《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 23.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 24.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 26.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 28.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 30.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
| 31.【基于YOLOv8深度学习的100种中草药智能识别系统】 | 32.【基于YOLOv8深度学习的102种花卉智能识别系统】 |
| 33.【基于YOLOv8深度学习的100种蝴蝶智能识别系统】 | 34.【基于YOLOv8深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于YOLOv8深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于YOLOv8深度学习的复杂场景下船舶目标检测系统】 | 38.【基于YOLOv8深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于YOLOv8深度学习的智能道路裂缝检测与分析系统】 | 40.【基于YOLOv8深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于YOLOv8深度学习的遥感地理空间物体检测系统】 | 42.【基于YOLOv8深度学习的无人机视角地面物体检测系统】 |
| 43.【基于YOLOv8深度学习的木薯病害智能诊断与防治系统】 | 44.【基于YOLOv8深度学习的野外火焰烟雾检测系统】 |
| 45.【基于YOLOv8深度学习的脑肿瘤智能检测系统】 | 46.【基于YOLOv8深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于YOLOv8深度学习的橙子病害智能诊断与防治系统】 | 48.【车辆检测追踪与流量计数系统】 |
| 49.【行人检测追踪与双向流量计数系统】 | 50.【基于YOLOv8深度学习的反光衣检测与预警系统】 |
| 51.【危险区域人员闯入检测与报警系统】 | 52.【高压输电线绝缘子缺陷智能检测系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
YOLOv9刚出才3个月时间,这就出YOLOv10了,感觉这YOLO版本更新速度真心有点快。照这样下去,感觉YOLOv100也不远了…小伙伴们觉得呢?
闲话不多说,下面让我们一起看看YOLOv10都有哪些亮点吧。
源码、翻译后的论文和原始论文都已打包好,获取方式见文末,供需要的小伙伴们学习。
摘要
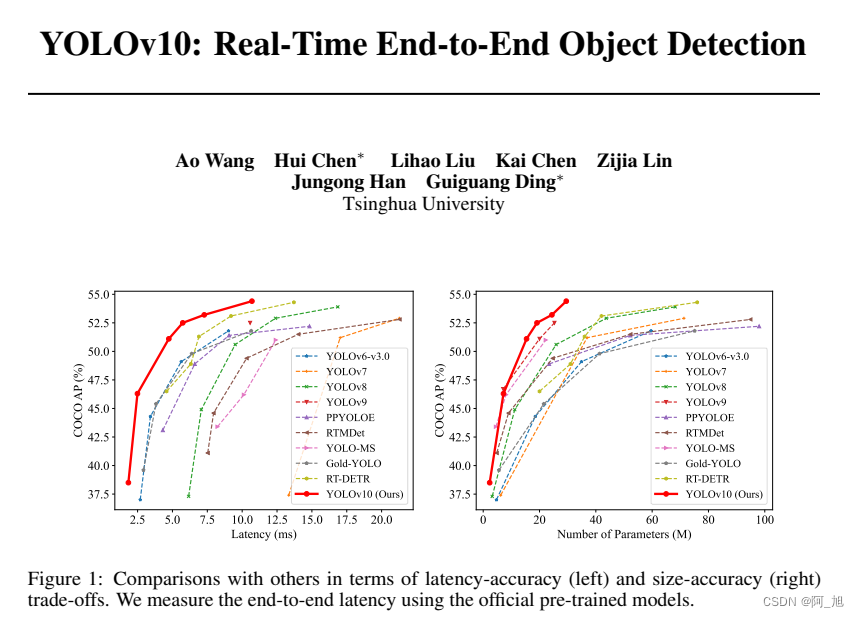
本文介绍了一种新的实时端到端目标检测算法—YOLOv10。该算法在YOLO系列的基础上进行了优化和改进,旨在提高性能和效率之间的平衡。首先,作者提出了连续双分配方法,以实现NMS-free训练,从而降低了推理延迟并提高了模型的性能。其次,作者采用了全面的效率-准确性驱动的设计策略,对YOLO的各种组件进行了综合优化,大大减少了计算开销,并增强了模型的能力。实验结果表明,YOLOv10在各种模型规模下都取得了最先进的性能和效率表现。例如,YOLOv10-S比RT-DETR-R18快1.8倍,同时拥有更小的参数数量和FLOPs;与YOLOv9-C相比,YOLOv10-B的延迟减少了46%,参数减少了25%,但保持了相同的性能水平。
论文方法
方法描述
该论文提出了一种名为YOLO(You Only Look Once)的目标检测算法,它通过一次前向传递来同时预测多个目标框及其类别。该算法使用卷积神经网络作为特征提取器,并将图像划分为网格,每个网格负责检测其中包含的目标。该算法还采用了双标签分配策略,以避免子像素级别的后处理,并提出了一个一致的匹配度量,以优化两个分支之间的匹配。
方法改进
双标签分配

与一对一配对不同,一对多配对为每个真实标签分配一个预测标签,避免了后处理中的非极大抑制(NMS)。然而,它会导致弱监督,从而导致较低的准确度和收敛速度[75]。幸运的是,这种缺陷可以通过一对多配对进行补偿[5]。为了实现这一目标,我们在YOLO中引入了双标签分配来结合这两种策略的优点。具体来说,如上图所示,我们为 YOLO 添加了一个额外的一对一头部。它保留了一致的结构,并采用与原始的一对多分支相同的学习目标,但利用一对一匹配获得标签分配。在训练过程中,两个头与模型一起联合优化,允许骨干网络和脖子从一对多分支提供的丰富监督信号中受益。在推理过程中,我们丢弃一对多头,并使用一对一头进行预测。这使得 YOLO 能够端到端部署,而无需付出任何额外的推断成本。此外,在一对一匹配中,我们采用了顶部选择,实现了与匈牙利匹配[4]相同的性能,同时减少了额外的训练时间。
模型设计改进
在模型设计方面,该论文提出了以下几种改进:
轻量级分类头: 通过对分类头进行轻量化设计,可以减少计算成本,而不会显著影响性能。
空间通道解耦降采样: 该方法通过分离空间和通道维度上的操作,提高了信息保留率,从而实现了更高的效率和竞争力。
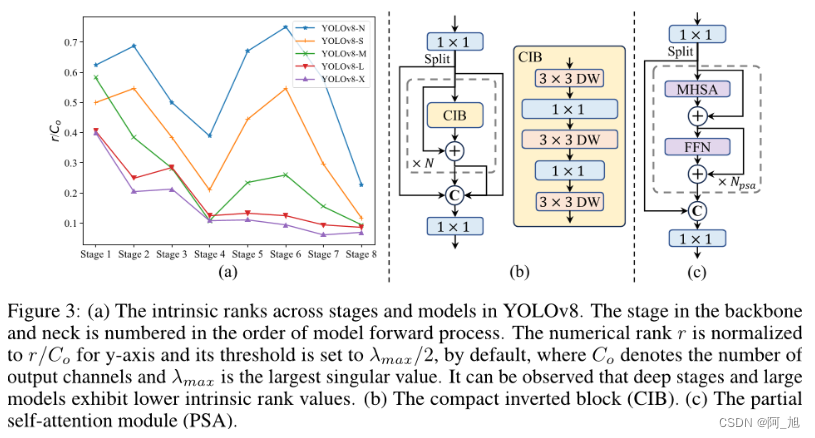
排名引导块设计: 该方法根据各个阶段的冗余程度,采用不同的基本构建块,以实现更高效的模型设计。
大核深度卷积和部分自注意力模块: 这些模块可以在不增加太多计算开销的情况下提高模型的表现力。
解决的问题
该论文提出的改进方法旨在提高YOLO算法的效率和准确性,以便更好地适应实际应用场景中的需求。通过采用双标签分配策略、一致的匹配度量以及轻量化的设计等手段,该算法能够在保持高准确性的前提下,大大降低计算复杂度,提高运行速度。此外,该论文还探索了大核深度卷积和部分自注意力模块等技术,进一步提升了模型的性能表现。
论文实验
实验细节
我们选择 YOLOv8 [20] 作为我们的基线模型,因为它在延迟准确度方面有很好的平衡,并且它可以在各种模型大小中使用。我们采用一致的双重分配来实现无 NMS 训练,并在此基础上进行整体效率准确率驱动的模型设计,从而带来了YOLOv10 模型。YOLOv10 和 YOLOv8 一样,也有 N / S / M / L / X 这样的变体。此外,我们还通过简单地增加 YOLOv10-M 的宽度比例因子推导出一个新的变体 YOLOv10-B。我们在相同从头开始训练设置[20, 59, 56]下验证了所提出的检测器。此外,所有模型的延迟都在遵循[71]的 T4 GPU 上以 TensorRT FP16 进行测试。
与最新技术对比
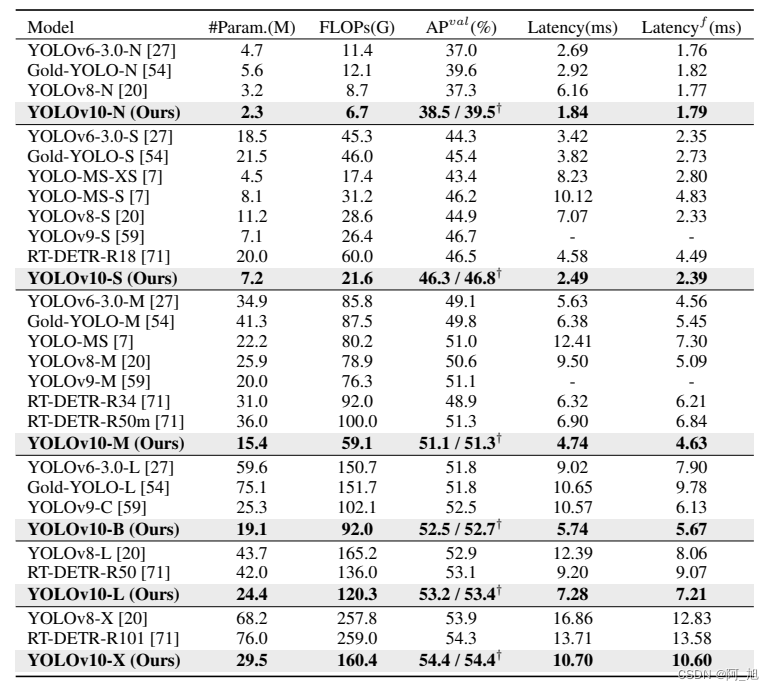
如表所示,我们的 YOLOv10 在各种模型规模上实现了最先进的性能和端到端延迟。我们首先比较了YOLOv10与我们的基线模型,即YOLOv8。在五个变体(N/S/M/L/X)中,YOLOv10 相比 YOLOv8 分别取得了 1.2%/1.4%/0.5%/0.3%/0.5% 的AP提升,参数减少了 28%/36%/41%/44%/57%,计算量减少了 23%/24%/25%/27%/38%,延迟降低了 70%/65%/50%/41%/37%。与其他 YOLO 模型相比,YOLOv10 还表现出对准确性和计算成本之间优越的权衡。具体来说,对于轻量级和小型模型,YOLOv10-N/S 比 YOLOv6-3.0-N/S 的 AP 高出 1.5 个单位,计算量少 2.0 倍。
在不同的模型规模中,YOLOv10 也显示出了最先进的性能和效率,这表明我们的架构设计的有效性。
模型分析
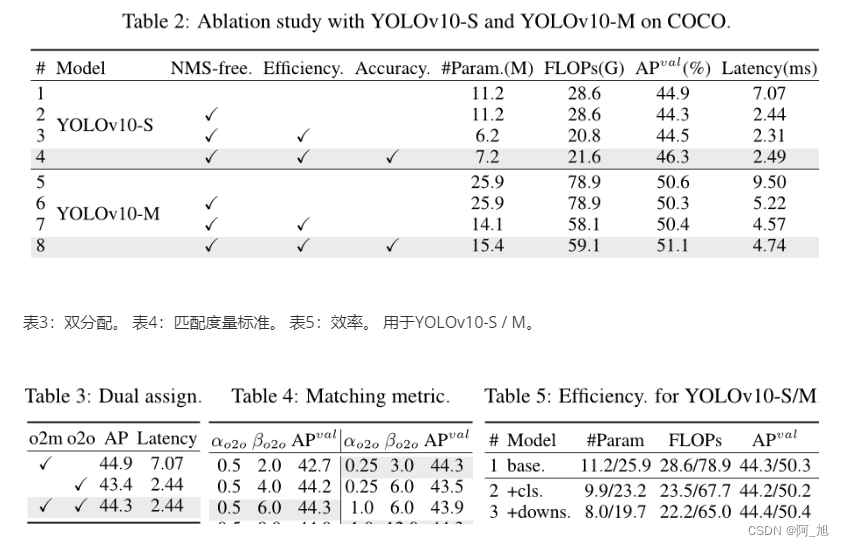
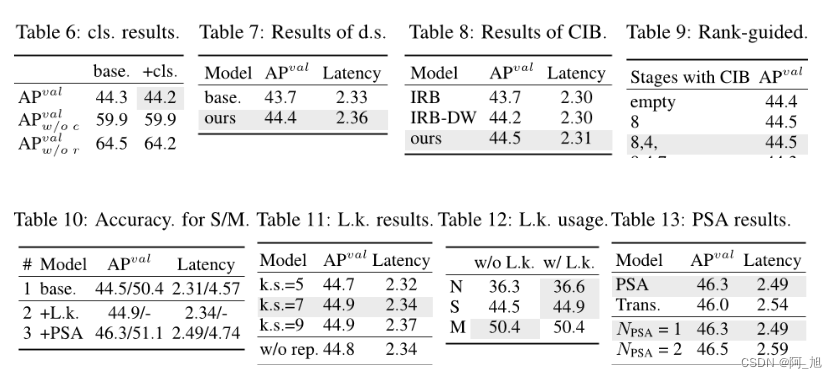
消融研究。我们在表2中展示了基于YOLOv10-S和YOLOv10-M的消融结果。可以观察到,我们的NMS免费训练与一致的双重分配显著减少了YOLOv10-S的端到端延迟4.63毫秒,同时保持了具有竞争力的性能AP为44.3%。此外,我们效率驱动的模型设计导致参数减少11.8M和计算量减少20.8GFlOPS,对于YOLOv10-M来说,延迟降低0.65毫秒,很好地显示了其有效性。此外,我们准确率驱动的模型设计在YOLOv10-S和YOLOv10-M上分别实现了1.8 AP和0.7 AP的显着改进,仅带来了0.18毫秒和0.17毫秒的延迟开销,这充分证明了它的优越性。
效率驱动模型设计分析实验
总的来说,本文的实验结果表明,YOLOv10在各种规模下都具有更好的性能和更高的效率,同时保持较高的准确率。此外,本文还提出了一些有效的改进措施,可以进一步提高模型的性能和效率。
论文总结
文章优点
本文针对YOLO系列模型在性能和效率方面的不足进行了深入研究,并提出了有效的解决方案。
作者采用了新颖的一对多标签分配策略来消除NMS操作,同时保持了较高的检测精度。
在模型架构方面,作者提出了一种全面的效率和准确性驱动的设计策略,包括轻量级分类头、空间通道分离下采样和排名引导块等设计,以提高模型的效率和准确性。
实验结果表明,作者提出的YOLOv10系列模型在计算效率和准确率方面均优于先前的先进检测器,具有很高的实用价值。
方法创新点
本文提出了一个新颖的一对多标签分配策略,可以消除NMS操作,从而提高了检测速度并减少了超参数的影响。
作者还提出了一种全面的效率和准确性驱动的设计策略,该策略涵盖了多个组件,包括轻量级分类头、空间通道分离下采样和排名引导块等设计,以提高模型的效率和准确性。
未来展望
本文提出的YOLOv10系列模型为实时端到端目标检测提供了一个新的选择,可以在计算效率和准确率之间取得更好的平衡。
未来的研究可以进一步探索如何优化YOLOv10系列模型的训练过程,以获得更高的准确性和更快的速度。
另外,也可以考虑将YOLOv10系列模型与其他先进的深度学习技术相结合,以实现更高级别的目标检测任务。
资料获取
关于YOLOv10源码、翻译后的论文以及原始论文都已打包好,供需要的小伙伴们学习,获取方式如下:
关注文末名片G-Z-H:【阿旭算法与机器学习】,发送【YOLOv10】即可获取下载方式