2024年5月26日,阿木实验室在深圳第四届中国智能汽车创新大会上,开展的《Prometheus开源平台-ROS无人机追踪小车项目开发实战课》圆满结束。
该实战课从初学者的角度出发,通过实践性讲解和开发,使开发者们系统地学习了硬件系统架构、视觉感知(采用YOLOv5识别)和控制接口的应用。同时,在实际的飞行器上验证了无人机追踪无人车的功能。通过这次培训,相信能够帮助开发者们进一步提升技能,为无人机开发和应用奠定坚实的基础。
ROS无人机追踪小车项目开发实战课-视频回顾 https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&tempkey=MTI3MV9ZMXIyTlAvaXZRYWtxNkxYVnNfb19PblRld2xWUm9vZXdZMXJkY3pMTDRiQXNHNWxKWnExaXFJN3JlSHdDa3VxTWVrSnFJY2pEV3JkeEl5SE01RFhNSEV2aUY0WEs1ZGlaZnlVSUc3REF4YmVwNjQ4ajhEdnEwYURJYW4wZ1JmQU4xbmQ0RGR4TzV5cUl3MkNWeFhxQnIwMEtzNE5wTVhzWWhuSHNRfn4%3D&chksm=170ed2b020795ba6df24e5da6920f0bb3d5bbb6cf3206bd4927cc3c6e24de139315fc4711576&__mpa_temp_link_flag=1&token=237290563#rd
https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&tempkey=MTI3MV9ZMXIyTlAvaXZRYWtxNkxYVnNfb19PblRld2xWUm9vZXdZMXJkY3pMTDRiQXNHNWxKWnExaXFJN3JlSHdDa3VxTWVrSnFJY2pEV3JkeEl5SE01RFhNSEV2aUY0WEs1ZGlaZnlVSUc3REF4YmVwNjQ4ajhEdnEwYURJYW4wZ1JmQU4xbmQ0RGR4TzV5cUl3MkNWeFhxQnIwMEtzNE5wTVhzWWhuSHNRfn4%3D&chksm=170ed2b020795ba6df24e5da6920f0bb3d5bbb6cf3206bd4927cc3c6e24de139315fc4711576&__mpa_temp_link_flag=1&token=237290563#rd
实战课程教具展示
-
Prometheus 450科研无人机
Prometheus 450(简称P450)是一款室内室外两用的中型轴距(410mm)无人机,基于F450基础飞行平台,搭载感知传感器二维平面激光雷达,双目深度相机等,配合软件Prometheus自主无人机系统和SpireCV视觉库,可实现目标的识别与跟踪,以及路径规划EGO-Planner等。
阿木实验室,公众号:阿木实验室P450焕新而来,室内外两用+路径规划+YOLO点击跟踪,算力高达100TOPS

-
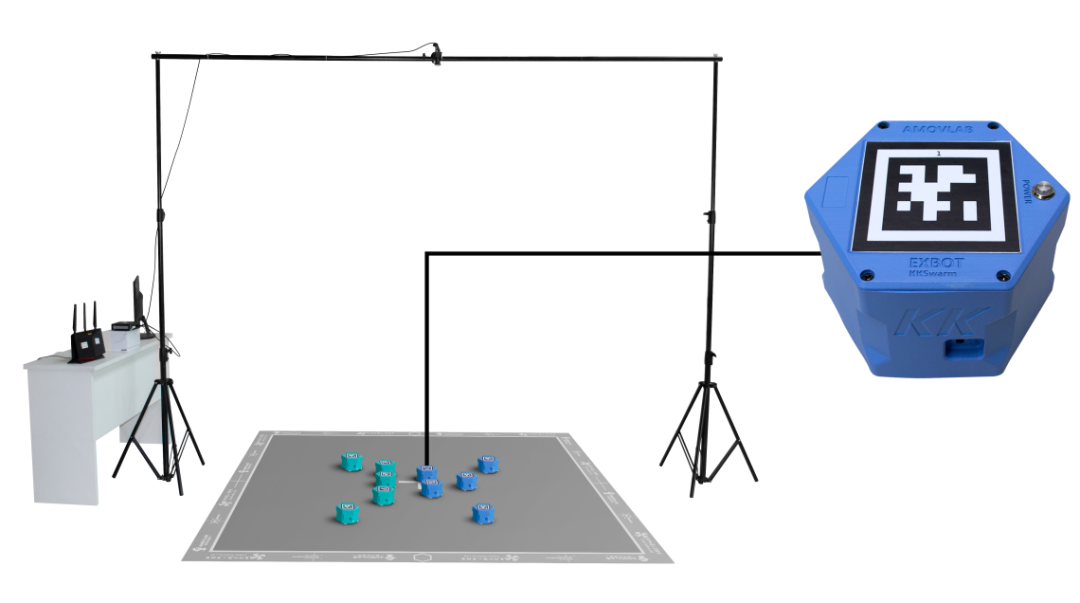
KKSwarm开源机器人集群套件
KKSwarm集群测试平台适用于多车编队、集群算法的验证与开发,以及强化学习的研究。通过搭建轻量级的仿真环境,再通过参数拟合让仿真和真实环境一致,让仿真环境和真实环境高度匹配,实现多智能体等算法的直接过渡。搭配低成本的机器人集群,让开发者可以快速在物理环境中验证算法,达到工程落地的目的。KKSwarm小车采用蜂窝六边形结构的设计,测试平台还配备了视觉定位摄像头、路由器、运算PC等配件,为研究人员搭建一个高效、易用的集群研究平台。
阿木实验室,公众号:阿木实验室KKSwarm功能升级,低成本实现多车集群与避障
现场回顾

本次项目实战课分为4个阶段,由阿木实验室合伙人-马远强担任项目讲师。课程从介绍无人机的硬件系统架构开始,然后深入讲解YOLOv5的深度神经网络训练,接着是Prometheus的控制接口学习,最后通过现场实操演练。通过理论结合实践的方式让学员们逐步深入学习,全面掌握本次实战课程内容。






开源生态的繁荣发展,需要各界携手一同完善开源生态环境,形成开源生态链。未来,阿木实验室还将持续为开发者和技术爱好者提供展示技能和创意的平台,带来更多领域的命题和更强大多元的技术指导和支持,为开源软件发展赋能,共同探索并创造一个充满可能性和创新的美好未来。
关于阿木实验室
成都铂贝科技有限公司,成立于2016年,是一家以无人系统技术开发和开源运营为核心的人工智能与机器人企业,公司位于成都市郫都区;公司自成立以来,合作客户包括高校、科研院所及科技企业超过500家,开发者社区用户超过10000人,与用户形成良好的开源生态关系。

阿木实验室是成都铂贝科技有限公司旗下的品牌。
阿木实验室以技术开源运营为基础,提供无人系统(无人机)整体解决方案,包括无人机软件硬件方案,涉及飞行控制、视觉感知、路径规划、三维仿真;以开源项目为核心,遵循着“ 让研发更高效 ”的核心理念,为行业带来更加持续的技术革新和日益完善的无人系统解决方案。
业务领域

联系我们
如需获取本次项目实战课程的讲义资料,请在文末评论区留言,我们将私信发给您。若您对阿木实验室的产品感兴趣,或者对人工智能方向有定制需求,欢迎联系我们。





![壁纸动态-Mac电脑-4K超高清[po破]动态壁纸[解]Dynamic WallPaper 安装使用教程](https://img-blog.csdnimg.cn/direct/019eac9ca68d450ba70375365c1b13ef.png#pic_center)