// 引入OpenCV库中有关视频跟踪的头文件
#include "opencv2/video/tracking.hpp"
// 引入OpenCV库中有关图像处理的头文件
#include "opencv2/imgproc.hpp"
// 引入OpenCV库中有关视频输入的头文件
#include "opencv2/videoio.hpp"
// 引入OpenCV库中有关高级GUI功能的头文件
#include "opencv2/highgui.hpp"// 引入标准输入输出流库,用于控制台输入输出
#include <iostream>// 使用命名空间cv,避免每次调用OpenCV库时都需加cv::前缀
using namespace cv;
// 同样使用命名空间std,省略std::前缀
using namespace std;// 声明帮助函数
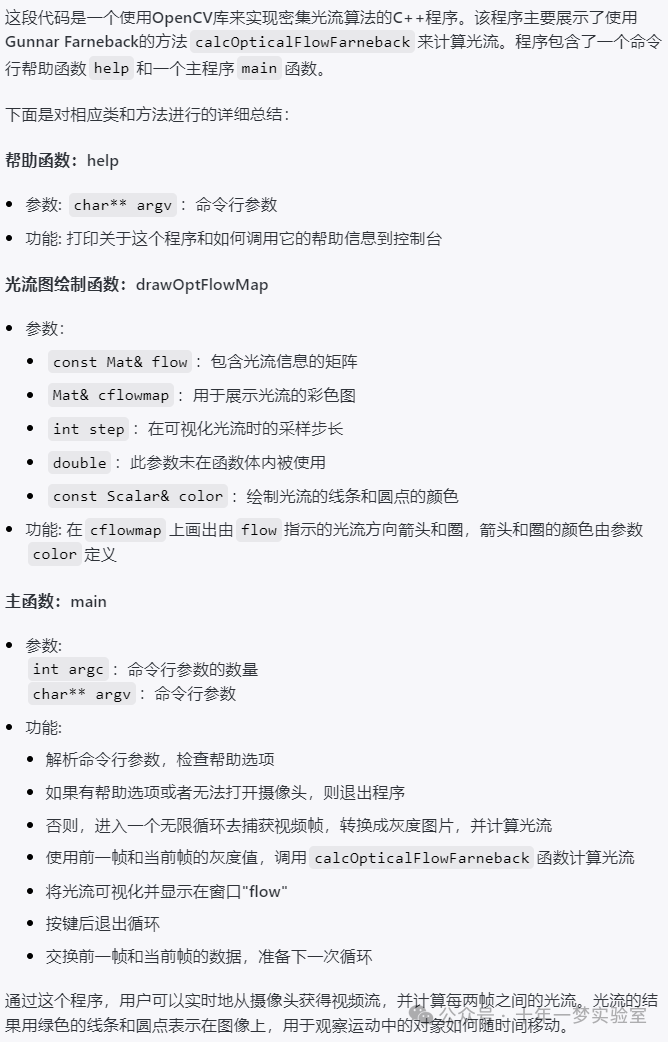
static void help(char** argv)
{// 输出说明信息,在控制台显示程序功能和使用方法cout <<"\nThis program demonstrates dense optical flow algorithm by Gunnar Farneback\n""Mainly the function: calcOpticalFlowFarneback()\n"// 说明如何调用程序"Call:\n"<< argv[0]// 默认使用摄像头0作为视频输入源<< "This reads from video camera 0\n" << endl;
}// 定义绘制光流图的函数
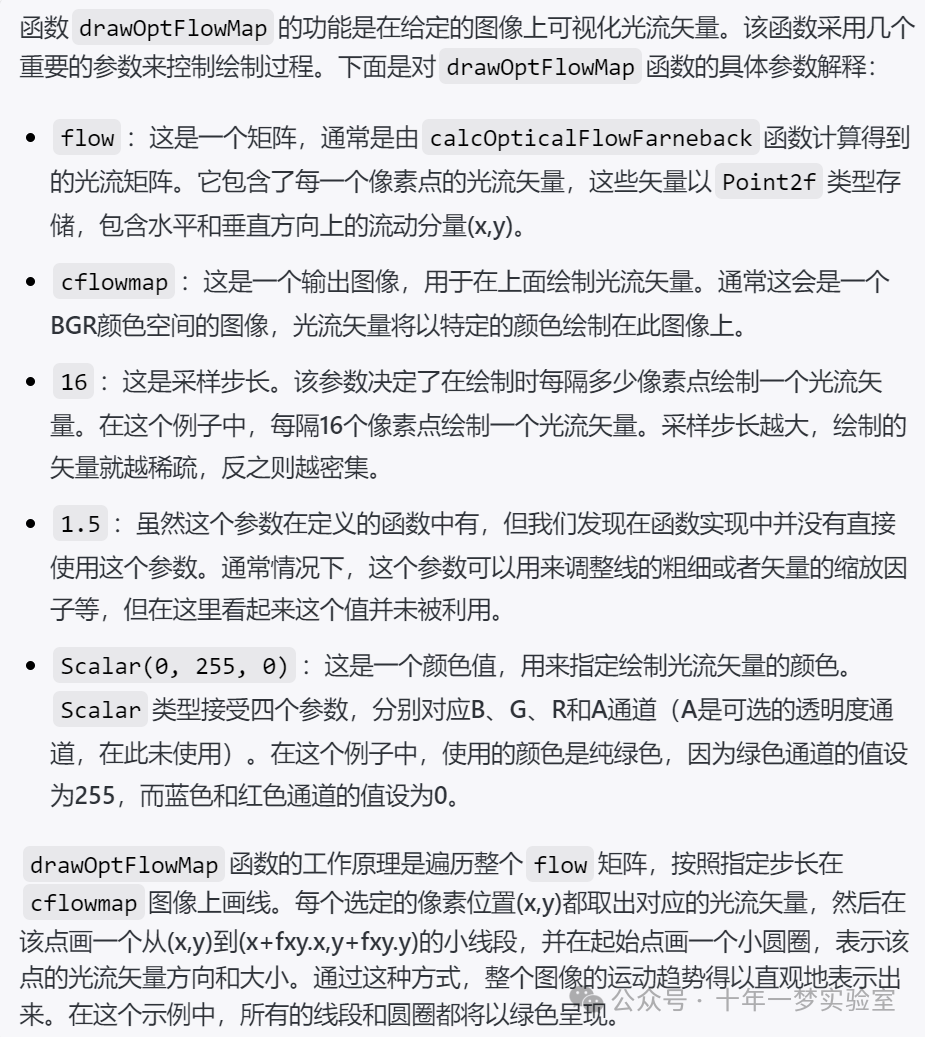
static void drawOptFlowMap(const Mat& flow, Mat& cflowmap, int step,double, const Scalar& color)
{// 遍历图像的每个step间隔的像素点for(int y = 0; y < cflowmap.rows; y += step)for(int x = 0; x < cflowmap.cols; x += step){// 获取光流计算结果中的点const Point2f& fxy = flow.at<Point2f>(y, x);// 在当前点和光流指向的位置之间绘制线段line(cflowmap, Point(x,y), Point(cvRound(x+fxy.x), cvRound(y+fxy.y)),color);// 在当前的点上绘制一个圆,表示光流的起点circle(cflowmap, Point(x,y), 2, color, -1);}
}// 程序入口点
int main(int argc, char** argv)
{// 命令行参数解析器,解析是否有帮助命令cv::CommandLineParser parser(argc, argv, "{help h||}");if (parser.has("help")){// 如果存在帮助命令,调用help函数并退出程序help(argv);return 0;}// 创建视频采集对象,默认从摄像头0开始获取视频数据VideoCapture cap(0);// 再次调用help函数help(argv);// 检查视频采集对象是否创建成功if( !cap.isOpened() )return -1;// 声明Mat类型的流对象,用于存储光流信息和结果Mat flow, cflow, frame;// 声明UMat类型对象,利于OpenCV GPU加速UMat gray, prevgray, uflow;// 创建一个新的窗口以显示结果namedWindow("flow", 1);for(;;) // 无限循环,除非手动终止{// 从VideoCapture对象读取一帧图像cap >> frame;// 将RGB图像转为灰度图像cvtColor(frame, gray, COLOR_BGR2GRAY);if( !prevgray.empty() ) // 检查是否是视频的第一帧{// 计算光流calcOpticalFlowFarneback(prevgray, gray, uflow, 0.5, 3, 15, 3, 5, 1.2, 0);// 将前一帧的灰度图像转为彩色图像cvtColor(prevgray, cflow, COLOR_GRAY2BGR);// 将光流结果从uflow复制到flowuflow.copyTo(flow);// 绘制光流图drawOptFlowMap(flow, cflow, 16, 1.5, Scalar(0, 255, 0));// 在窗口中显示结果imshow("flow", cflow);}if(waitKey(30)>=0) // 等待键盘输入,退出循环break;// 交换gray和prevgray,为处理下一帧图像做准备std::swap(prevgray, gray);}// 程序正常退出,返回0return 0;
}这段代码的主要功能是演示使用Gunnar Farneback算法计算视频序列中的稠密光流。程序从默认摄像头(通常是计算机的内置摄像头)捕捉视频帧,对于连续的帧,计算每一帧和它之前帧之间的光流,并且将光流结果绘制到原始的灰度图上面,从而生成了一个流动的效果以示光流场。每次迭代中读取的帧转换为灰度图像,然后使用calcOpticalFlowFarneback函数计算当前帧与上一帧之间的光流。使用drawOptFlowMap函数将计算的光流可视化,并通过OpenCV的imshow功能将结果显示在窗口中。用户可以通过键盘输入中断循环。
calcOpticalFlowFarneback(prevgray, gray, uflow, 0.5, 3, 15, 3, 5, 1.2, 0);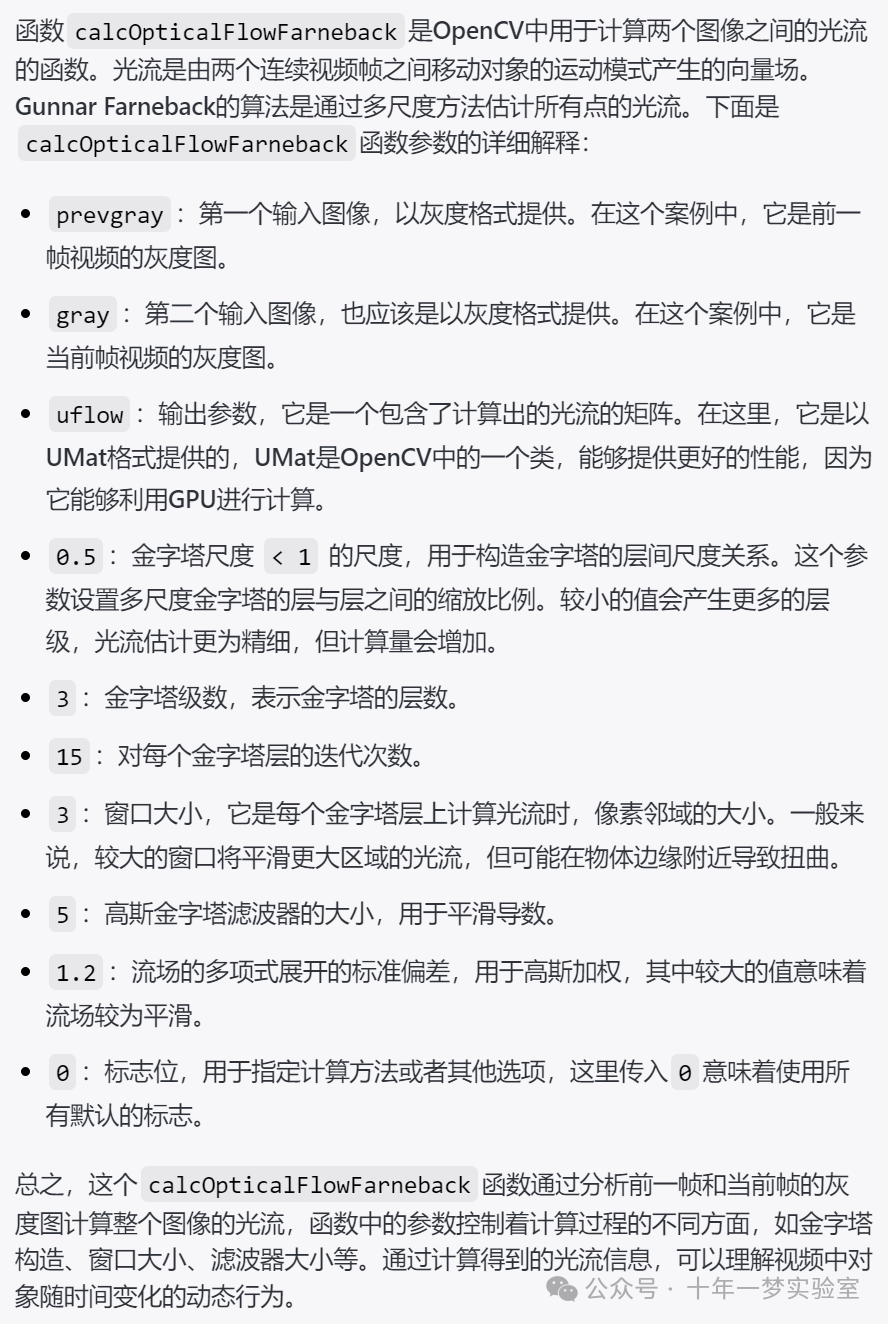
drawOptFlowMap(flow, cflow, 16, 1.5, Scalar(0, 255, 0));