一、用户空间和内核空间
以Linux系统为例,ubuntu和CentOS是Linux的两种比较常见的发行版,任何Linux发行版,其系统内核都是Linux。我们在发行版上操作应用,如Redis、Mysql等其实是无法直接执行访问计算机硬件(如cpu,内存,网卡等)的操作的,所以需要借助发行版去访问内核,再通过内核去访问计算机硬件。

那么问题来了,我们想要用户的应用来访问,计算机就必须要对外暴露一些接口,从而实现对内核的操控,但是内核本身上来说也是一个应用,所以他本身也需要一些内存,cpu等设备资源,用户应用本身也在消耗这些资源,如果不加任何限制,用户随意地去操作系统资源,就有可能导致一些冲突,甚至有可能导致系统出现无法运行的问题,所以把用户和内核隔离开是十分有必要的。因此,用户空间和内核空间应运而生。
在Linux系统中,权限分成两个等级,0和3,用户空间只能执行受限的命令(Ring3),而且不能直接调用系统资源,而内核可以执行特权命令(Ring0),调用一切系统资源。所以一般情况下,用户的操作是运行在用户空间,而内核运行的数据是在内核空间的,而某些情况下,一个应用程序需要去调用一些特权资源,其就要去调用一些内核空间的操作,所以此时他需要在用户态和内核态之间进行切换。
注:
Linux系统为了提高IO效率,在用户空间和内核空间都加入缓冲区。
写数据时,要把用户缓冲区的数据拷贝到内核缓冲区,然后写入设备;
读数据时,要从设备读取数据到内核缓冲区,然后拷贝到用户缓冲区。
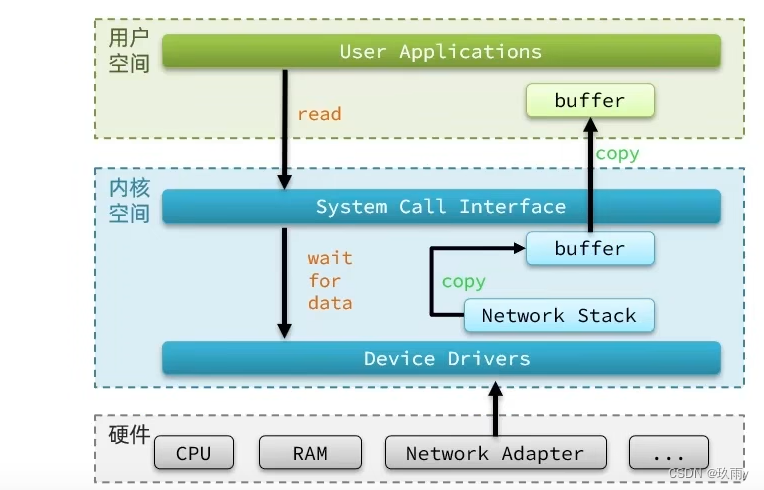
上图是用户应用读取数据时的流程图,其中用户在两个阶段需要等待:
- 驱动程序从硬件上读取数据,内核会将读取到的数据写入到内核缓冲区
- 将内核缓冲区的数据拷贝到用户缓冲区中
这也是不同网络模型主要优化的两个方面,在理解了上述流程后,我们正式进入到网络模型的介绍中!
二、网络模型
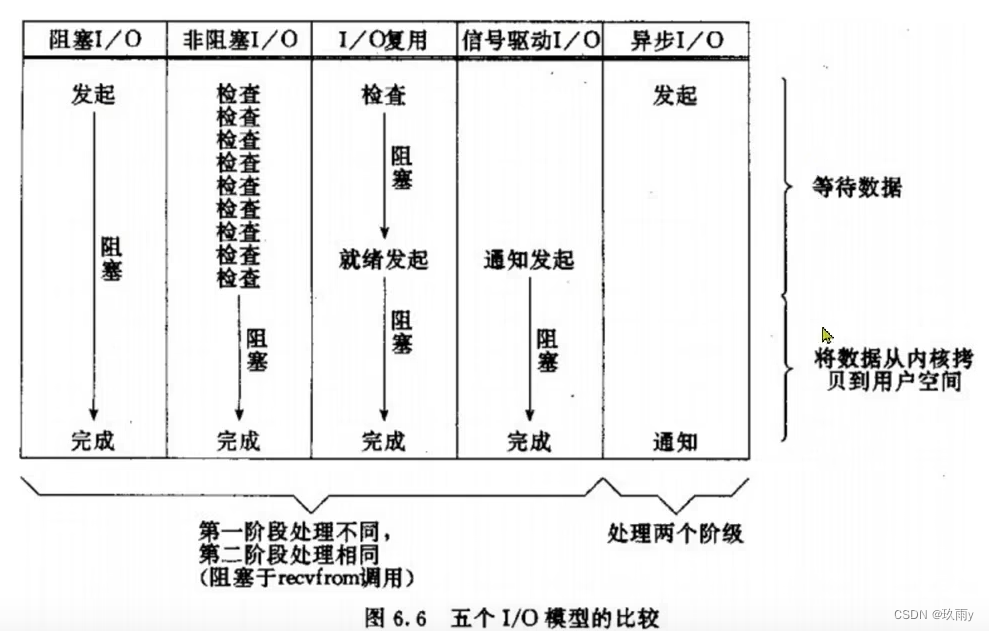
1. 阻塞IO(Blocking IO)
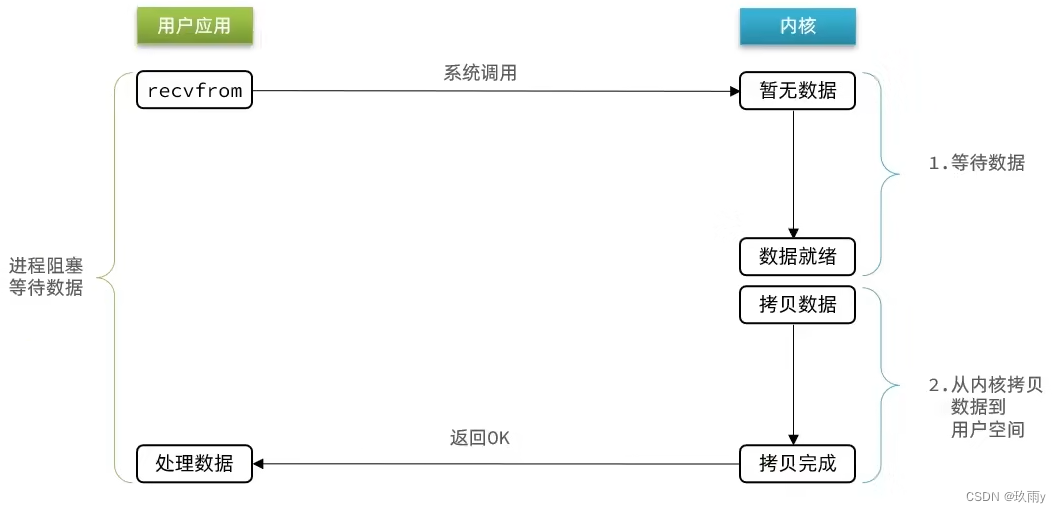
用户读取数据时,会先发起一个recvform命令,尝试从内核上加载数据,如果内核没有数据,那么用户就会阻塞等待,此时内核会去从硬件上读取数据,内核读取数据之后,再把数据拷贝到用户空间,并且返回OK,整个过程,都是阻塞等待的,这就是阻塞IO。
总结:
顾名思义,阻塞IO就是两个阶段都必须阻塞等待。
阶段一:
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据
- 此时用户进程也处于阻塞状态
阶段二:
- 数据到达并拷贝到内核缓冲区,代表已就绪
- 将内核数据拷贝到用户缓冲区
- 拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
2. 非阻塞IO(Nonblocking IO)
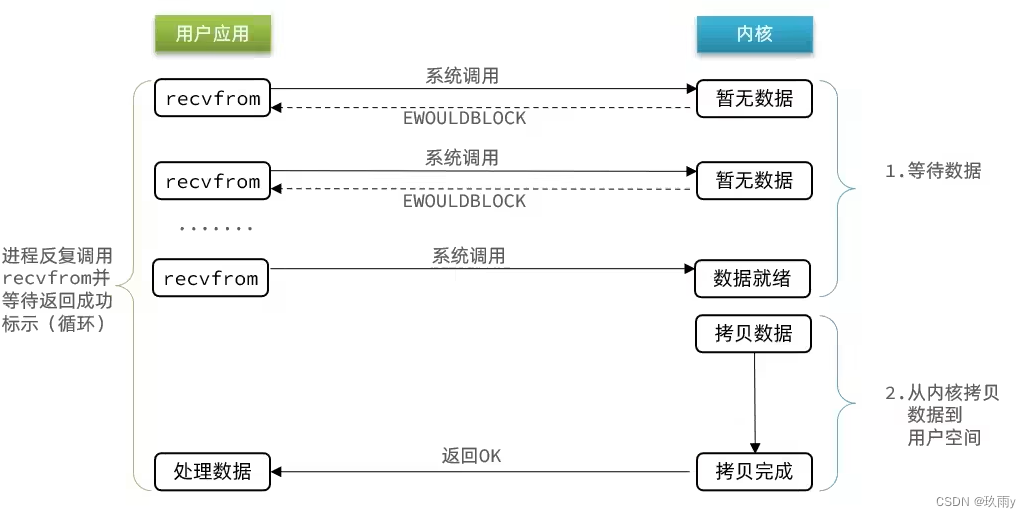
用户读取数据时,会先发起一个recvform命令,尝试从内核上加载数据,如果内核没有数据,会返回给用户一个异常,之后用户会再次发起请求,直至数据就绪,之后把数据拷贝到用户空间,并且返回OK,在拷贝数据到用户空间时,是阻塞等待的,这就是非阻塞IO。
总结:
非阻塞IO的recvfrom操作会立即返回结果而不是阻塞用户进程。
阶段一:
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据
- 返回异常给用户进程
- 用户进程拿到error后,再次尝试读取
- 循环往复,直到数据就绪
阶段二:
- 将内核数据拷贝到用户缓冲区
- 拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
可以看到,在非阻塞IO模型中,用户进程在第一个阶段是非阻塞,只有第二个阶段是阻塞状态。不过虽然是非阻塞,但其采用的是再次请求,因此性能并没有得到提高。而且忙等机制会导致CPU空转,CPU使用率暴增。
3. IO多路复用(IO Multiplexing)
无论是阻塞IO还是非阻塞IO,用户应用在一阶段都需要调用recvfrom来获取数据,差别在于无数据时的处理方案,我们前面已经分析过,这两种方案性能都不好。
而在单线程情况下,只能依次处理IO事件,如果正在处理的IO事件恰好未就绪(数据不可读或不可写),线程就会被阻塞,这会导致所有IO事件都必须等待(即使已经有就绪的事件),性能自然会很差。我们知道,Redis的网络模型就是IO多路复用,那么IO多路复用有何优化呢?
在IO多路复用网络模型中,用户去读取数据时,不再去直接调用recvfrom了,而是调用select函数,select函数会将需要监听的数据交给内核,由内核去检查这些数据是否就绪了,如果说这个数据就绪了,就会通知应用程序数据就绪,然后来读取数据,再从内核空间把数据拷贝给用户空间,完成数据处理,如果所有的数据都没就绪,此时再进行等待。

总结:
文件描述符(File Descriptor):简称FD,是一个从0开始的无符号整数,用来关联Linux中的一个文件。在Linux中一切皆文件,例如常规文件、视频、硬件设备等,当然也包括网络套接字(Socket)。
IO多路复用利用单个线程来同时监听多个FD,并在某个FD可读、可写时得到通知,从而避免无效的等待,充分利用CPU资源。
阶段一:
- 用户进程调用select,指定要监听的FD集合
- 核监听FD对应的多个Socket
- 任意一个或多个Socket数据就绪则返回readable
- 此过程中用户进程阻塞
阶段二:
- 用户进程找到就绪的Socket
- 依次调用recvfrom读取数据
- 内核将数据拷贝到用户空间
- 用户进程处理数据
此外,在监听FD的方式、通知的方式有多种实现,常见的有:
- select
- poll
- epoll
其中select和poll相当于是当被监听的数据准备好之后,他会把你监听的FD整个数据都发给你,你需要到整个FD中去找哪些是就绪的,需要通过遍历的方式,所以性能也并不是那么好。而epoll,相当于数据准备好了之后,会把准备好的数据直接发给你,省去了遍历的动作,因此性能最好。
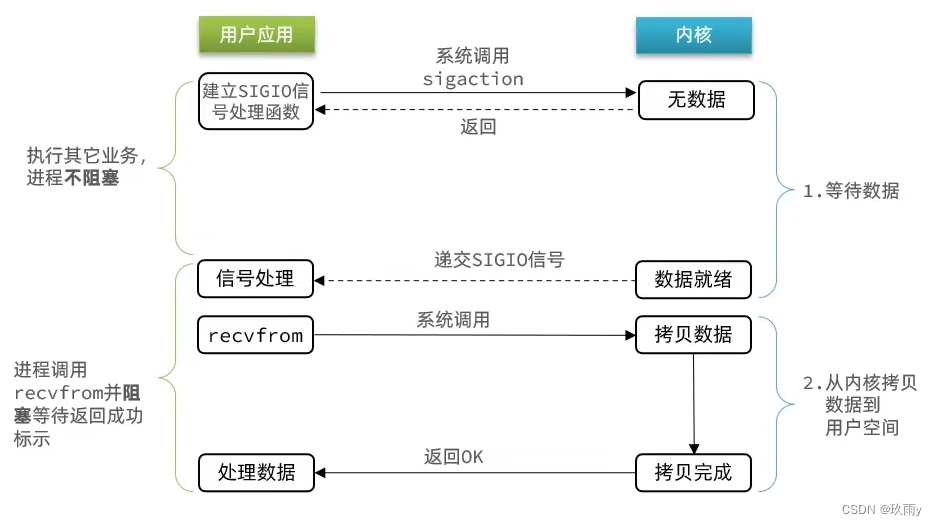
4. 信号驱动IO(Signal Driven IO)
信号驱动IO是与内核建立SIGIO的信号关联并设置回调,当内核有FD就绪时,会发出SIGIO信号通知用户,期间用户应用可以执行其它业务,无需阻塞等待。
总结:
当有大量IO操作时,信号较多,SIGIO处理函数不能及时处理可能导致信号队列溢出,而且内核空间与用户空间的频繁信号交互性能也较低。
阶段一:
- 用户进程调用sigaction,注册信号处理函数
- 内核返回成功,开始监听FD
- 用户进程不阻塞等待,可以执行其它业务
- 当内核数据就绪后,回调用户进程的SIGIO处理函数
阶段二:
- 收到SIGIO回调信号
- 调用recvfrom读取数据
- 内核将数据拷贝到用户空间
- 用户进程处理数据
5. 异步IO(Asynchronous IO)
异步IO,不仅仅是用户态在试图读取数据后不阻塞,而且当内核的数据准备完成后,也不会阻塞。

总结:
异步IO会由内核将所有数据处理完成后,包含将数据写入到用户空间中,才算完成,所以性能极高,不会有任何阻塞,全部都由内核完成。可以看到,异步IO模型中,用户进程在两个阶段都是非阻塞状态。不过其在高并发的情况下也存在一些问题,比如,用户应用发送了过多的IO请求,因为IO操作比较费时,那么在内核空间可能会积累很多IO任务,从而导致系统因为内存占用过多而崩溃。所以,异步IO需要采用合适的限流措施。
三、对比