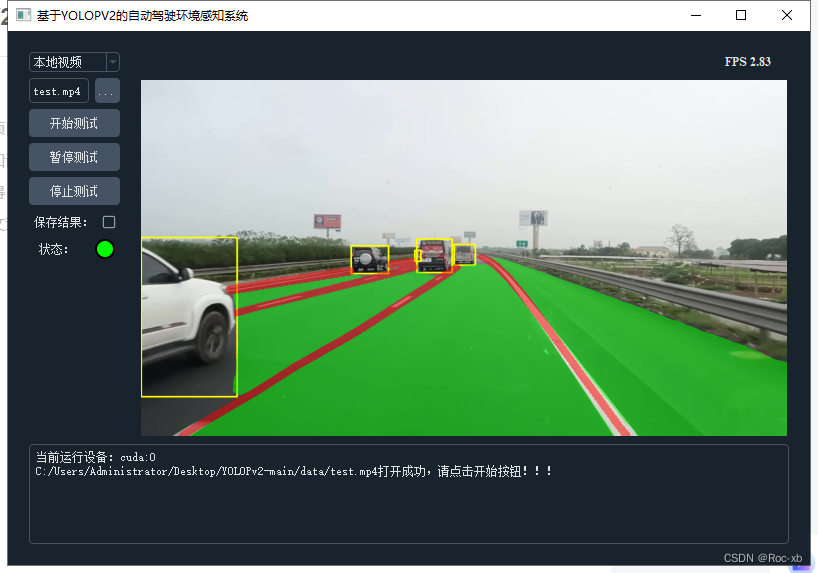
基于VOLOPV2的自动驾驶环境感知系统是一个复杂的系统,它主要负责实时检测并识别周围环境中的各种物体和信息,为自动驾驶车辆提供必要的感知数据。以下是对该系统的一个简要介绍:
环境感知是自动驾驶系统中的一个关键部分,它依赖于各类传感器来“看见”并理解周围的世界。这些传感器如同智能驾驶的“眼睛”,帮助车辆实时获取并处理周围环境的信息。
在VOLOPV2的自动驾驶环境感知系统中,常见的环境感知方式包括视觉感知(摄像头)、激光雷达感知、毫米波雷达感知以及超声波雷达感知等。
- 视觉传感器:按照安装位置及应用的不同,视觉传感器可划分为前视摄像头(单目/双目)、环视摄像头(广角)、侧视摄像头、后视摄像头、内置摄像头(驾驶员探测和车内物体探测等)等。视觉传感器主要用于障碍物探测、测速和测距、车道线检测、道路信息读取(如交通信号灯和交通标志识别)、地图构建与辅助定位,以及其他交通参与者的探测与识别(如车辆、行人和动物探测)。
- 激光雷达:激光雷达通过发射激光束并接收反射回来的信号来探测周围环境。它具有高精度和高分辨率的特点,能够生成详细的三维环境地图,为自动驾驶车辆提供准确的障碍物检测和定位信息。
- 毫米波雷达:毫米波雷达工作频段为30-300GHz,波长范围为1~10mm,介于厘米波和光波之间。它兼具微波制导和光电制导的优点,能够在恶劣的天气条件下和夜间进行有效的探测。毫米波雷达主要用于探测车辆周围的障碍物,并测量它们的距离和速度。
- 超声波雷达:超声波雷达通过发射超声波并接收反射回来的信号来探测周围环境。它主要用于近距离的障碍物探测和泊车辅助等场景。
这些传感器通过实时获取并处理周围环境的信息,为自动驾驶车辆提供必要的感知数据。然后,这些数据会被传输到自动驾驶系统的决策层和执行层,用于生成相应的控制指令,实现车辆的自动驾驶功能。
源码下载地址: 基于VOLOPV2的自动驾驶环境感知系统.zip
https://www.alipan.com/s/aaAw4nsCwa1