三维重建 3D reconstruction
- 1. 相机几何
- 针孔相机
- 摄像机几何
- 2. 相机标定
- 线性方程组的解
- 齐次线性方程组的解
- 非线性方程组的最小二乘解
- 透镜相机标定
- 带畸变的相机标定
- 3. 单视图重建
- 2D平面上的变换
- 3D空间上的变换
- 单视测量
- 无穷远点 无穷远线 无穷远平面
- 影消点 影消线
- 单视重构
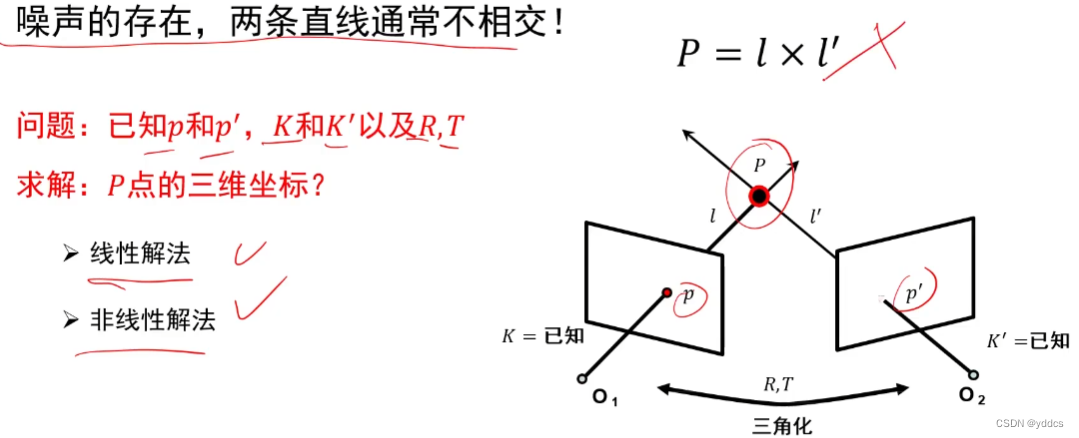
- 4. 三维重建与极几何
- 5. 双目立体视觉重建
- 6. 多视图重建
- 7. SFM 系统设计
- 8. SLAM系统设计
学习笔记第二部链接:https://blog.csdn.net/qq_35200351/article/details/136947058
课程链接: 北邮团队 https://cv-xueba.club/index.html
1. 相机几何
针孔相机

摄像机模型
对焦


三维到二维的映射关系
摄像机几何
焦距:相机的焦距 不是透镜的

坐标系转换:相机坐标系<=>像素坐标系
其他:图像坐标系
不是线性变换

齐次坐标
欧式空间(2d) 一 一对应齐次空间 (3d),反过来不是

转换为线性变换了

摄像机的投影矩阵

制造工艺造成摄像机偏移

相机坐标系下的相机模型
K有几个自由度,5DOF

再复习一遍:


2. 相机标定
线性方程组的解


齐次线性方程组的解


非线性方程组的最小二乘解

透镜相机标定
求解摄像机内参 外参数矩阵,描述了三维世界到二维像素的映射关系



m不是真实的投影矩阵,差一个放大系数



带畸变的相机标定

3. 单视图重建
2D平面上的变换




3D空间上的变换



单视测量
无穷远点 无穷远线 无穷远平面


2D平面上的无穷远点

2维平面中的无穷远线

3D空间中的面

3D空间中的无穷远平面

影消点 影消线



影消点 影消线 是一个确定的点 线


影消线与平面法向量


单视重构

4. 三维重建与极几何
5. 双目立体视觉重建
6. 多视图重建
7. SFM 系统设计
8. SLAM系统设计
第二部链接:https://blog.csdn.net/qq_35200351/article/details/136947058
课程链接 B站搜索:北邮教授鲁鹏15小时把计算机视觉3D三维重建讲的如此透彻