这里写目录标题
- 一、freertos.c程序结构
- 二、创建任务函数
- 1、动态创建
- 2、静态创建
- 三、任务调用
一、freertos.c程序结构
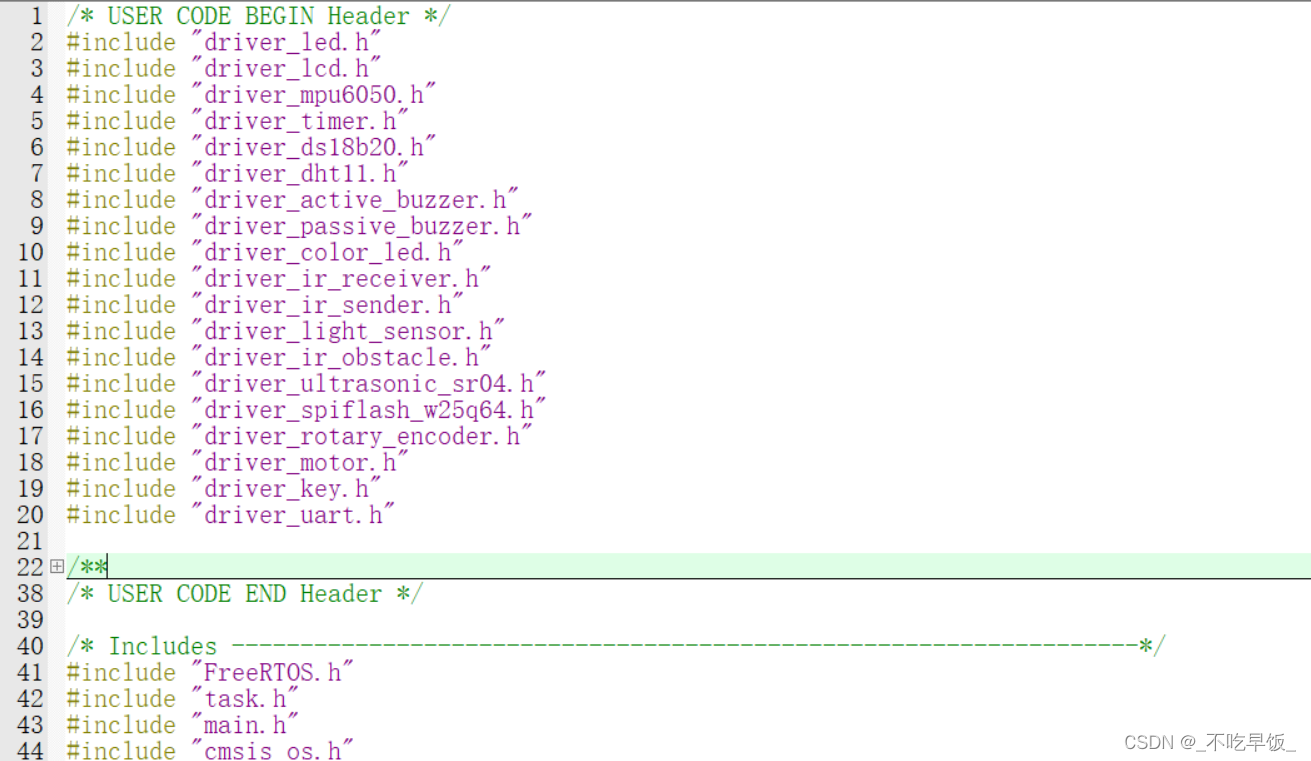
1、头文件
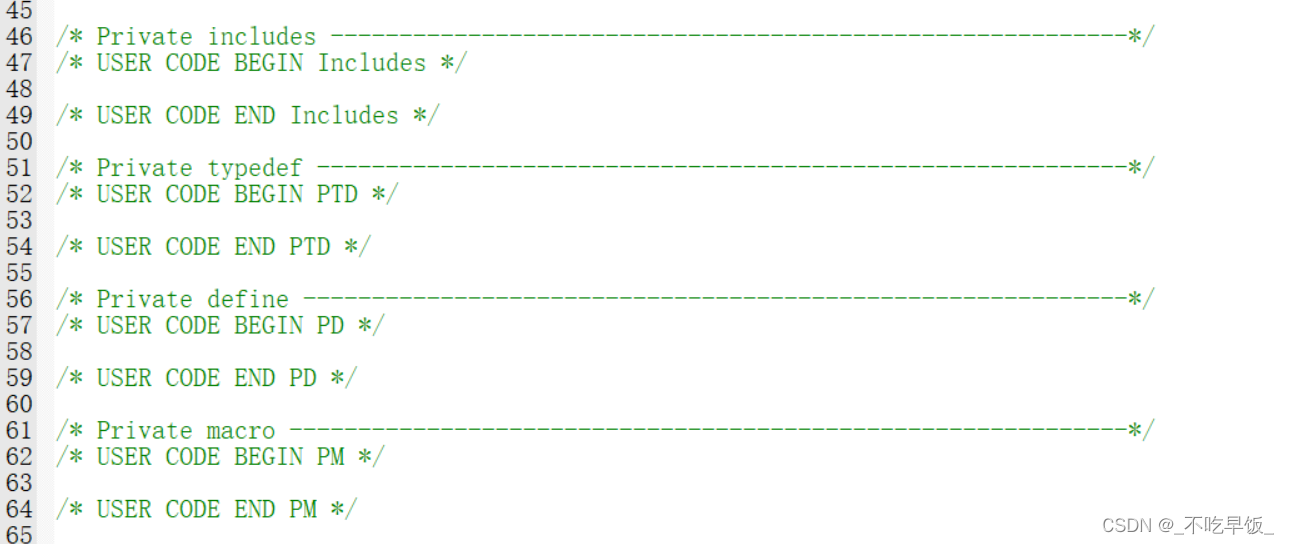
2、宏定义、typedef定义…
3、全局变量定义
以下是静态任务的相关变量配置,相当于正点原子例程里的TASK1、TASK2…任务配置
以下是默认任务的变量配置,相当于正点原子例程里的START_TASK任务配置

4、函数声明

void StartDefaultTask(void *argument)相当于正点原子例程里的void start_task(void *pvParameters),即开始任务函数
void MX_FREERTOS_Init(void)相当于正点原子例程里的void freertos_demo(void),即FreeRTOS例程入口函数
二、创建任务函数
1、动态创建
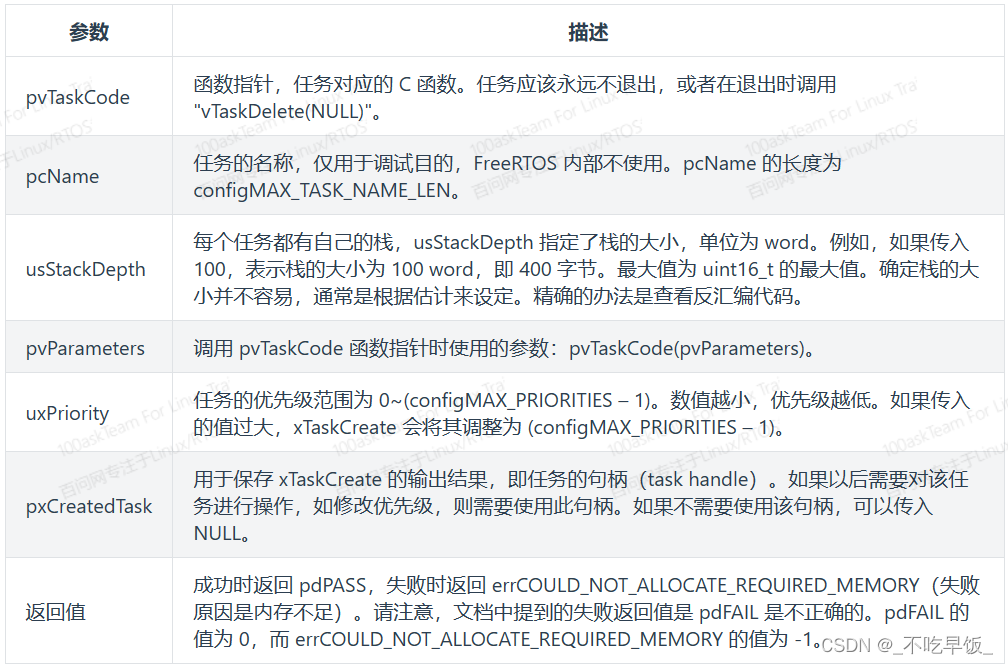
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, // 函数指针, 任务函数const char * const pcName, // 任务的名字const configSTACK_DEPTH_TYPE usStackDepth, // 栈大小,单位为word,10表示40字节void * const pvParameters, // 调用任务函数时传入的参数UBaseType_t uxPriority, // 优先级TaskHandle_t * const pxCreatedTask ); // 任务句柄, 以后使用它来操作这个任务
参数说明:
/* 创建任务: 声 */TaskHandle_t xSoundTaskHandle;BaseType_t ret;extern void PlayMusic(void *params);ret = xTaskCreate(PlayMusic, "SoundTask", 128, NULL, osPriorityNormal, &xSoundTaskHandle);2、静态创建
TaskHandle_t xTaskCreateStatic ( TaskFunction_t pxTaskCode, // 函数指针, 任务函数const char * const pcName, // 任务的名字const uint32_t ulStackDepth, // 栈大小,单位为word,10表示40字节void * const pvParameters, // 调用任务函数时传入的参数UBaseType_t uxPriority, // 优先级StackType_t * const puxStackBuffer, // 静态分配的栈,就是一个bufferStaticTask_t * const pxTaskBuffer // 静态分配的任务结构体的指针,用它来操作这个任务
);
相比于使用动态分配内存创建任务的函数,最后2个参数不一样:

/* 创建任务: 光 */
static StackType_t g_pucStackOfLightTask[128];
static StaticTask_t g_TCBofLightTask;
static TaskHandle_t xLightTaskHandle;
xLightTaskHandle = xTaskCreateStatic(Led_Test, "LightTask", 128, NULL, osPriorityNormal, g_pucStackOfLightTask, &g_TCBofLightTask);/* 创建任务: 色 */
xColorTaskHandle = xTaskCreateStatic(ColorLED_Test, "ColorTask", 128, NULL, osPriorityNormal, g_pucStackOfColorTask, &g_TCBofColorTask);三、任务调用
在void MX_FREERTOS_Init(void)里创建任务后任务调度器会自动调用任务,void StartDefaultTask(void *argument)里面编写默认任务,即开始任务,完整代码如下:
/* USER CODE BEGIN Header */
#include "driver_led.h"
#include "driver_lcd.h"
#include "driver_mpu6050.h"
#include "driver_timer.h"
#include "driver_ds18b20.h"
#include "driver_dht11.h"
#include "driver_active_buzzer.h"
#include "driver_passive_buzzer.h"
#include "driver_color_led.h"
#include "driver_ir_receiver.h"
#include "driver_ir_sender.h"
#include "driver_light_sensor.h"
#include "driver_ir_obstacle.h"
#include "driver_ultrasonic_sr04.h"
#include "driver_spiflash_w25q64.h"
#include "driver_rotary_encoder.h"
#include "driver_motor.h"
#include "driver_key.h"
#include "driver_uart.h"
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
static StackType_t g_pucStackOfLightTask[128];
static StaticTask_t g_TCBofLightTask;
static TaskHandle_t xLightTaskHandle;static StackType_t g_pucStackOfColorTask[128];
static StaticTask_t g_TCBofColorTask;
static TaskHandle_t xColorTaskHandle;/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {.name = "defaultTask",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityNormal,
};/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes *//* USER CODE END FunctionPrototypes */void StartDefaultTask(void *argument);void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) *//*** @brief FreeRTOS initialization* @param None* @retval None*/
void MX_FREERTOS_Init(void) {/* USER CODE BEGIN Init */TaskHandle_t xSoundTaskHandle;BaseType_t ret;/* USER CODE END Init *//* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* creation of defaultTask */defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* 创建任务: 声 */extern void PlayMusic(void *params);ret = xTaskCreate(PlayMusic, "SoundTask", 128, NULL, osPriorityNormal, &xSoundTaskHandle);/* 创建任务: 光 */xLightTaskHandle = xTaskCreateStatic(Led_Test, "LightTask", 128, NULL, osPriorityNormal,g_pucStackOfLightTask,&g_TCBofLightTask);/* 创建任务: 色 */xColorTaskHandle =xTaskCreateStatic(ColorLED_Test,"ColorTask",128,NULL,osPriorityNormal,g_pucStackOfColorTask,&g_TCBofColorTask);/* USER CODE END RTOS_THREADS *//* USER CODE BEGIN RTOS_EVENTS *//* add events, ... *//* USER CODE END RTOS_EVENTS */}/* USER CODE BEGIN Header_StartDefaultTask *//*** @brief Function implementing the defaultTask thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */LCD_Init();LCD_Clear();for(;;){IRReceiver_Test(); /* 影 */}/* USER CODE END StartDefaultTask */
}/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application *//* USER CODE END Application */