【LIN】STM32新能源汽车LIN通信实现过程
文章目录
- 前言
- 一、软件
- 二、接线图
- 三、硬件原理图
- 四、上位机
- 五、PICO示波器串行解码
- 1.软件中的LIN波特率设置-19200
- 2.PIC设置
- 3.PIC串行解码
- 六.引用
- 总结
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.控制器——STM32F103C8T6
2.仿真器——STLINK
3.LIN模块——TAJ1021集成芯片
4.USB转CAN/LIN分析仪
5.瑞萨LIN入门书
6.上位机——CANLINtools
7.PICO7
提示:以下是本篇文章正文内容,下面案例可供参考
STM32F103C8T6芯片通过串口打印PA2 PA3,初始化LIN通信
一、软件
//³õʼ»¯IO ´®¿Ú2
//pclk1:PCLK1ʱÖÓƵÂÊ(Mhz)
//bound:²¨ÌØÂÊ
void usart2_lin_init(u32 bound)
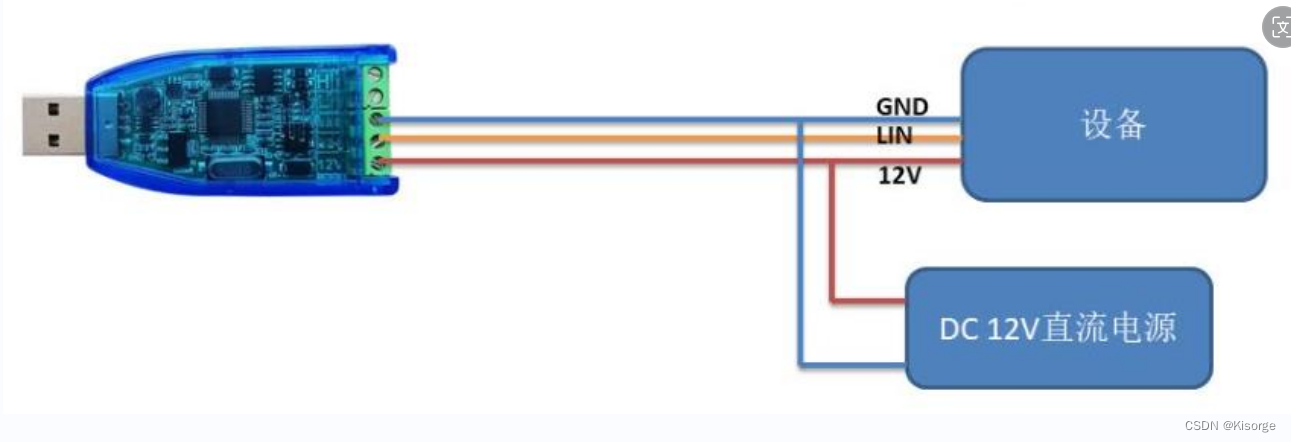
{ GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD, ENABLE);//ʹÄÜGPIOA,DʱÖÓRCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//ʹÄÜUSART2ʱÖÓGPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PD7¶Ë¿ÚÅäÖÃGPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³öGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìGPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //¸¡¿ÕÊäÈëGPIO_Init(GPIOA, &GPIO_InitStructure); RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,ENABLE);//¸´Î»´®¿Ú2RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,DISABLE);//Í£Ö¹¸´Î»USART_InitStructure.USART_BaudRate = bound;//²¨ÌØÂÊÉèÖÃUSART_InitStructure.USART_WordLength = USART_WordLength_8b;//8λÊý¾Ý³¤¶ÈUSART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλUSART_InitStructure.USART_Parity = USART_Parity_No;///ÆæżУÑéλUSART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆUSART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//ÊÕ·¢Ä£Ê½USART_Init(USART2, &USART_InitStructure); ; //³õʼ»¯´®¿ÚNVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; //ʹÄÜ´®¿Ú2ÖжÏNVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //ÏÈÕ¼ÓÅÏȼ¶2¼¶NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //´ÓÓÅÏȼ¶2¼¶NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //ʹÄÜÍⲿÖжÏͨµÀNVIC_Init(&NVIC_InitStructure); //¸ù¾ÝNVIC_InitStructÖÐÖ¸¶¨µÄ²ÎÊý³õʼ»¯ÍâÉèNVIC¼Ä´æÆ÷USART_ITConfig(USART2,USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ// USART_ITConfig(USART2,USART_IT_LBD, ENABLE);//¿ªÆôÖжÏUSART_LINBreakDetectLengthConfig(USART2,USART_LINBreakDetectLength_10b);USART_LINCmd(USART2, ENABLE);USART_Cmd(USART2, ENABLE); //ʹÄÜ´®¿Ú }二、接线图

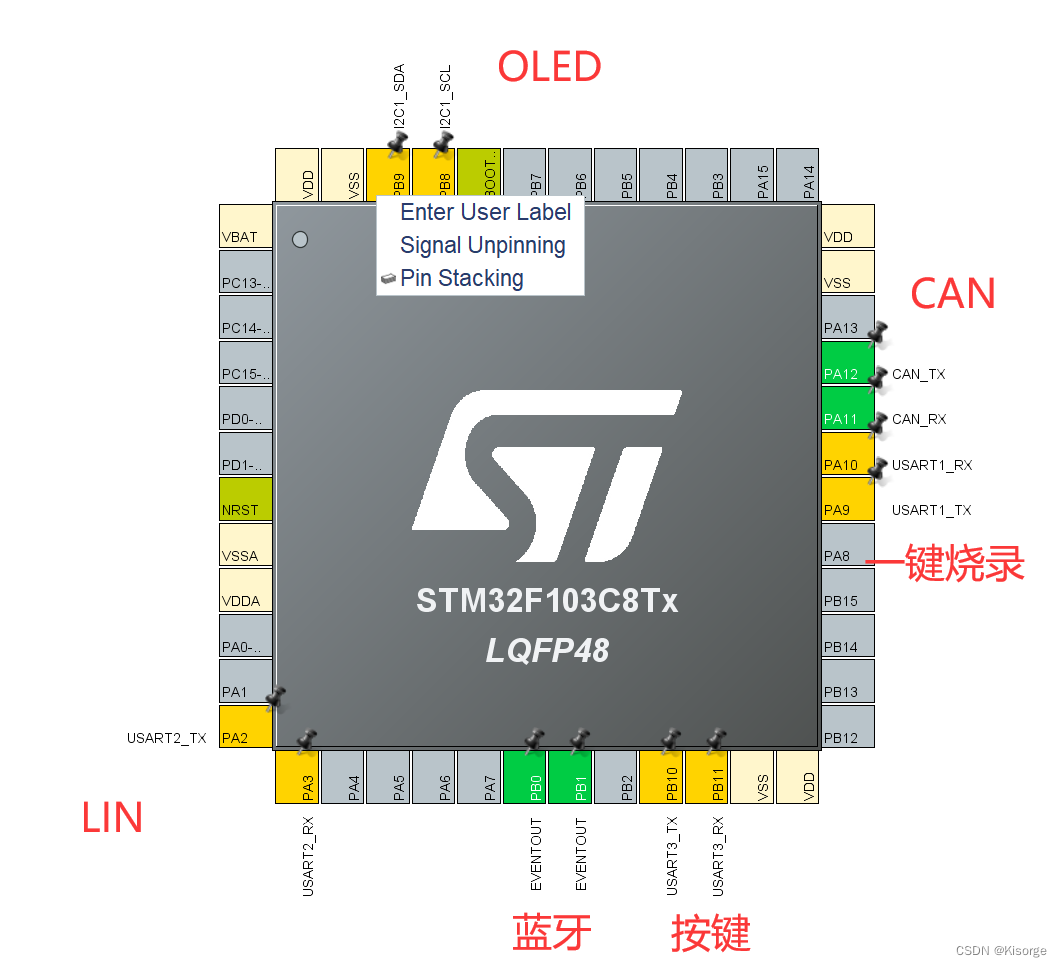
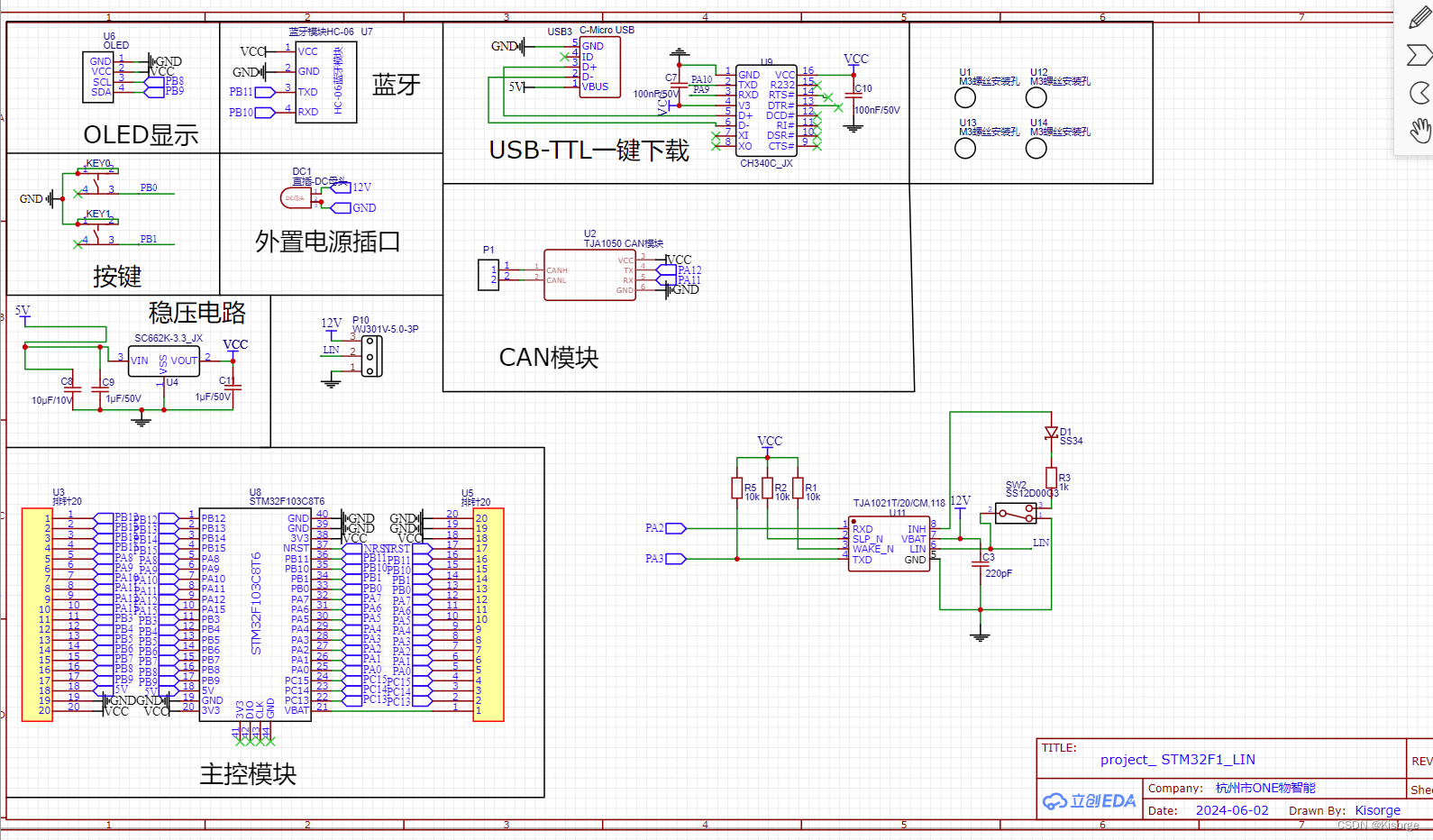
三、硬件原理图
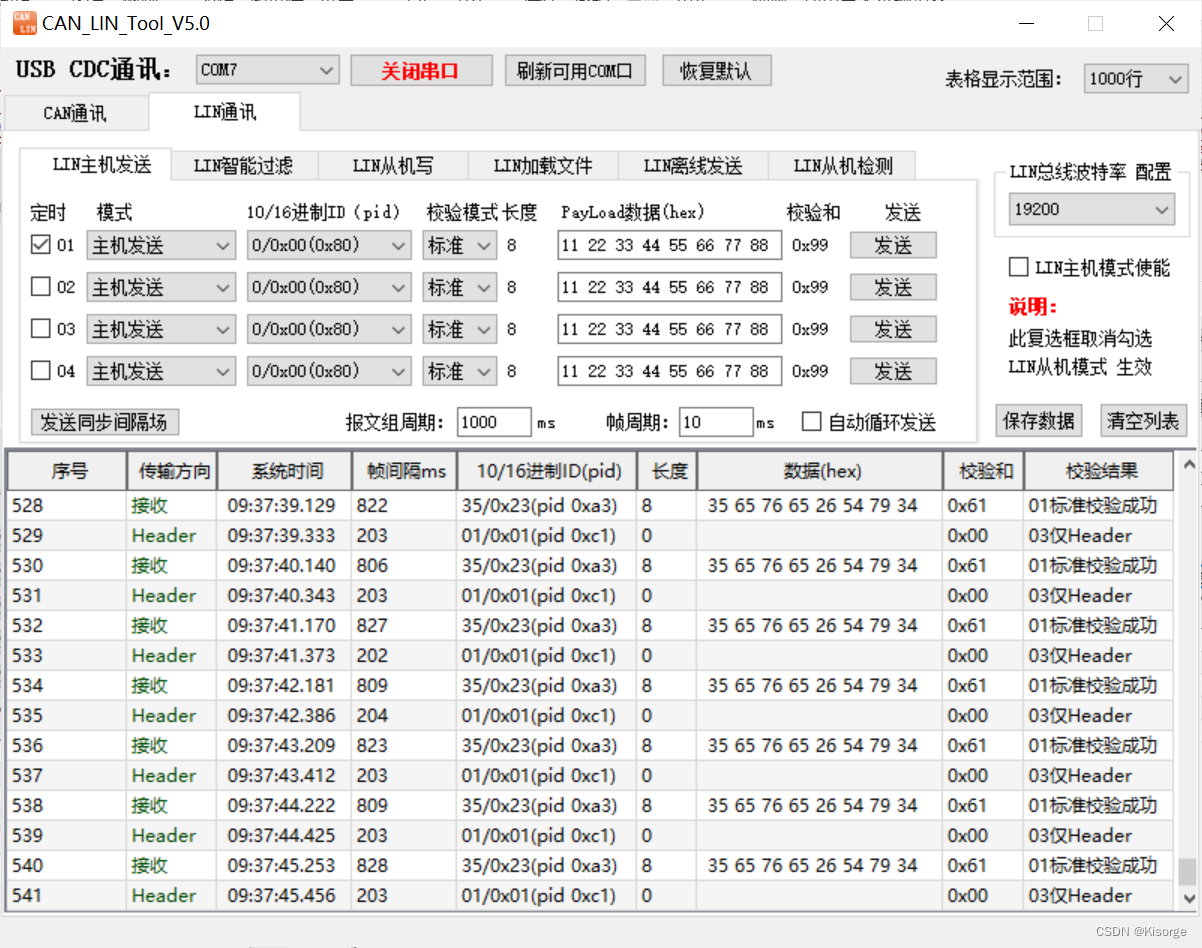
四、上位机
五、PICO示波器串行解码
1.软件中的LIN波特率设置-19200
usart2_lin_init(19200);
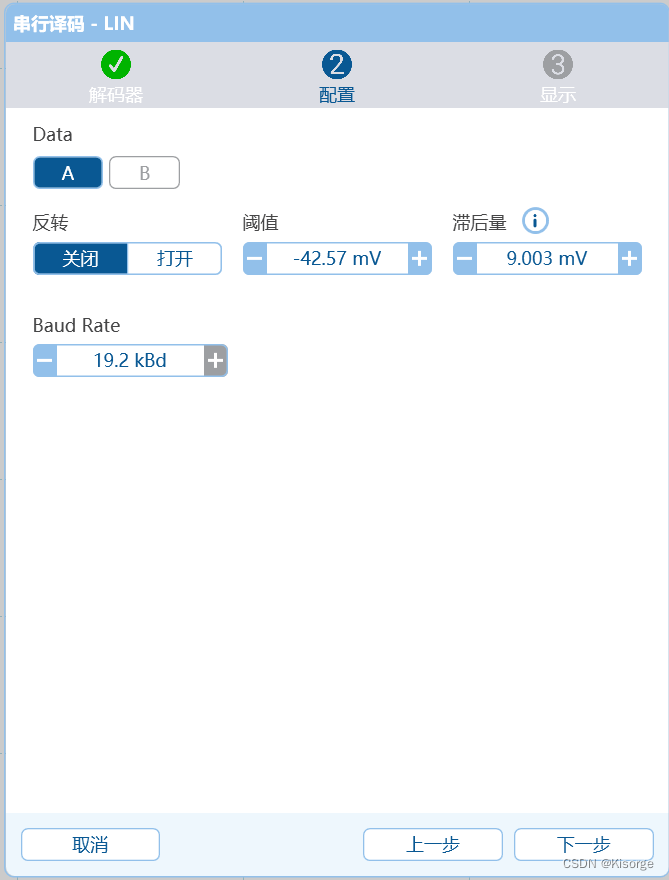
2.PIC设置
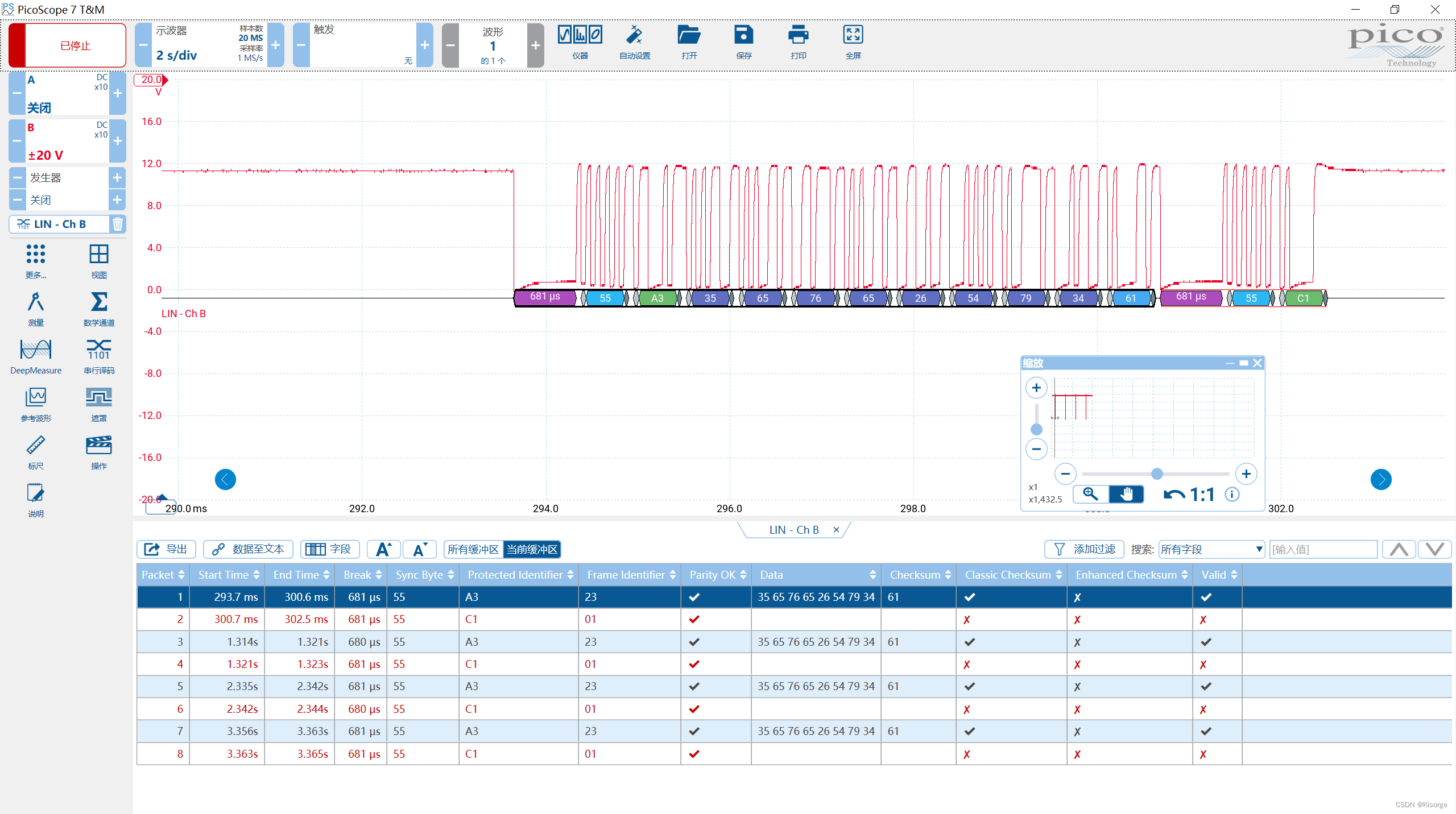
3.PIC串行解码
六.引用
总结
本文仅仅简单介绍了【LIN】STM32新能源汽车LIN通信实现过程,评论区欢迎讨论。



![壁纸动态-Mac电脑-4K超高清[po破]动态壁纸[解]Dynamic WallPaper 安装使用教程](https://img-blog.csdnimg.cn/direct/019eac9ca68d450ba70375365c1b13ef.png#pic_center)