目录
术语定义
一般要求
操纵装置
防护等级
识别代号
技术要求
通过性要求
直线行驶稳定性
环境适应性要求
功能安全要求
信息安全要求
故障处理要求
通信接口
在线升级(OTA)
线控驱动
动力性能
驱动控制响应能力
线控制动
行车制动
制动响应能力
线控转向
总体要求
线控转向响应能力
参考资料
术语定义
低速车无人车,最高车速不超过25km/h的纯电动非道路无人驾驶专用车。例如,用于配送、运输、零售、巡逻、清扫等特定场景的专用作业车辆。示例如下:

响应时间response fime,从驾驶自动化系统或操纵装置发出指令的时刻,与执行器响应指令开始执行且实际值开始产生变化的时刻,之间的差值。
稳态误差steady-sate error,线控驱动系统/线控制动系统/线控转向系统,执行相应动作过程中,期望的目标值与实际的稳态输出量的差值。相对于动态调整过程中的瞬时超调量误差。
事件数据记录系统event data recorder system:EDR,由一个或多个模块构成,具有监测、采集并记录各类事件发生前、发生时和发生后车辆数据功能的装置或系统。
一般要求
操纵装置
低速线控底盘使用人工操纵装置时,其遥控距离应不大于50m,若超出50m人工操纵装置应发出报警信号。操纵指令从发出到底盘开始执行相应操作,响应时间应不超过100ms;操纵指令丢失时,低速线控底盘应能立即停车并保持静态驻车。
当低速线控底盘处于“可行驶模式”,且遥控器超过1min未操作情况下,遥控器应解锁后才能正常操纵低速线控底盘。
低速线控底盘超出远程驾驶系统的规划控制范围后,远程驾驶系统应发出报警信号,低速线控底盘应能立即停车并保持静态驻车。
防护等级
按GB18384-2020中规定的B级电压,零部件防水等级要求依据整车满载时的安装区域而定,各区域内部件防护等级应满足GB/T4208相关规定,具体要求如下
a)电池及电气舱,防护等级不低于IPX3;
b)低速线控底盘下方有遮挡的高压部件,防护等级不低于IPX4;
c)低速线控底盘下方无遮挡的高压部件,防护等级不低于IPX7;
应按照下文指定的试验方法进行模拟清洗和模拟涉水试验,每次试验后,在低速线控底盘仍是潮湿的情况下,应按照GB 18384-2020中6.2.1规定的试验方法,进行绝缘电阻测量,绝缘电阳应满足GB 18384-2020中5.1.4.1的要求。
模拟清洗。针对整个低速线控底盘,采用GB/T4208中IPX5软管喷嘴,使用洁净的水,以流量为12.500L/min士0.625 L/min,在所有可能的方向向所有的边界线进行喷水,喷水持续时长不少于3min,喷嘴至边界线的距离为 3.0 m±0.5 m。
模拟涉水。低速线控底盘在100mm深的水池中,以10km/h士1km/h的速度行驶至少300m。如果水池长度小于300m,应重复试验使涉水距离累计不小于300m。
识别代号
低速线控底盘应具有唯一的底盘识别代号、驱动电机生产序列号、动力电池生产序列号,内容和构成应满足GB16735中的相关规定,底盘识别代号应打刻在车架外侧可见部位,且记载的特征信息不准许篡改,不准许被市场上可获取的工具读取。
技术要求
通过性要求
低速线控底盘应按照设计要求通过某些特定地形(如垂直障碍物、水平沟、涉水池等)。
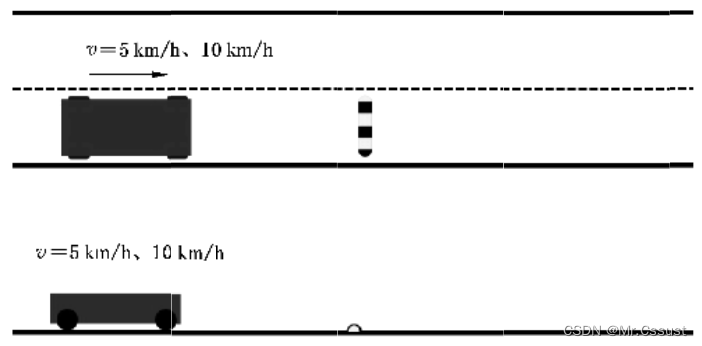
低速线控底盘在非加速工况下,无论空载或负载状态,均应按照指定的方法进行试验,分别以速度(v)为5km/h士1km/h、10km/h±1km/h通过减速丘,低速线控底盘能够匀速通过高度5cm、宽度30cm的减速带。示例如下:
直线行驶稳定性
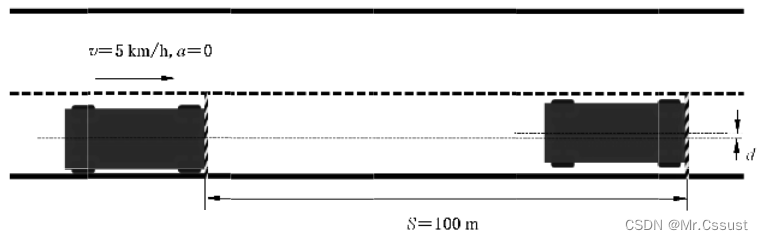
低速线控底盘应按指定的方法进行试验,在空载条件下以速度(v)为5km/h士1km/h,匀速行驶100m,侧问跑偏距离小于2m。示例如下:
环境适应性要求
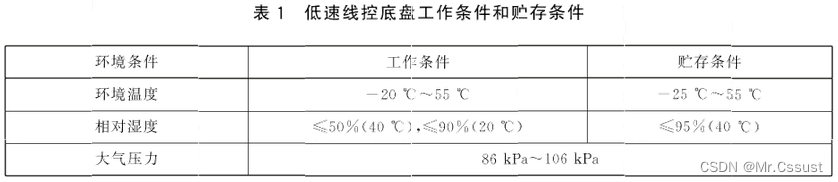
低速线控底盘在表1给出的环境条件下使用、运输和贮存时应保持正常。
需在特殊环境工作的低速线控底盘,其环境条件由用户另行规定。
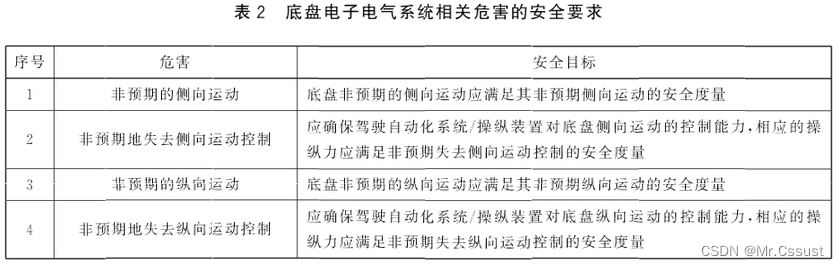
功能安全要求
低速线控底盘各安全相关系统的功能设计应满足以下总体要求。
a)具备相应的文件来说明底盘的功能概念、内外部接口、潜在的失效风险及安全措施,提供功能描述清单。
b)证明底盘设计时已进行安全分析以识别潜在失效来源,并应用于相关领域的工程实践中。
c)为支持验证措施,说明如何对底盘正常运行和失效模式下的工作状态进行检查。
d)定义底盘相关项的范围,明确属于相关项中的系统和要素,并识别与其存在交互关系的外部系统或要素。提供示意图(模块图)说明相关项的架构及内外部接口,在示意图中以序号标明相关项组件、外部接口系统、内外部接口通道,并提供明细清单(包括硬件和软件的版本号),说明各组件、系统和接口的功能。
信息安全要求
低速线控底盘应具备保障电子系统、组件和功能免受网络威胁的技术措施,具备身份验证、数据加密安全管理,确保数据采集、处理、交换等信息不被非法获取和篡改。
低速线控底盘若具备软件升级功能,应保障数据升级的安全性及可靠性。
低速线控底盘应配备,能记录碰撞等特定事故发生时的底盘行驶速度、制动状态等数据的EDR。
故障处理要求
低速线控底盘应能对故障分级处理,至少包含警告、限功率(限速)、停车的功能处理。
低速线控底盘故障修复后,应能支持复位相关的操作以解除行车限制。对于会导致低速线控底盘无法自动行进的故障,如该类故障对底盘控制器影响较小且无法在第一时间修复时,应提供对应的故障旁路功能,以便对其进行临时性维护和挪车处理。
通信接口
通信接口,低速线控底盘应配置开放的API接口和CAN通信接口。
通信协议,低速线控底盘应配置,与驾驶自动化系统或其他操纵装置通信的,标准化协议与接口,支持CAN2.0A和CAN2.0B通信协议。
通信协议内容,低速线控底盘通信协议应能确保底盘与驾驶自动化系统或其他操纵装置实现通信,低速线控底盘通信协议应至少定义以下信息:
a)基本信息:挡位、荷电状态(SOC)、故障信息、车速、轮速、纵向加速度(如配备),侧向加速度(如配备)、横摆角速度(如配备)胎压、里程;
b)底盘运行状态:就绪或者未就绪状态;
c)控制模式:遥控、自动驾驶、无控制;
d)自动驾驶接管请求信息;
e)驱动信息:电机转速、电机扭矩;
f)制动信息:制动扭矩或制动压力、开度指令、反馈的制动扭矩或制动压力、制动开度实际值、驻车指令、驻车状态值、冗余制动状态(如配备);
g)转向信息:目标转向角度、当前转向角度、轮端转角(如配备)、转向扭矩值、电机转速、电机电流、转向系统故障状态。
在线升级(OTA)
如果低速线控底盘具备OTA功能,应在非工作状态下支持后台OTA。进行OTA时低速线控底盘端和云端服务器之间应采用双向认证机制,升级包的数据传输应采取加密措施,在升级不成功的情况下,应自动回溯到前一版本。OTA过程,在云端应有详细的日志记录,在低速线控底盘端应有详细的版本信息。
线控驱动
动力性能
低速线控底盘动力性能应满足以下要求:
a)最高车速按照GB/T18385规定的试验方法,进行30min最高车速试验。低速线控底盘速度符合30min最高车速估计值士5%的要求,如果试验中低速线控底盘速度达不到30min最高车速估计值的95%,试验重做;
b)低速线控底盘加速性能应满足应用场景的需求;
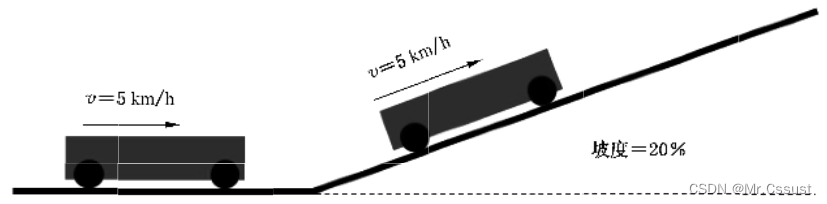
低速线控底盘驱动系统爬坡能力应满足以下要求:
a)满载时,其爬坡度应不小于20%,以速度5km/h爬坡过程中,车辆不发生停车或者后溜现象;
b)满载时,满足20%坡道起步功能。
驱动控制响应能力
低速线控底盘驱动系统响应能力应满足以下要求:
a)当使用油门控制方式时,0%~100%油门开度阶跃响应时间不大于100ms,最大超调量不大于10%,稳态误差不大于5%;
b)当使用扭矩控制方式时,扭矩阶跃响应时间不大于200ms,最大超调量不大于10%,稳态误差不大于5%;
c)当使用加速度控制方式时,加速度阶跃响应时间不大于250ms,最大超调量不大于10%,稳态误差不大于5%;
d)当使用速度控制方式时,速度阶跃响应时间不大于300ms,最大超调量不大于10%或1km/h,稳态误差不大于5%或0.5km/h。
线控制动
低速线控底盘应具备满足性能要求的行车制动系统和驻车制动系统,低速线控底盘制动时应不发生跑偏、侧滑以及失去转向。
行车制动
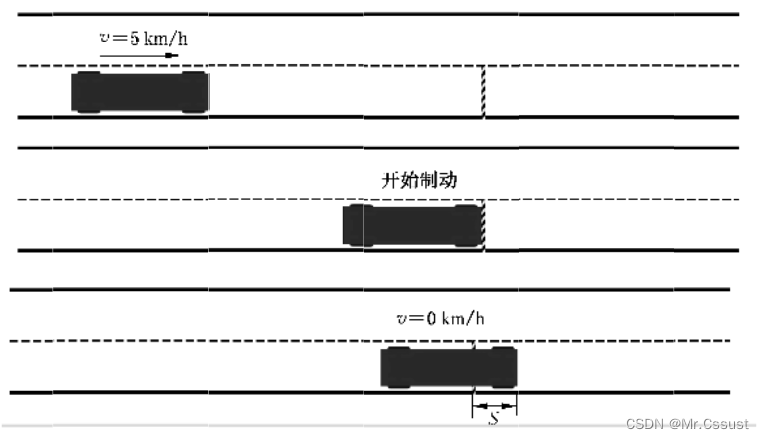
低速线控底盘在符合规定的条件下,按照指定试验方法进行行车制动道路试验,其性能应满足公式(1)的要求:

式中:S为制动距离,单位为米(m);v0为制动初始速度,单位为千米每小时(km/h)。
被测低速线控底盘分别以速度(v)为5km/h±1km/h、10km/h士1 km/h、15 km/h±1 km/h.20 km/h+1 km/h、25 km/h士1km/h匀速直线运动一段路程,到达制动线按下急停装置,测量制动线到被测低速线控底盘停车线之间的距离S,示例如下:
制动响应能力
低速线控底盘制动响应能力应满足以下要求:
a)当使用制动压力控制方式时,制动阶跃响应时间不大于200ms,超调量不大于士0.3MPa或士10%:
b)当使用减速度控制方式时,减速度控制阶跃响应时间不大于250ms,超调量不大于士0.5 m/s或士10%。
线控转向
总体要求
低速线控底盘转向系统应满足以下要求:
a)支持转角闭环或位置闭环控制功能;
b)在平坦、干燥和清洁的道路上正常行驶,如没有转向指令时转向系统不发生轻飘、摆振、抖动及跑偏现象;
c)左转车轮最大转角与右转车轮最大转角的对称性大干95%;
d)提供转向机构转角信号或位置信号、转向电机转速信号;
e)具备转向系统异常检测机制,在检测到转向系统故障时在100ms内执行安全措施,并能够上报对应的故障码;
f)设计时使低速线控底盘自身具有一些弱的不足转向性,以提高行驶安全性。
线控转向响应能力
低速线控底盘线控转向系统响应能力应满足以下要求:
a)轮端角度响应分辨率不大于0.3°;
b)转向系统响应时间不大于200ms;
c)整车空载静止状态下,当轮端目标角度从0°转向到士25°时,在目标转角20%~80%区域内转向角速度不低于15(°)/s,最大超调量不大于1°,稳态误差不大于 0.6°。
参考资料
GB/T 43947-2024 低速线控底盘通用技术要求