1.飞行任务规划
一般使用飞行任务规划软件进行飞行任务的设计,软件可以自动计算相机覆盖和图像重叠情况。比如ArduPilot (ArduPilot - Versatile, Trusted, Open) 和UgCS (http://www.ugcs.com)是两个飞行任务规划软件,可以适用大多数无人机系统。
2.图像重叠度
理想情况下,飞行路线至少有60%航向重叠和40%的旁向重叠。由于无人机平台上的GPS精度不高,我们建议航向和旁向80%重叠。如果是为了构建3D模型,我们强烈建议航向和旁向80%以上重叠。
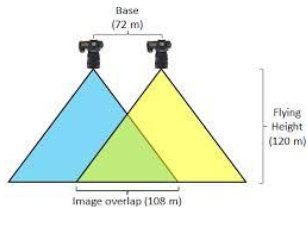
3.基高比(Base to height-B/H)对DSM/DTM的影响
基高比在1/2~1的立体图像可以获取高精度的3D地形数据,如下图所示,基高比是两个图像中心的距离"Base"和飞行高度"Height"之间的比值。
4.避免使用广角镜头
广角镜头拥有较宽的视场(FOV>90)会严重影响图像覆盖区域,而且图像边缘处"失真"比较严重,让图像像素不正确。因此我们建议使用小视场(FOV:60~80)镜头。
5.拍摄环境
(1)有云的天空
当云覆盖时拍摄图像,您可能会遇到不同的照明条件。需要正确设置相机参数ISO,确定设置中没有设置为"自动"的。为了增强效果,你可以使用一个校准目标(有明确的红,绿,蓝和白色区域)用于标定相机。
(2)太阳充足,高反射地表
如果拍摄区域有高反射地表以及太阳光充足会引起图像过渡曝光。我们建议使用ND滤镜,调整好ISO和提高快门速度。
6.图像分辨率GSD
飞行高度低可以得到较高的图像分辨率(ground pixel resolution-GSD),但是图像覆盖范围就小了。因此需要权衡GSD和图像覆盖范围。
GSD可以通过以下方式计算:
GSD =飞行高度 / (焦距 x CCD 像素尺寸)
焦距和CCD尺寸是相机的属性数据,可以在相机光谱文档中找到。
7.拍摄的图像在运动
理想情况下,应该拍摄静止的物体,以避免运动模糊。如果您看到模糊的图像,你应该尝试以下操作之一:
(1)增加相机的ISO设置和快门速度。
(2)降低无人机的飞行速度。
原文链接:https://bbs.csdn.net/forums/gisrs?spm=1001.2014.3001.6682
![【贪心]【字符串】【分类讨论】420 强密码检验器](https://img-blog.csdnimg.cn/f95ddae62a4e43a68295601c723f92fb.gif#pic_center)