目录
Floyd算法
例题:蓝桥公园
Dijkstra算法
例题:蓝桥王国
SPFA算法
例题:随机数据下的最短路问题
总结
最小生成树MST
Prim算法
Kruskal算法
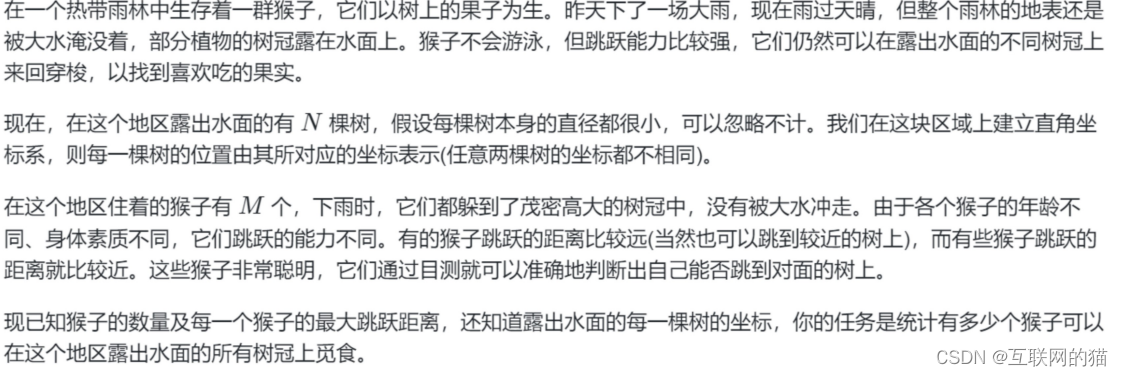
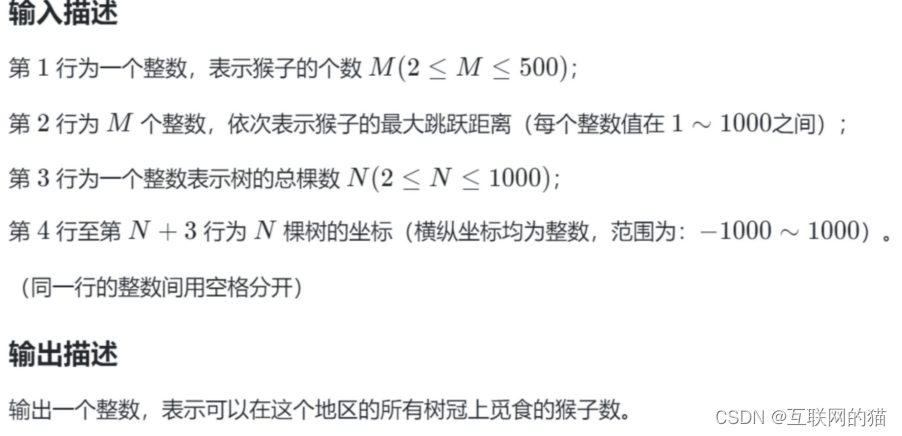
例题:聪明的猴子
Floyd算法
最简单的最短路径算法,使用邻接矩阵存图,因为Floyd算法计算的结果是所有点对之间的最短路,本身就要的空间,用矩阵存储最合适。效率不高,计算复杂度为
,只能用于n<300的小规模的图,不能用于大图,在某些场景下有自己的优势,难以替代,能做传递闭包问题。
for(int k=1;k<=n;k++){for(int i=1;i<=n;i++){for(int j=1;j<=n;j++){dp[i][j]=min(dp[i][j],d[i][k]+dp[k][j]);}}
} Floyd算法是多源最短路算法,以此计算能得到图中每一对结点之间(多对多)的最短路径。
Floyd算法能判断负圈,若图中有权值为负的边,某个经过这个负边的环路,所有边长相加的总长度也是负数,这就是负圈。在这个负圈上每绕一圈,总长度就更小,从而陷入在兜圈子的死循环。Floyd算法很容易判断负圈,只要在算法运行过程中出现任意一个dp[i][j]<0就说明有负圈,因为dp[i][j]是从i出发,经过其它中转点绕一圈回到自己的最短路径,如果等于0,就存在负圈。
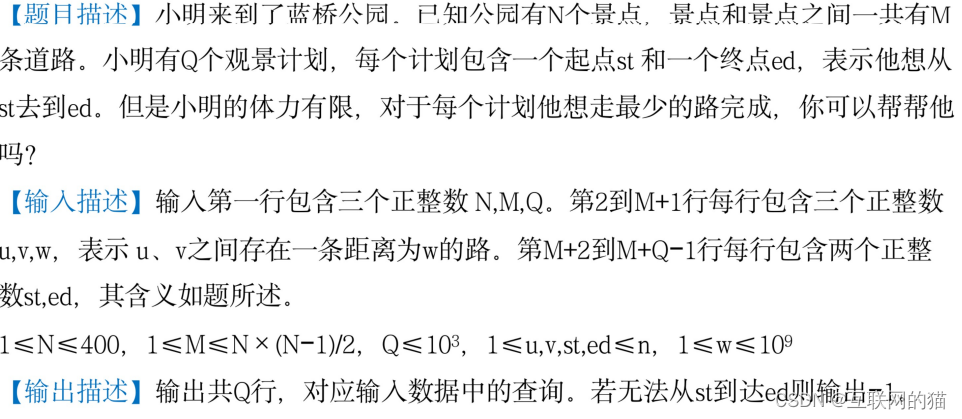
例题:蓝桥公园
#include<bits/stdc++.h>
using namespace std;
const long long INF=0x3f3f3f3f3f3f3f3fLL;
const int N=405;
long long dp[N][N];
int n,m,q;
void floyd(){for(int k=1;k<=n;k++){for(int i=1;i<=n;i++){for(int j=1;j<=n;j++){dp[i][j]=min(dp[i][j],dp[i][k]+dp[k][j]);}}}
}
int main(){cin>>n>>m>>q;memset(dp,0x3f,sizeof(dp));for(int i=1;i<=m;i++){int u,v;long long w;cin>>u>>v>>w;dp[u][v]=dp[v][u]=min(dp[u][v],w);}floyd();while(q--){int s,t;cin>>s>>t;if(dp[s][t]==INF){cout<<"-1"<<endl;}else if(s==t){cout<<"0"<<endl;}else{cout<<dp[s][t]<<endl;}}return 0;
}Dijkstra算法
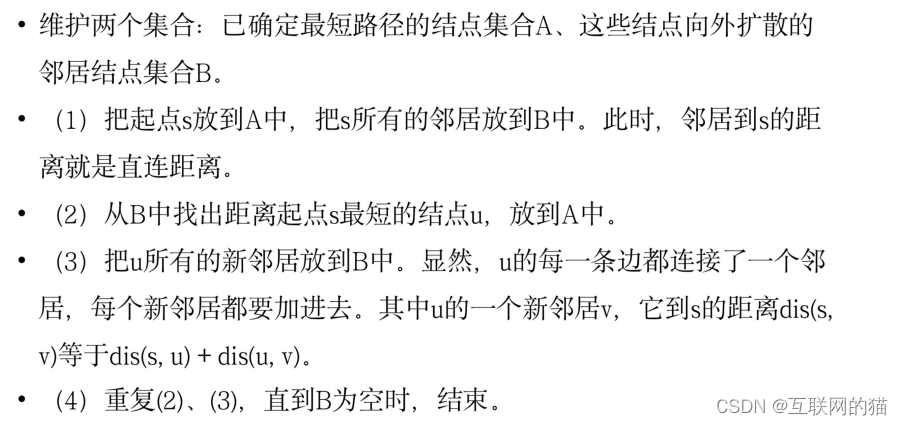
Dijkstra算法用于求解单源最短路径问题,非常高效而且稳定,但是只能处理不含负权边的图。
Dijkstra算法是贪心思想实现的,首先把起点到所有点的距离存下来找个最短的,然后松弛一次再找出最短的,所谓的松弛操作就是,遍历一遍看通过刚刚找到的距离最短的点作为中转站会不会更近,如果更近了就更新距离,这样把所有的点找遍之后就存下了起点到其它所有点的最短距离。
采用优先队列实现,每次往队列中放数据时,按从小到大的顺序放,采用小顶堆的方式,复杂度是,保证最小的数总在最前面。找最小值,直接取第一个数,复杂度是
。
例题:蓝桥王国
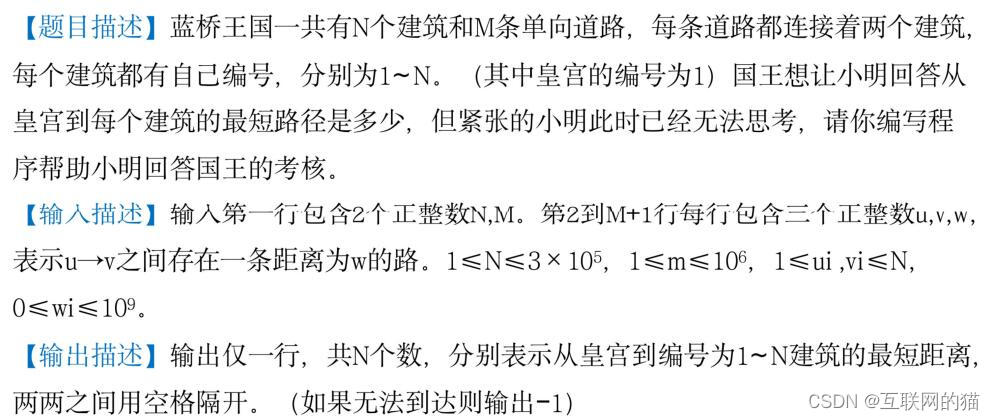
#include<bits/stdc++.h>
using namespace std;
const long long INF=0x3f3f3f3f3f3f3f3fLL;
const int N=3e5+2;
struct edge{int from,to;long long w;edge(int a,int b,long long c){from=a;to=b;w=c;}
};
vector<edge>e[N];
struct s_node{int id;long long n_dis;s_node(int b,long long c){id=b;n_dis=c;}bool operator < (const s_node &a) const{ return n_dis>a.n_dis;}
};
int n,m;
long long dis[N];
void dijkstra(){int s=1;bool done[N];for(int i=1;i<=n;i++){dis[i]=INF;done[i]=false;}dis[s]=0;priority_queue<s_node>Q;Q.push(s_node(s,dis[s]));while(!Q.empty()){s_node u=Q.top();Q.pop();if(done[u.id]){continue;}done[u.id]=true;for(int i=0;i<e[u.id].size();i++){edge y=e[u.id][i];if(done[y.to]){continue;}if(dis[y.to]>y.w+u.n_dis){dis[y.to]=y.w+u.n_dis;Q.push(s_node(y.to,dis[y.to]));}}}
}
int main(){cin>>n>>m;for(int i=1;i<=n;i++){e[i].clear();}while(m--){int u,v,w;cin>>u>>v>>w;e[u].push_back(edge(u,v,w));}dijkstra();for(int i=1;i<=n;i++){if(dis[i]>=INF){cout<<"-1";}else{cout<<dis[i];}}return 0;
}SPFA算法
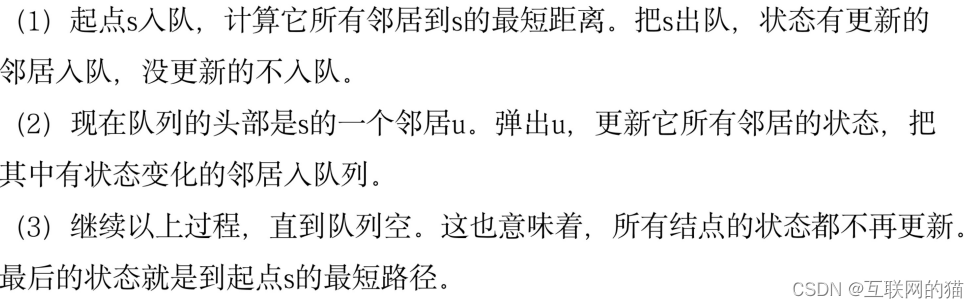
SPFA算法=队列处理+Bellman-Ford
Bellman-Ford算法有很多低效或无效的操作,其核心内容,是在每一轮操作中,更新所有节点到起点s的最短距离。
计算和调整一个节点u到s的最短距离后,如果紧接着调整u的邻居节点,这些邻居肯定有新的计算结果,而如果漫无目的的计算不与u相邻的节点,这可能毫无变化,所以这些操作是低效的。
改进:计算结点u之后,下一步只计算和调整它的邻居,能加速收敛的过程。这些步骤用队列操作
例题:随机数据下的最短路问题
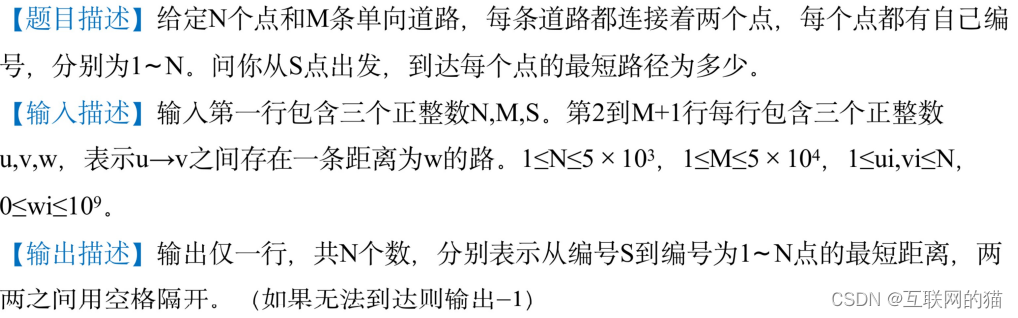
#include<bits/stdc++.h>
using namespace std;
const long long INF=0x3f3f3f3f3f3f3f3f;
const int N=5e3+10;
struct edge{int to;long long w;edge(int tt,long long ww){to=tt;w=ww;}
};
long long dist[N];
int inq[N];
vector<edge>e[N];
void spfa(int s){memset(dist,0x3f,sizeof(dist));dist[s]=0;queue<int>q;q.push(s);inq[s]=1;while(!q.empty()){int u=q.front();q.pop();inq[u]=0;if(dist[u]==INF){continue;}for(int i=0;i<e[u].size();i++){int v=e[u][i].to;long long w=e[u][i].w;if(dist[v]>dist[u]+w){dist[v]=dist[u]+w;if(!inq[v]){q.push(v);inq[v]=1;}}}}
}
int main(){int n,m,s;cin>>n>>m>>s;for(int i=1;i<=m;i++){int u,v;long long w;cin>>u>>v>>w;e[u].push_back(edge(v,w));}spfa(s);for(int i=1;i<=n;i++){if(dist[i]==INF){cout<<-1;}else{cout<<dist[i];}if(i!=n){cout<<" ";}else{cout<<endl;}}return 0;
}总结
单源最短路
(1)当权值非负时,用Dijkstra算法。
(2)当权值有负值,且没有负圈,则用SPFA。SPFA能检测负圈,但是不能输出负圈。
(3)当权值有负值而且有负圈需要输出,则用Bellman-Ford,能够检测并输出负圈。
多源最短路
使用Floyd算法。
最小生成树MST
一个含有n个结点的连通图的生成树是原图的极小连通子图,包含原图中的所有n个结点,并且边的权值之和最小。
Prim算法
对点进行贪心操作,从任意一个点u开始,把距离它最近的点加入到MST中,下一步,把距离{u,v}最近的点w加入到MST中;继续这个过程,直到所有的点都在MST中。适用于稠密图。
#include<bits/stdc++.h>
using namespace std;
const int INF=0x3f3f3f3f3f3f3f3f;
const int MAXN=1005;
vector<int>demo;
int closest[MAXN],lowcost[MAXN],n,m;//m为节点的个数,n为边的数量
int G[MAXN][MAXN];//邻接矩阵
int prim(){for(int i=0;i<n;i++){lowcost[i]=INF;}for(int i=0;i<m;i++){closest[i]=0;}closest[0]=-1;//加入第一个点,-1表示该点在集合U中,否则在集合V中int num=0,ans=0,e=0;while(num<m-1){//当点还没有全部放进去 int micost=INF;for(int i=0;i<m;i++){if(closest[i]!=-1){int temp=G[e][i];if(temp<lowcost[i]){lowcost[i]=temp;closest[i]=e;}if(lowcost[i]<micost){micost=lowcost[i];}}ans+=micost;demo.push_back(micost);closest[e]=-1;num++;}} return ans;
}
int main(){cin>>m>>n;memset(G,INF,sizeof(G));for(int i=0;i<n;i++){int a,b,c;cin>>a>>b>>c;G[b][a]=G[a][b]=c;}cout<<prim()<<endl;for(int i=0;i<m-1;i++){cout<<demo[i]<<" ";}return 0;
}Kruskal算法
对边进行贪心操作。从最短的边开始,把它加入到MST中,在剩下的边中找最短的边,加入到 MST中,继续这个过程,直到所有的点都在MST中。适用于稀疏图。
kruskal算法的两个关键技术:
(1)对边进行排序
(2)判断圈,即处理连通性问题。这个问题用并查集简单而高效,并查集是krustral算法的绝配。
例题:聪明的猴子
#include<bits/stdc++.h>
using namespace std;
int a[5005],x[5005],y[5005],f[5005];
struct Edge{int x,y;double w;
}edge[1000005];
int find(int x){if(x==f[x]){return x;}f[x]=find(f[x]);return f[x];
}
bool cmp(Edge a,Edge b){return a.w<b.w;
}
void merge(int x,int y){int xx=find(x);int yy=find(y);if(xx!=yy){f[yy]=xx;}
}
int main(){int n,m,cnt=0;scanf("%d",&m);for(int i=1;i<=m;i++){scanf("%d",&a[i]);}scanf("%d",&n);for(int i=1;i<=n;i++){scanf("%d",&x[i],&y[i]);}for(int i=1;i<=n;i++){f[i]=i;}for(int i=1;i<=n;i++){for(int j=i+1;j<=n;j++){double w=sqrt((x[i]-x[j])*(x[i]-x[j])+(y[i]-y[j])*(y[i]*y[j]));edge[++cnt]={i,j,w};}}sort(edge+1,edge+cnt+1,cmp);int num=0;double maxn=0.0;for(int i=1;i<=cnt;i++){if(find(edge[i].x)!=find(edge[i].y)){merge(edge[i].x,edge[i].y);num++;maxn=maxn>=edge[i].w?maxn:edge[i].w;}if(num==n-1){break;}}int ans=0;for(int i=1;i<=m;i++){if(a[i]>=maxn){ans++;}}printf("%d\n",ans);return 0;
}