精确而引起的问题已经得到了分析(Petit, 2015)。以上分析表明,时差计算是一个问题。基于这个观点,不使用速度和时间差的方法可以被认为更容易和更简洁。因此,提出了一种基于振幅的方法(Liu et al ., 2015a)。该方法不需要计算速度和时间差,为泄漏定位提供了一种新的方法。
然而,由腐蚀引起的泄漏通常是微泄漏。在发生重大损害之前,它们更难被发现。2013年,青岛发生溢油爆炸事故,造成约60人死亡,130多人受伤。雾直到几天后才消散。为什么会发生这种情况?因为在检测、定位和修复泄漏之前,已经积累了大量的油。更重要的是,在对中国石油管道进行调查后,每10公里的管道中就有5个微泄漏。大部分输油管道已使用20年以上,泄漏频率高。
在美国,这种风险和影响导致“加速修复、修复和更换风险最高的管道基础设施”。因此,微泄漏的检测具有重要的意义。
根据液体管道的现场操作经验,工程师们提出了几种检测微泄漏的方法(Roger, 2003;Bhuiyan等,2016;Sousal et al, 2013;Santos, 2013)基于压力步骤,压力和温度,压力梯度等。压力阶跃法的基础是,在给定泄漏尺寸的情况下,高压下的泄漏率大于低压下的泄漏率。然而,尽管精度很高,但理论和技术细节并不清楚。压力-阶跃法和压力-温度法考虑的是温度或热过程(Rajeev et al ., 2013;Ai et al, 2016)。压力梯度法的基础是假设压力沿管道的变化是线性的,这在传统的压力损失法中得到了体现。传统的压力损失法对微泄漏不敏感。
虽然微泄漏是危险的,但由于微泄漏率模型尚未明确建立,因此很少采用泄漏检测方法。
因此,一种能够逐滴检测微泄漏的方法是必要的,并且需要高灵敏度和高标准。检测时间要短。
总之,一个可以覆盖所有泄漏的集成模型是必要的。显然,模型应该包括两个模块:DMM和STM。这两个模块都是基于一种使用计算机的新方法。DMM采用基于幅度衰减模型的定位方法,对大泄漏敏感,可以实时检测管道。STM基于压力损失模型,该模型对微泄漏和持续泄漏敏感,可以定期使用。当使用前者时,不需要进行管道操作,而后者需要进行管道分割。
3 方法
3.1 基于幅度衰减的DMM模块传播模型
输油管道被认为是携带危险流体的管道,因此需要加强完整性。静水压试验(Edwards, 2014)是为了防止在正常工作条件下形成泄漏,满足工作的安全运行。试验一般在管道施工后或管道系统扩建前进行,也可在管道正常运行时进行。
静水压力试验(不流动的水),以加压水为介质,一般用于管道系统建成后的完整性检验。如果管道测试成功,则说明该管道不存在导致管道系统故障的缺陷。完成完整性测试后,在无泄漏情况下进行应用。然后进行泄漏孔最小的测试实验,首先设置一个阈值进行泄漏检测。在测试实验中,泄漏量是已知的,并应记录泄漏量。声波是在管道一端和另一端发生泄漏的地方测量的。通过小波变换得到子带幅值 p A 0 p_{A0} pA0和 p A p_A pA,将比值 p A p A 0 \frac{p_A}{p_{A0}} pA0pA设为阈值,将幅值较大的 p A 0 p_{A0} pA0作为参考压力。 p 1 p_1 p1和 p 2 p_2 p2两个测量信号,如果满足 p 1 p A 0 ≥ p A p A 0 \frac{p_1}{p_{A0}} \geq \frac{p_A}{p_{A0}} pA0p1≥pA0pA或 p 2 p A 0 ≥ p A p A 0 \frac{p_2}{p_{A0}} \geq \frac{p_A}{p_{A0}} pA0p2≥pA0pA,则有泄漏发生。
理论分析和实验研究表明,随着传播距离的增加,振幅衰减遵循指数曲线规律。振幅衰减可以用等式(1) (Liu et al., 2015b)来描述:
p = p 0 e − α x (1) p = p_0 e^{-\alpha x} \tag1 p=p0e−αx(1)
考虑介质的粘性吸收和热传导,可以得到阻尼吸收系数(DAC) α \alpha α (Liu et al ., 2015b):
α = 1 r c η ′ ω 2 ρ 0 + ω 2 2 ρ 0 c 0 3 ⋅ η ′ ′ + ω 2 2 ρ 0 c 0 3 ⋅ χ ( 1 C v − 1 C p ) (2) \alpha=\frac{1}{r c} \sqrt{\frac{\eta^{\prime} \omega}{2 \rho_{0}}}+\frac{\omega^{2}}{2 \rho_{0} c_{0}{ }^{3}} \cdot \eta^{\prime \prime}+\frac{\omega^{2}}{2 \rho_{0} c_{0}{ }^{3}} \cdot \chi\left(\frac{1}{C_{v}}-\frac{1}{C_{p}}\right) \tag2 α=rc12ρ0η′ω+2ρ0c03ω2⋅η′′+2ρ0c03ω2⋅χ(Cv1−Cp1)(2)
那么,将小波变换方法提取的幅度衰减量修改为:
p A = p A 0 e − σ α x (3) p_A = p_{A0} e^{-\sigma\alpha x} \tag3 pA=pA0e−σαx(3)
在式(3)中,通过对实验数据曲线的拟合,将理论DAC与拟合DAC进行对比分析,得出水、油管道的 σ \sigma σ为3 - 4。
然后提出了一种基于式(3)的新方法。通过以下公式(Liu et al ., 2015b)定位泄漏:
p 1 p 2 = e σ α ( L − 2 x ) ; x = L 2 − ln ( p 1 / p 2 ) 2 σ α \frac{p_{1}}{p_{2}}=e^{\sigma \alpha(L-2 x)} ; x=\frac{L}{2}-\frac{\ln \left(p_{1} / p_{2}\right)}{2 \sigma \alpha} p2p1=eσα(L−2x);x=2L−2σαln(p1/p2)
该方法简单、准确。虽然 α \alpha α的计算会导致误差,但 σ \sigma σ的计算使误差最小化。
所提出方法的详细过程如图1所示。
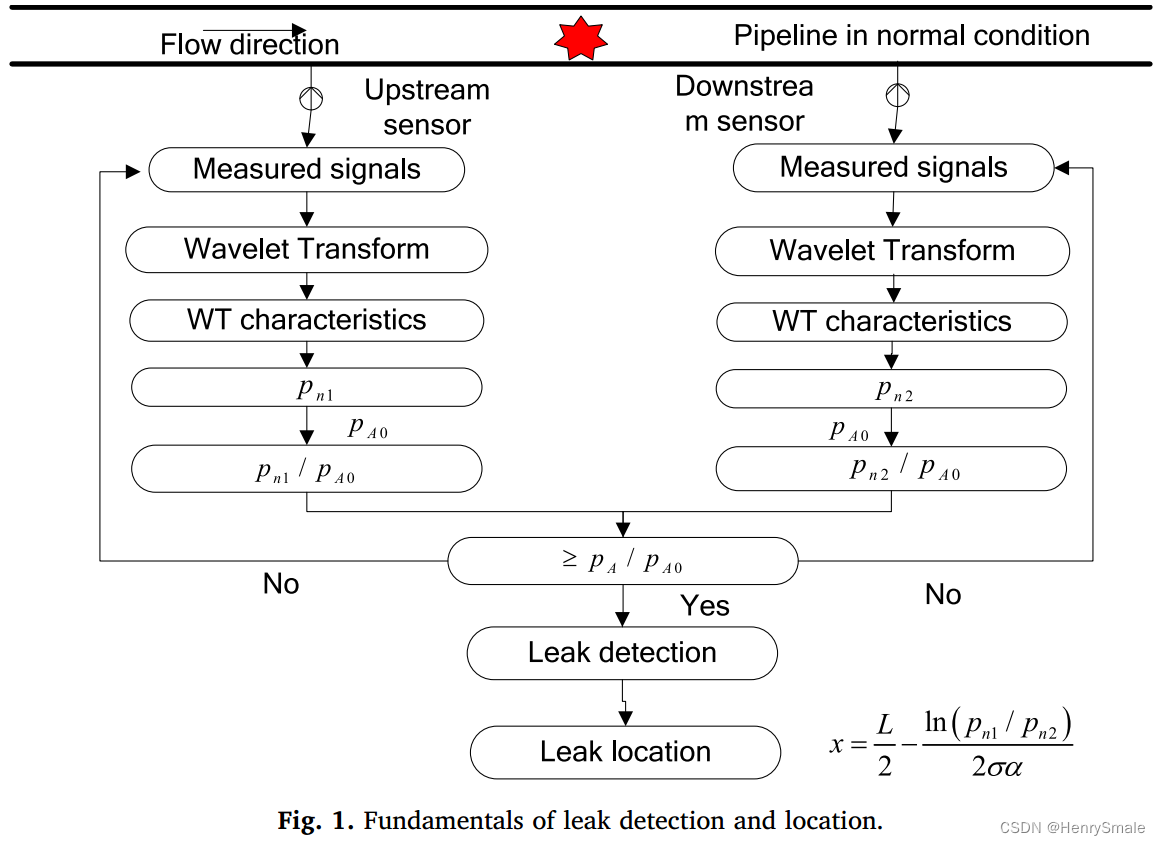
在研究活动中,不需要计算 α \alpha α和 σ \sigma σ。步骤如下:
- (1) 进行泄漏孔最小的第一次试验,得到阀值和参考压力;
- (2) 进行泄漏孔最小的第二次试验,管道中发生泄漏的一点与起始端之间的距离设为 x 0 x_0 x0;两个被测信号的子带幅值分别为 p 10 p_{10} p10和 p 20 p_{20} p20;
- (3)对管道进行监控,对信号进行测量。子带振幅为 p 1 n p_{1 n} p1n和 p 2 n p_{2n} p2n,如果 p 1 n p A 0 ≥ p A p A 0 \frac{p_{1n}}{p_{A0}} \geq \frac{p_A}{p_{A0}} pA0p1n≥pA0pA或者 p 2 n p A 0 ≥ p A p A 0 \frac{p_{2n}}{p_{A0}} \geq \frac{p_A}{p_{A0}} pA0p2n≥pA0pA,则有泄露发生;
- (4)根据式(3), ln ( p 10 p 20 ) / ( 2 σ α ) = L / 2 − x 0 \ln(\frac{p_{10}}{p_{20}}) / (2\sigma \alpha) = L/2 - x_0 ln(p20p10)/(2σα)=L/2−x0,则有:
L n / 2 − x n L 0 / 2 − x 0 = ln ( p 1 n / p 2 n ) ln ( p 10 / p 20 ) (5) \frac{L_n/2 - x_n}{L_0/2 - x_0} = \frac{\ln(p_{1n} / p_{2n})}{\ln(p_{10} / p_{20})} \tag5 L0/2−x0Ln/2−xn=ln(p10/p20)ln(p1n/p2n)(5)
由此可以计算出泄漏点 x n x_n xn。
使用不计算 α α α和 σ σ σ的步骤,表明该方法仍然可以有效地使用,是仅次于计算 α α α和 σ σ σ的方法的第二选择。
新的方法和改进的方法不考虑速度和时差,而只考虑振幅。





![你是不是MySQL老司机?来看看这些explain结果你能解释吗?[害羞]](https://img-blog.csdnimg.cn/direct/011db8347cc04f36bea2dc6a391ab71d.png)