旋转编码器是一种精密的@传感器装置,主要用于测量旋转物体的角度、速度、方向或位移等机械运动参数,并将其转换为相应的电脉冲信号或数字信号输出。这种装置广泛应用于工业自动化、机器人技术、伺服控制系统、电梯、电机控制、音视频设备、游戏控制器以及其他需要精确位置控制和速度反馈的各种机械设备中。
旋转编码器主要分为两种基本类型
增量式编码器:随着轴的旋转,它会产生一系列周期性的脉冲信号,脉冲的数量对应着旋转的角度。通过检测脉冲频率可以计算出转速,而通过比较A、B两路信号的相位关系(通常相差90度)可以确定旋转方向。
绝对式编码器:每一个特定的位置对应一个唯一的编码数值,即使在断电后重新上电,也能立即读取当前位置的绝对值,无需像增量式那样依赖连续计数来确定位置。
#旋转编码器#内部通常采用光电或磁电原理工作,例如光电式旋转编码器利用光栅盘和光电探测器,在旋转过程中产生明暗变化,进而生成电信号;磁电式旋转编码器则是利用磁场变化感应的方式得到信号。(本文素材来源:https://www.icdhs.com/news/597)
旋转编码器的作用
旋转编码器是一种传感器,主要用于测量和传递旋转轴或直线运动部件的角度、速度、方向和位置信息,并将这些机械运动参数转换为对应的电信号输出。它的主要作用体现在以下几个方面:
- 位置检测:旋转编码器能够精确测定机械部件如电机轴、阀门或任何旋转装置的转动角度和绝对位置,这对于需要精确位置控制的系统至关重要,如机器人手臂关节、数控机床、伺服系统等。
- 速度测量:通过检测单位时间内产生的脉冲数量,旋转编码器能够实时监控和计算出旋转体的速度,这对于速度闭环控制、电梯升降速度控制、车辆速度检测等应用非常重要。
- 方向识别:特别是在双通道(A/B相)或多通道编码器中,不同的脉冲通道之间有固定的相位关系,通过分析这些相位差可以准确判断旋转的方向(顺时针或逆时针)。
- 调速控制:与功率电子器件(如变频器)配合,旋转编码器可用于实现电机和其他驱动设备的快速精准调速,通过脉冲宽度调制(PWM)或其他控制策略,实现高效的转速调节。
- 闭环控制:在自动化控制系统中,旋转编码器作为反馈元件提供实时的运动状态数据,使控制系统可以根据设定值与实际值之间的偏差进行及时纠正,实现高精度的闭环控制。
- 故障安全与保护:在某些场合,例如电梯行业,旋转编码器还用于确保安全运行,例如在电梯超速情况下,编码器提供的信号可以触发紧急制动系统,防止危险情况发生。
旋转编码器是如何工作的
让我们仔细看看编码器以了解它的工作方式。它是一个细长的圆盘,具有等距的接触区域。它可以与同一个引脚连接,也可以使用两个单独的接触引脚 A 和 B 进行连接,如下图所示。
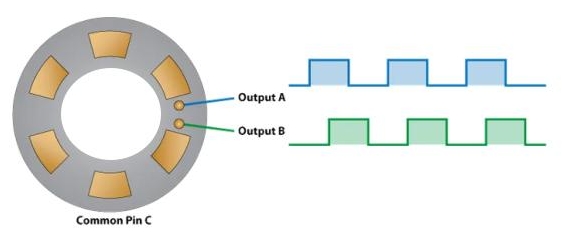
如果圆盘开始逐步转动,A、B 引脚开始相互接触,则根据情况产生两个方波输出信号。当我们简单地计算信号脉冲时,两个输出都可以用于确定旋转位置。如果我们还想确定旋转方向,我们可以同时分析两个信号。我们可以看到两个输出信号彼此间隔 90 度。如果编码器顺时针旋转,则输出 A 在输出 B 之前。
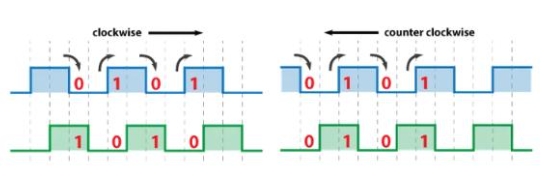
每次信号从低到高或从高到低变化时,我们都应该看一下步骤。此时我们可以看到,输出信号具有相反的值。反之,如果逆时针移动,则输出信号为逆时针。
举例说明:旋转编码器Arduino
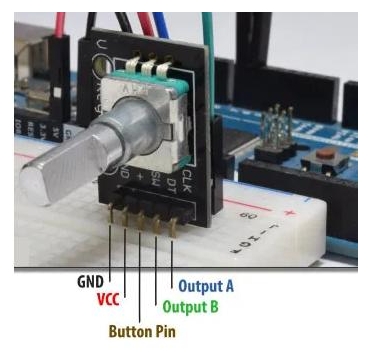
我们可以使用 Arduino 来对此进行实际说明。我在本次演示中使用的特定模块是分线板,其中包括五个引脚。第一个引脚代表输出,下一个引脚代表 B 输出,第三个引脚充当按钮引脚。另外两个引脚对应于 VCC 和 GND 引脚。
编码器接线方法
旋转编码器接线图可能是唯一的,并且应遵循指定的图表或引脚排列。具有换向轨道的多通道接线最多可以有 14 根电线。接线错误可能会导致信号问题,例如脉冲失真、信号幅度低和连接短路。下面是 旋转编码器接线图。
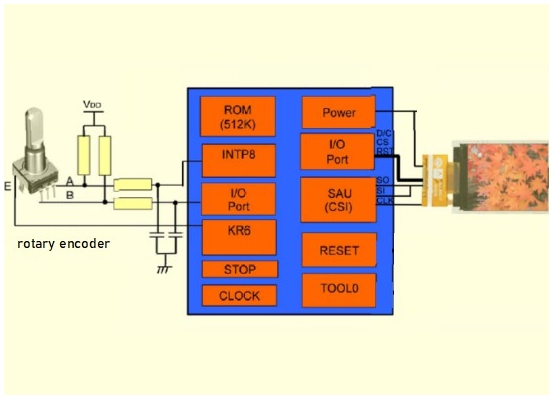
旋转编码器接线图
减少信号噪声
如果没有接线,光学编码器不能用作反馈设备。电线用作接收辐射信号的路线。电缆的长度影响效果。在电磁干扰较高的环境中,首先应考虑应用技术来防止噪声。接线应敷设在导管中,最好与其他电线分开。如果不可能,它们只能与其他低功率直流电缆一起运行。信号线应距电源线至少 1 英尺。
旋转编码器键盘
屏蔽意义重大。我们应该使用带有排扰线的箔护套或接地的编织线屏蔽层来保护电缆。对于非常敏感的应用或高电磁干扰环境,应使用金属箔护套线和电缆周围的整体编织线屏蔽。
接地编码器线
编码器外壳和电缆/连接器均不应接地。我们只能将电缆的一端接地。多点接地会产生接地环路,从而导致交流感应噪声。最好的方法是通过连接器接地,最好是在驱动器一侧,假设驱动器接地。
在工业环境中,电机、远程开关和磁场会产生高电流通量。当不同接地点的电位发生变化时,我们可以从仪器端的一点将电缆屏蔽层以及系统中所有其他需要接地的部分接地。
防止电机轴电流
变频驱动器在电机的轴、转子和外壳中感应电流。这是因为开关频率高。电流通过轴承,会损坏滚道中的滚珠。
我们需要将编码器与轴电隔离。这可以使用直接接触电机轴的接地电刷来完成。该轴又连接到电机框架,以便任何感应电流将直接流到电机框架。这样可以保护它和电机轴承。
编码器相位和反相
在旋转编码器中,相位和反相的概念主要涉及以下内容:
相位:
- 在增量式编码器中,常见的A相和B相会以90度的相位差输出脉冲信号。这意味着当编码器旋转时,A相和B相的脉冲序列会交错出现,形成一个正交的脉冲信号。通过检测A相和B相的相对时序,可以确定旋转的方向。例如,如果A相领先B相,则表示顺时针旋转;反之,若B相领先A相,则表示逆时针旋转。
反相:
- 相位反相:在编码器的使用中,“反相”可能指的是相位关系的翻转。比如原本A相超前B相90度,若发生了相位反相,则可能是B相反而超前A相90度。这可能会导致旋转方向判断错误,需要在电路设计或软件处理中正确配置或校正。
- 信号极性反相:另一种“反相”是指信号电平的翻转,例如,原本高电平代表有效信号,反相后则变为低电平代表有效信号。在连接编码器到接收设备时,如果信号极性接反,会导致设备无法正常解码编码器信号,此时需通过硬件或软件手段调整信号极性。
- 编码器安装方向错误导致的相位关系错误:如果编码器安装方向与预期不符,虽然物理上没有改变A、B相的电气相位,但实际观察到的旋转方向信息会与实际运动方向相反,这也可理解为一种“反相”,修正时需要重新安排编码器与运动轴的连接或在系统软件中调整逻辑。
@编码器的相位描述的是不同通道间信号的相对时间顺序,而反相问题通常是涉及到信号的实际电平变化方向或相对于预设方向的反向变化。在实际应用中,正确理解和处理这些概念对确保编码器输出的数据能够准确反映设备的实际运动状态至关重要。