文章目录
- 案例要求
- 创建地图
- rviz仿真
- 保存地图
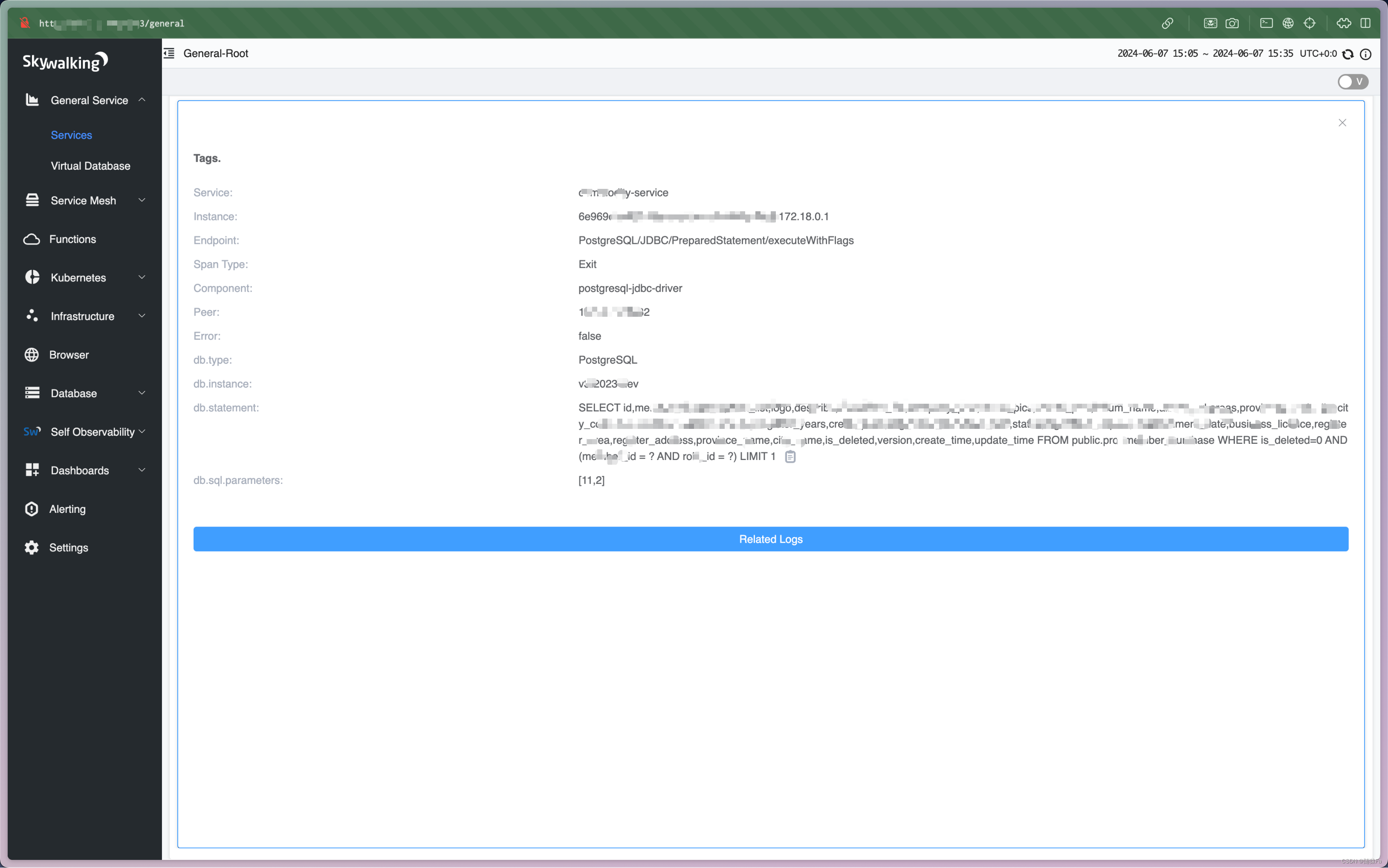
- 坐标点定位
- 识别训练
- 主逻辑理解
- 语音播报
- 模块匹配
- 二维码识别
- 多点导航
- 讲解视频
- 其余篇章
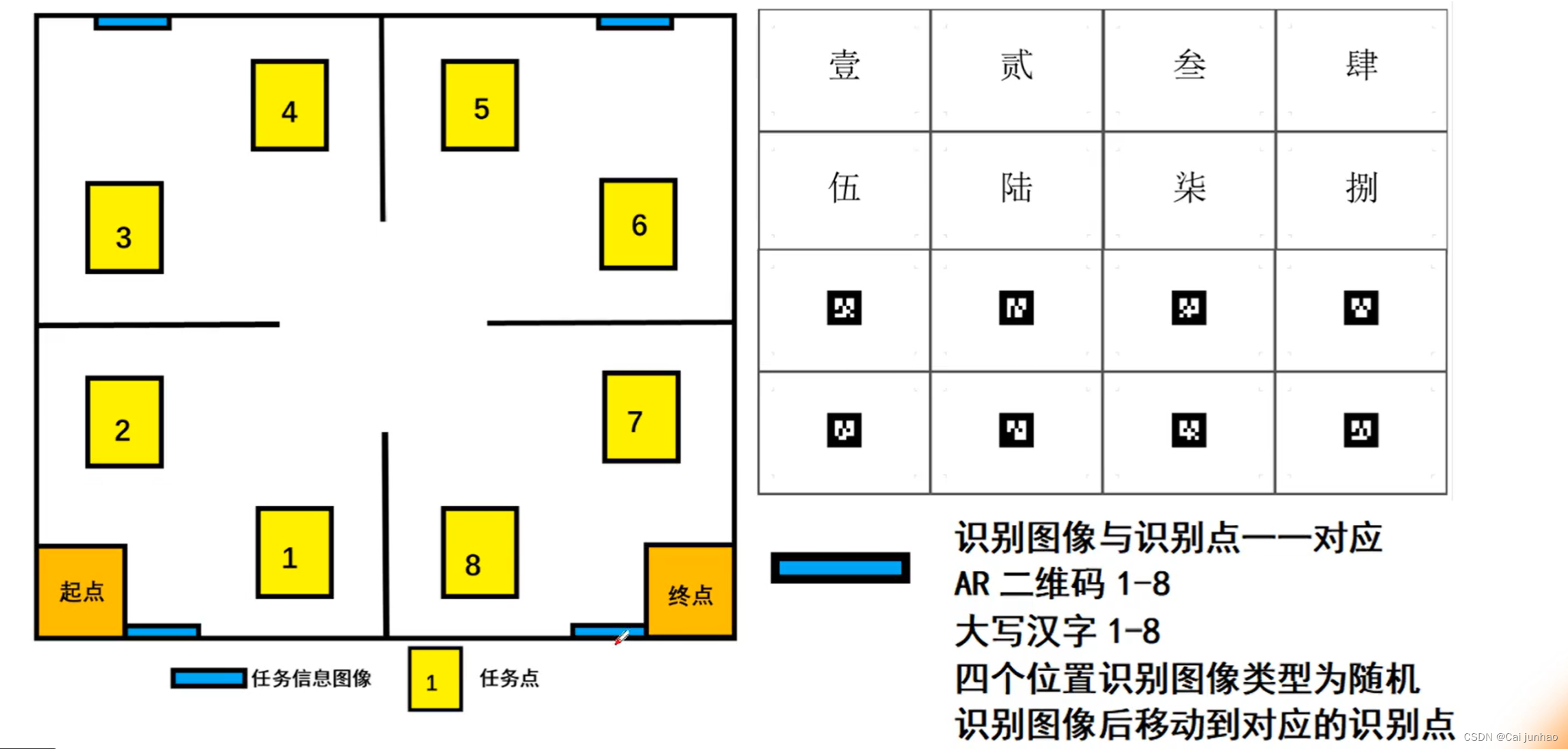
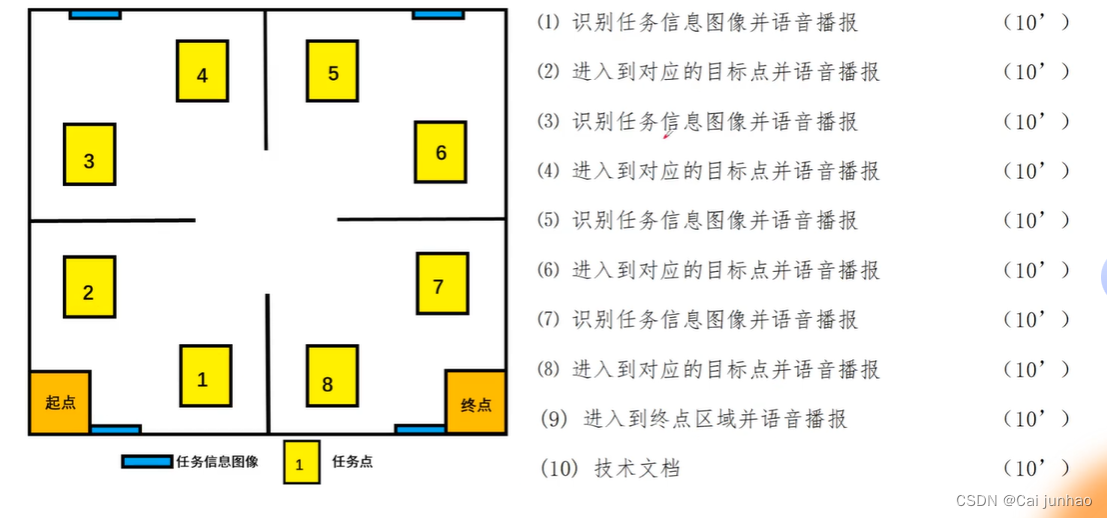
案例要求
创建地图
./1-gmapping.sh
把多个launch文件融合在sh文件里面
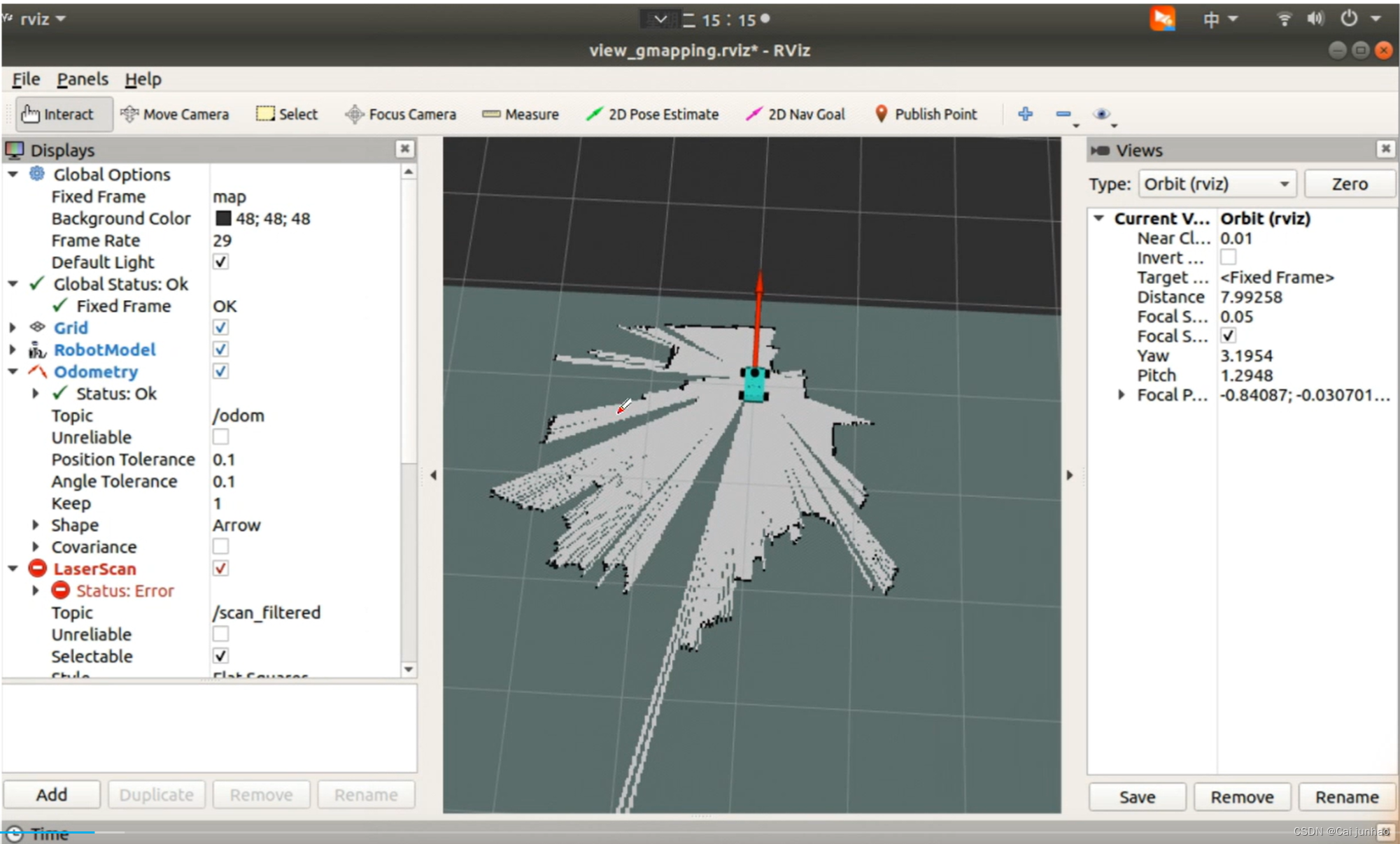
rviz仿真
rviz是rose集成的可视化界面,查看机器人的各项数据,
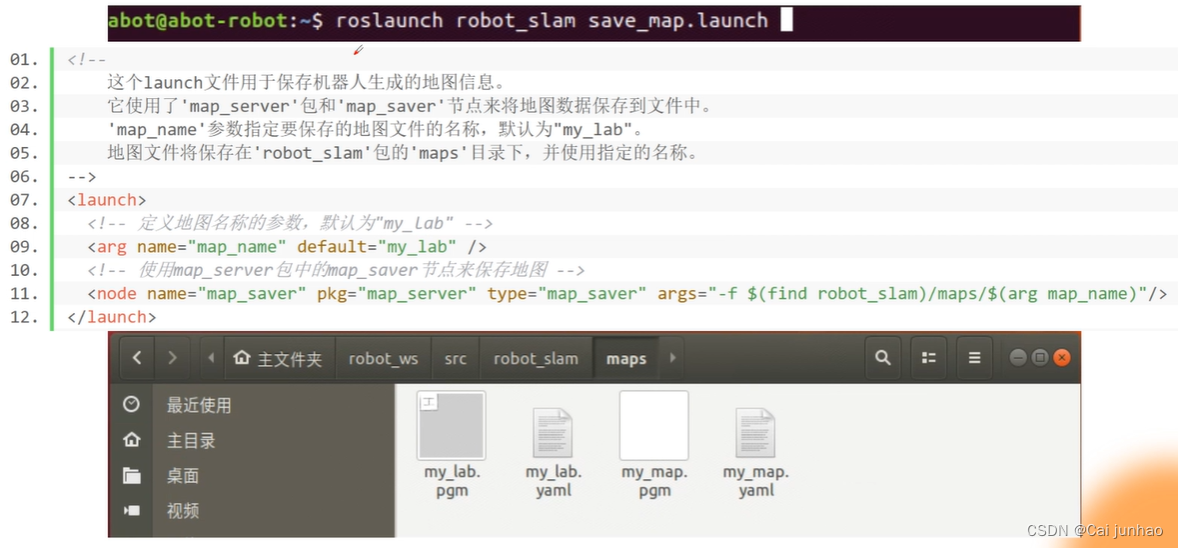
保存地图
roslaunch robot_slam save_map.launch
坐标点定位
要让机器人移动到对应位置,给予坐标信息(X,Y,偏转角度),信息保存于multi_goal.launch
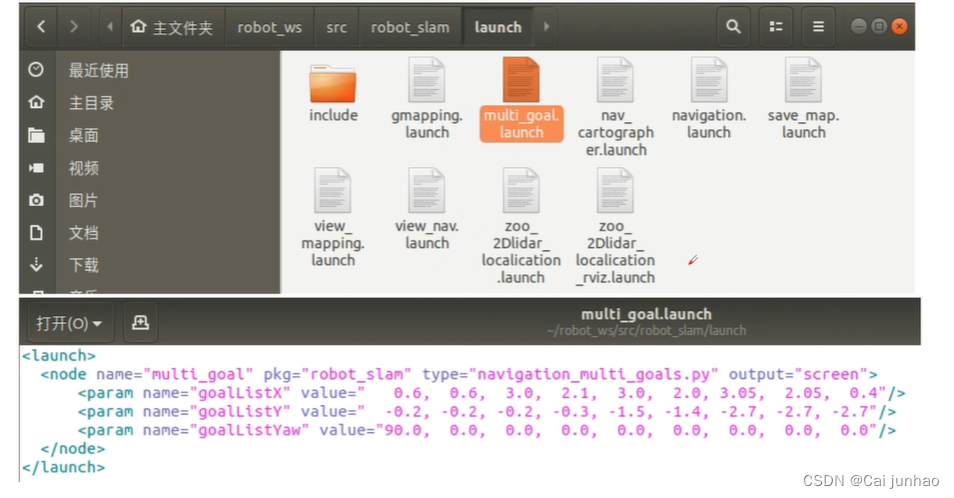
建图位置和起点位置要重合
小车的坐标系:X轴朝左,单位m;Y轴朝上,单位m;偏转角度逆时针为正,单位°
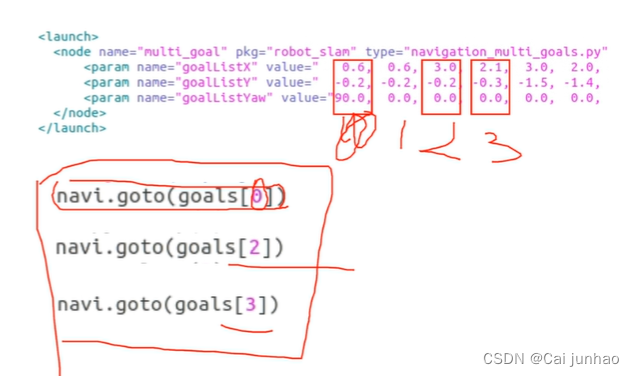
调用坐标点的命令:
navi.goto(goals[第几个坐标])
识别训练
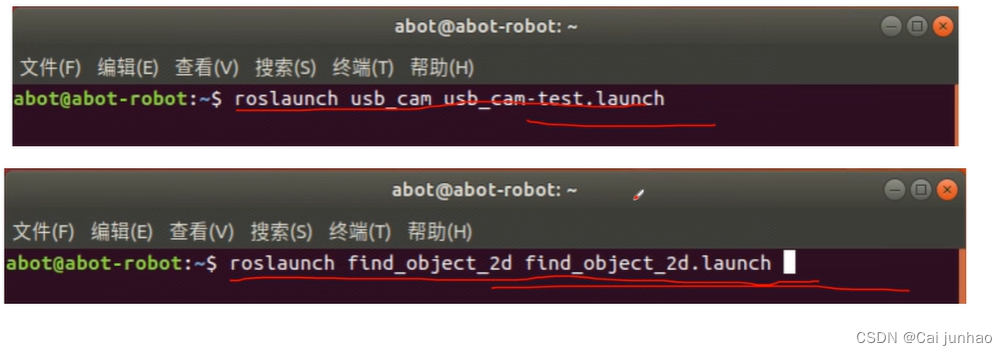
分别打开两个终端启动两个launch文件
启动摄像头:
roslaunch usb_cam usb_cam-test.launch
启动识别文件:
rolaunch find_object_2d find_object_2d.launch
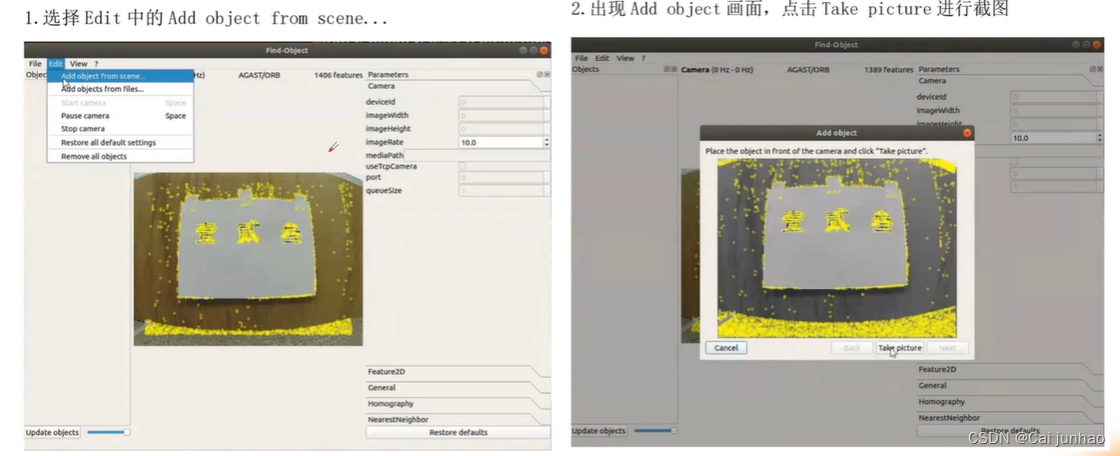
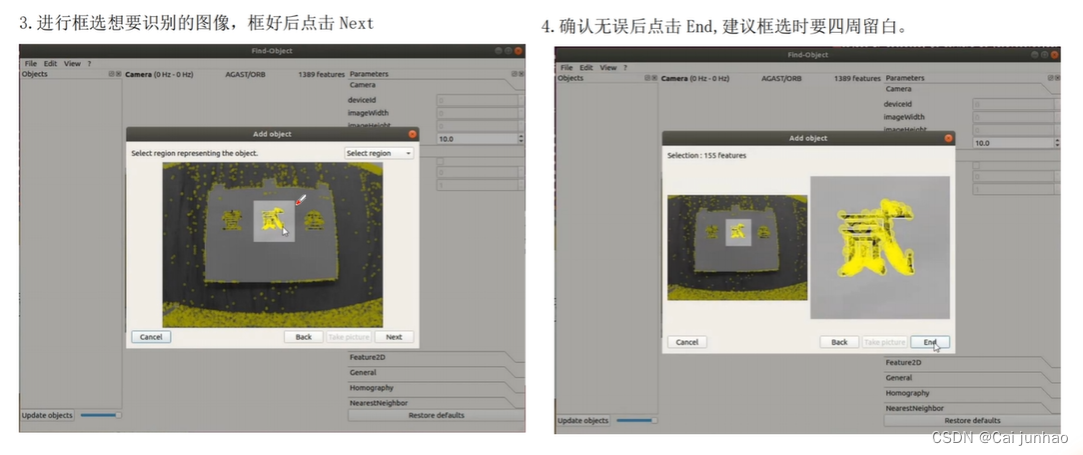
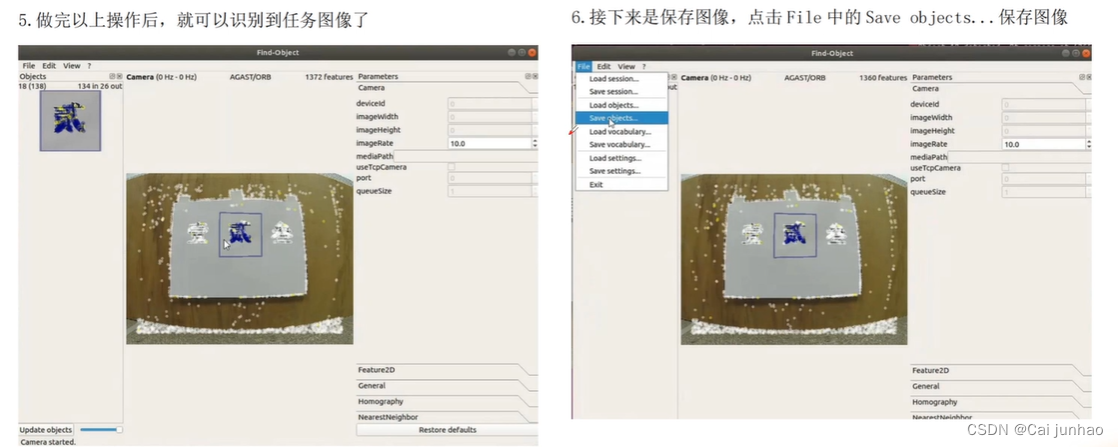
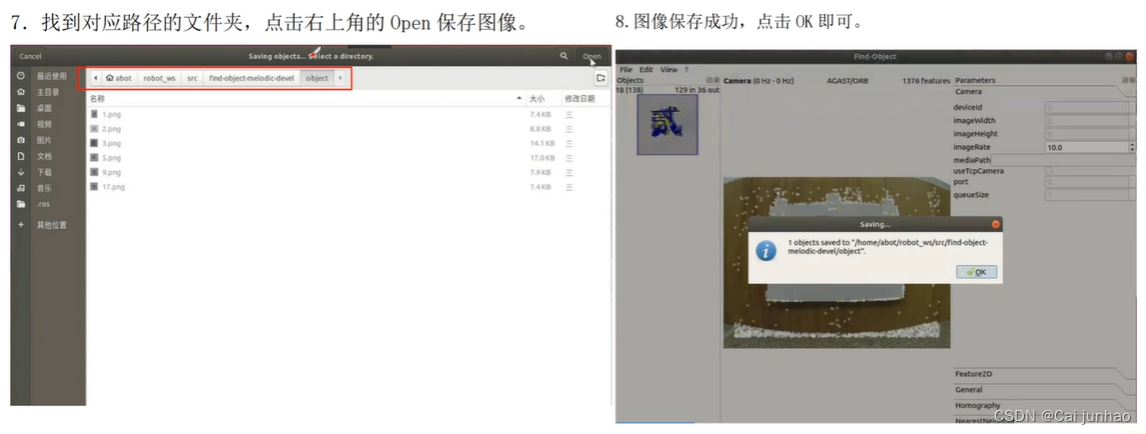
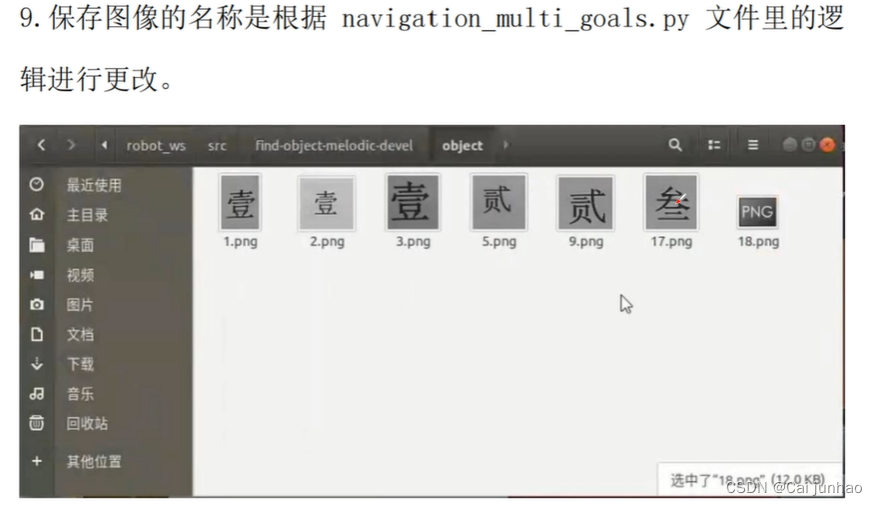
手动给图像做分类,z表示是命名名称
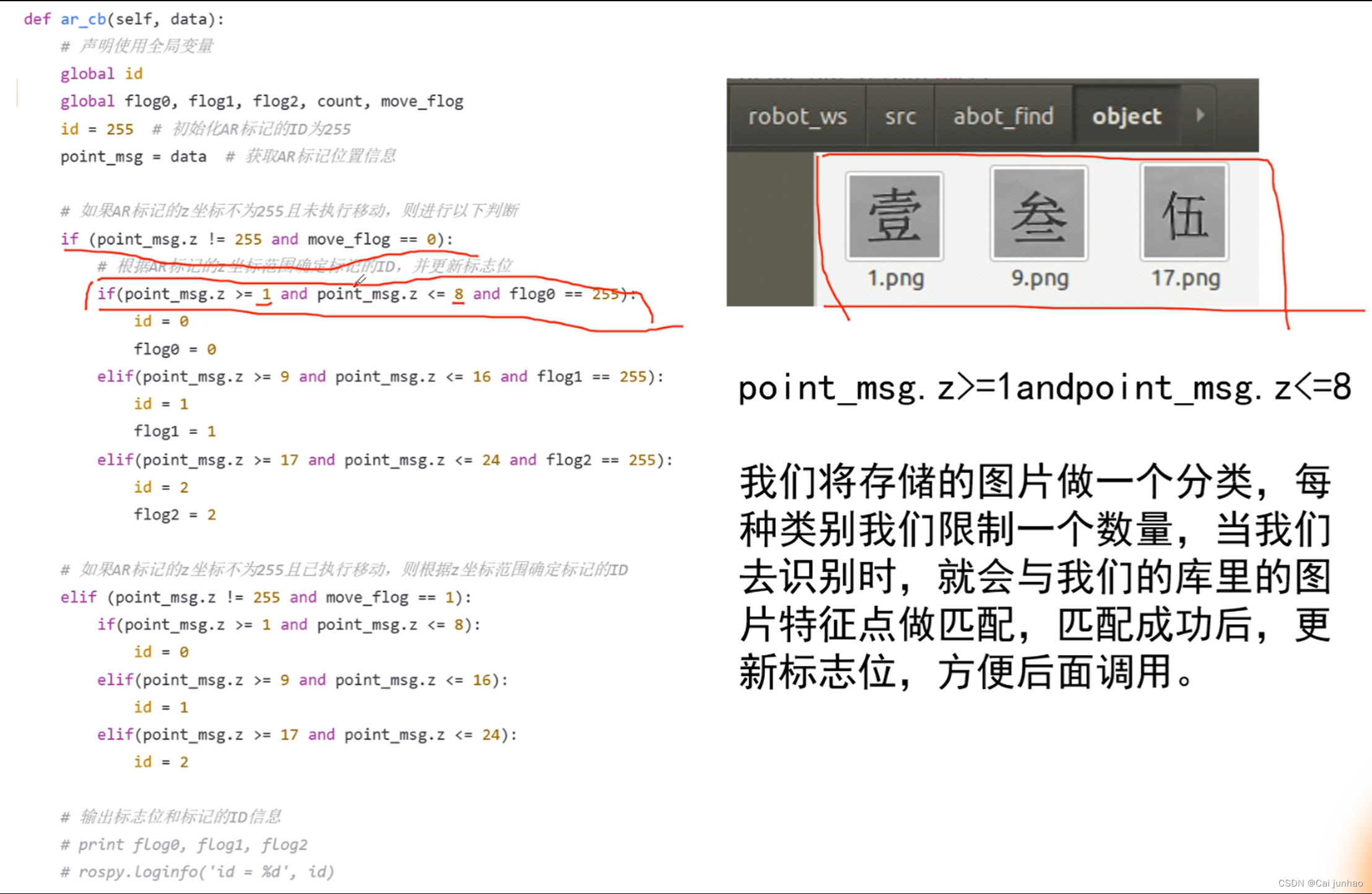
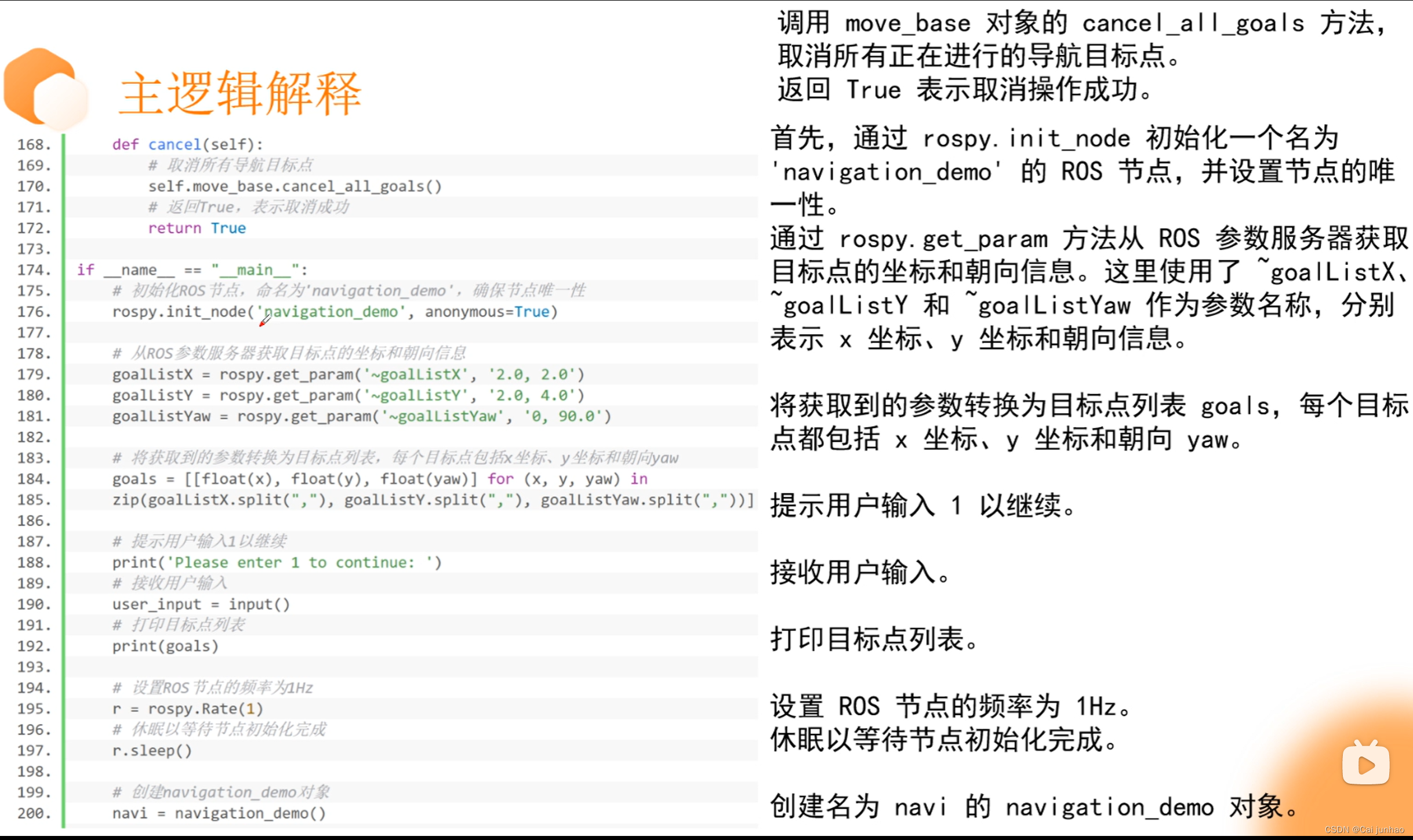
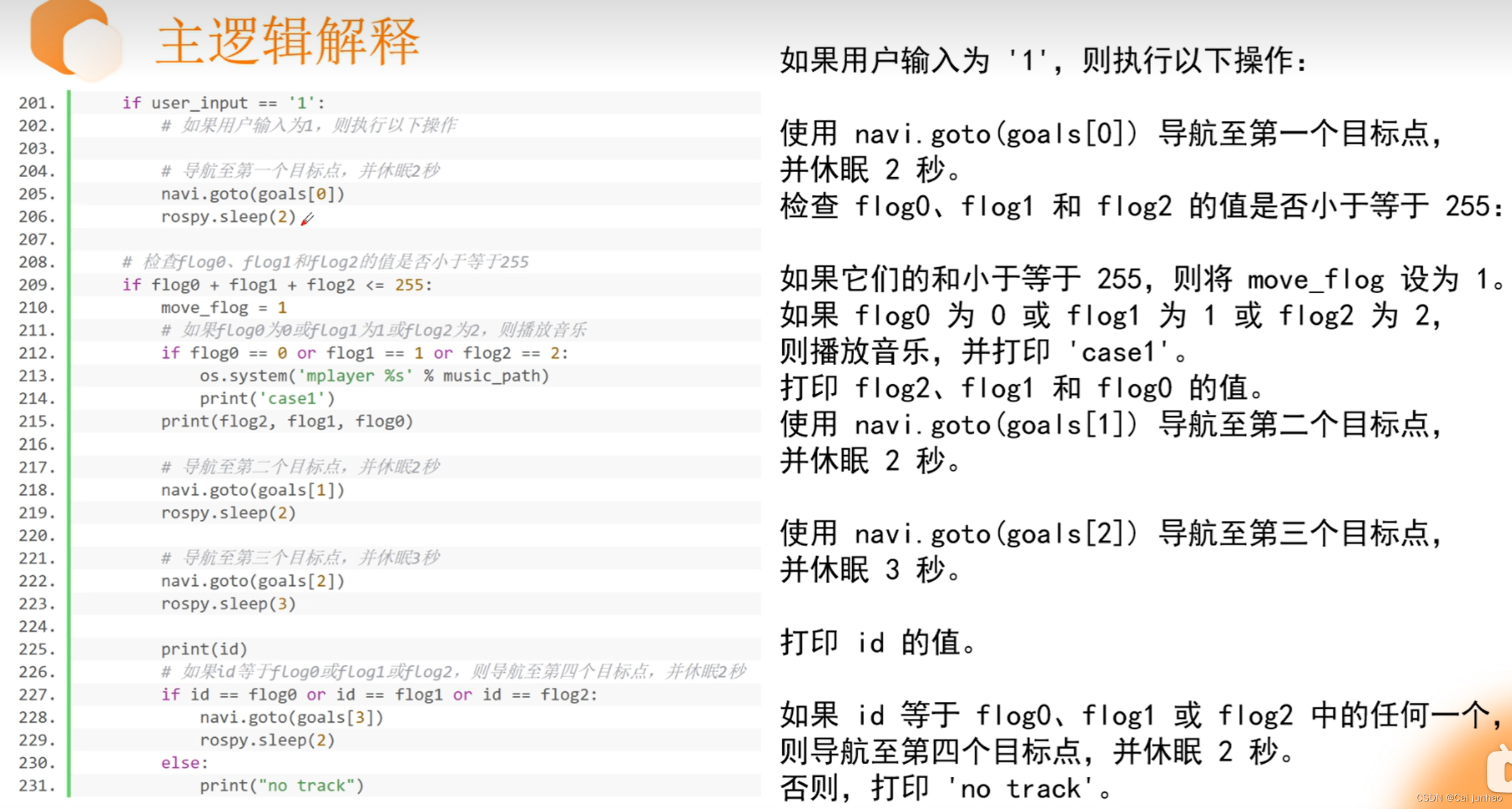
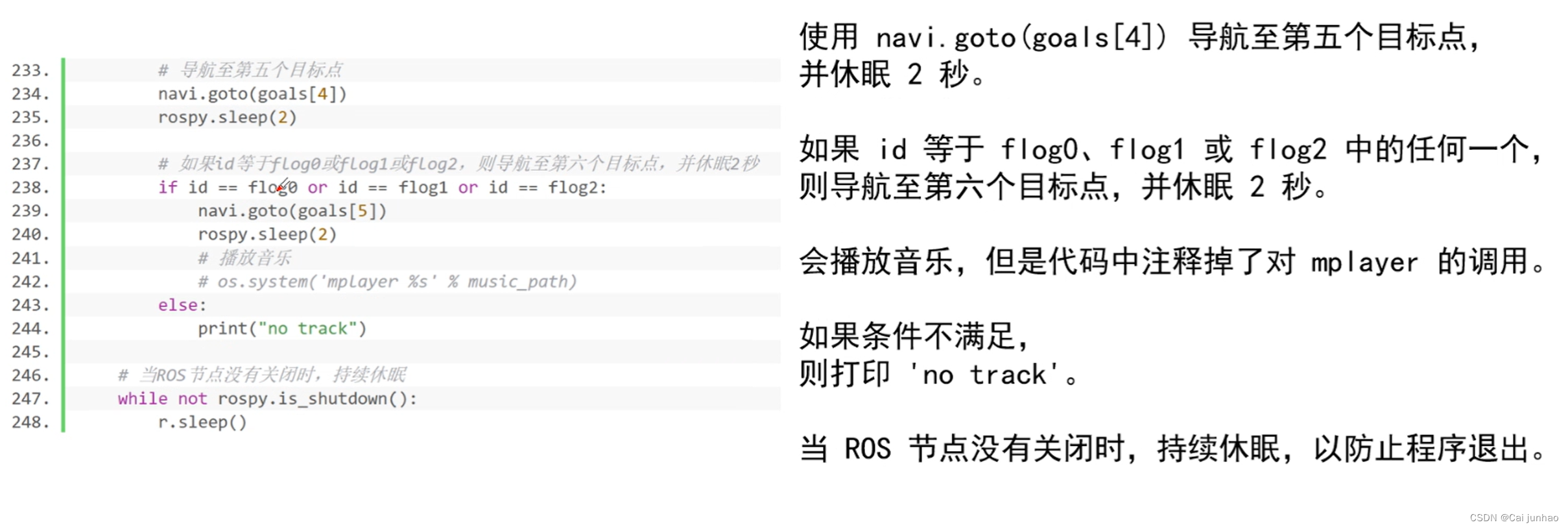
主逻辑理解
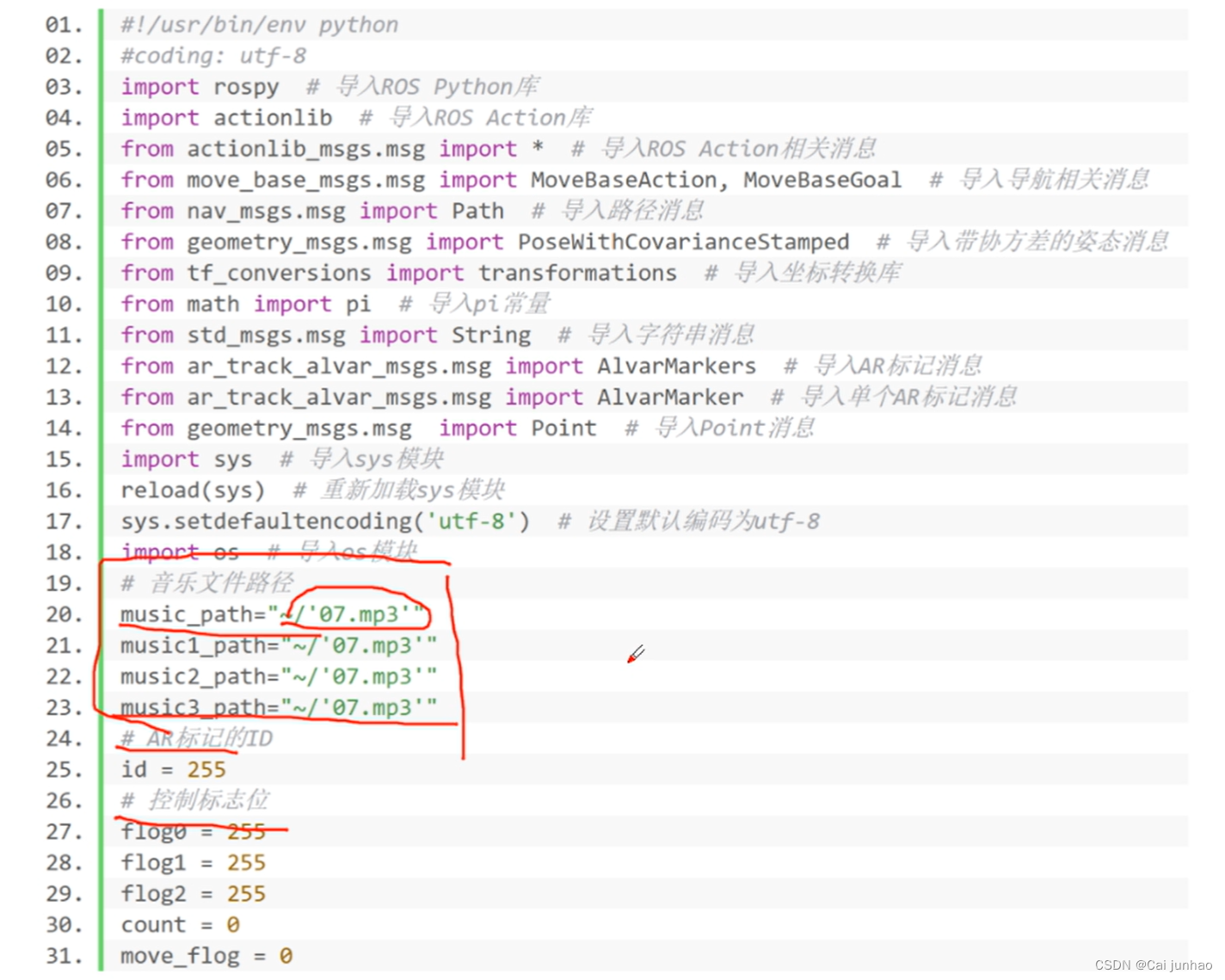
代码是
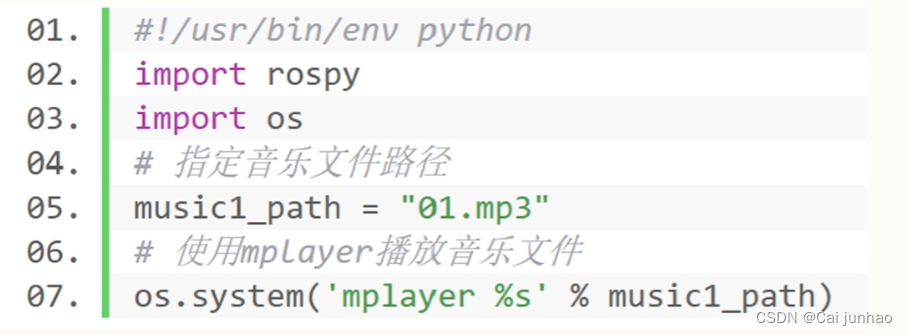
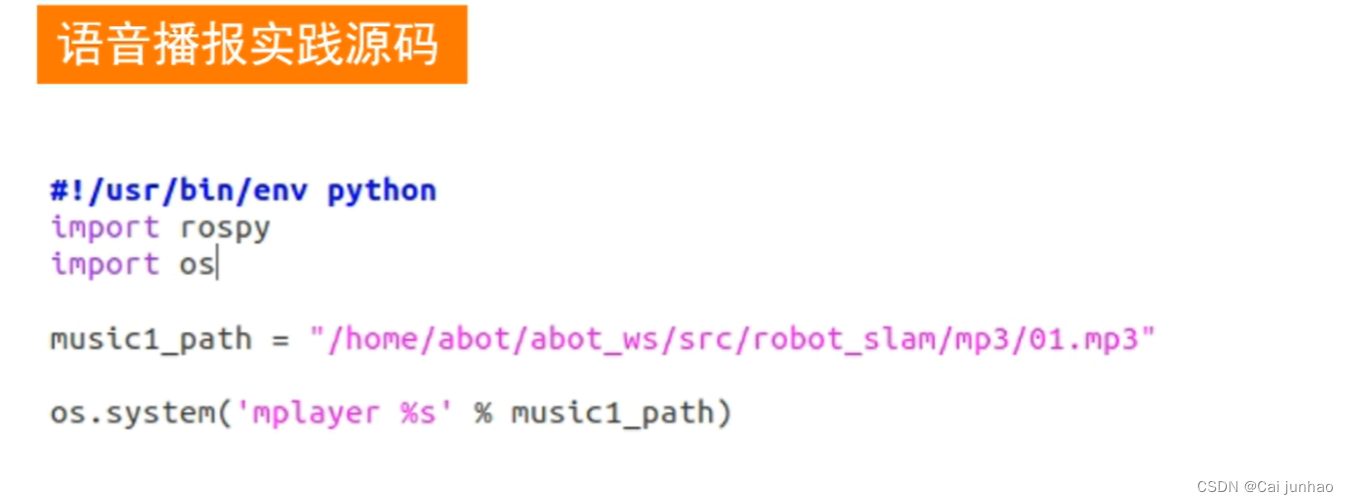
语音播报
使用os.system('mplayer %s' % music1_path)这行代码,通过系统调用来执行mplayer命令并播放指定的音乐文件。music_path指定了要播放的音乐文件路径
查看当前路径:pwd
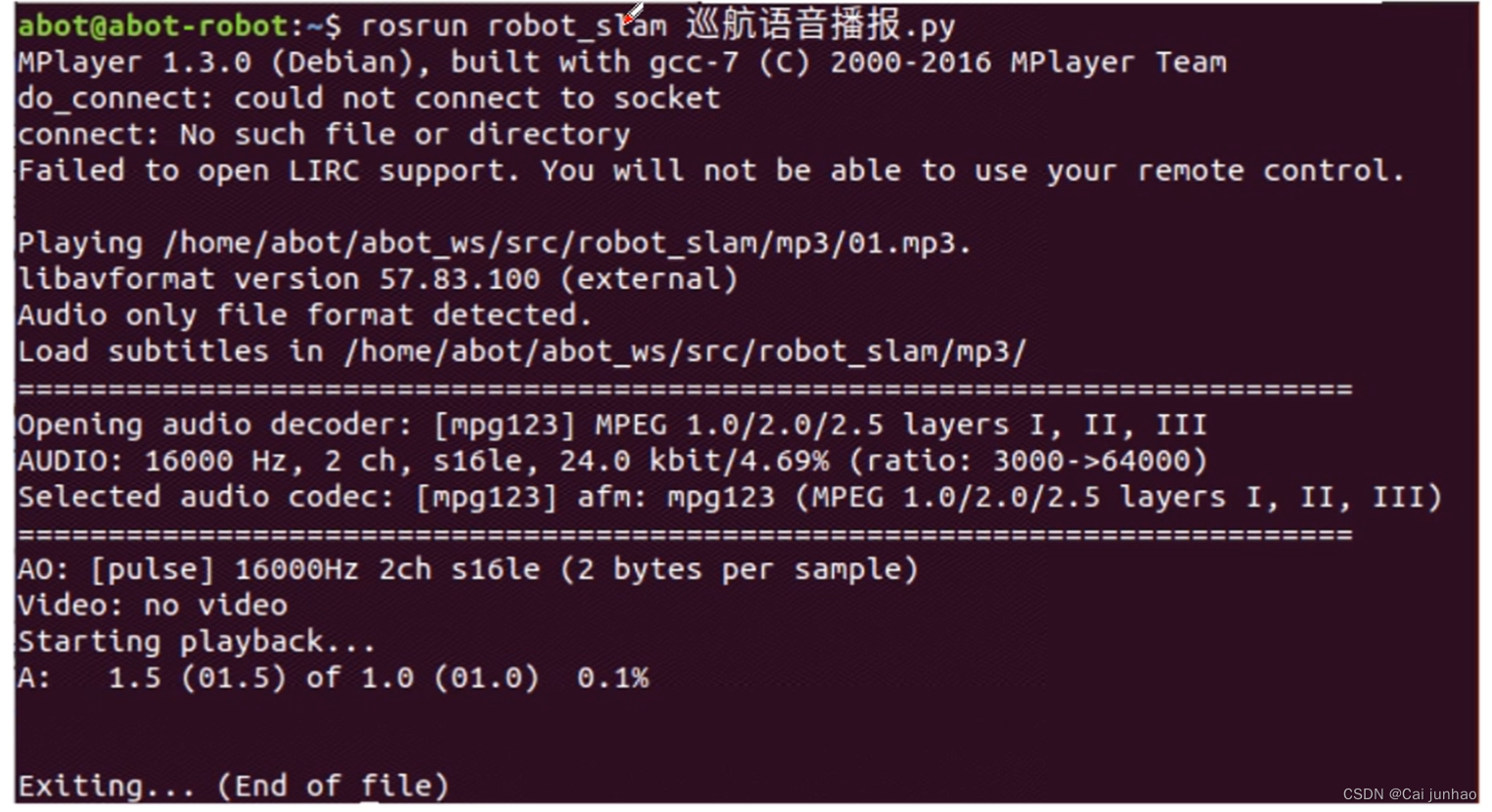
语音播放识别成功:
没有听到声音:查看扬声器信道
没有运行成功:查看代码格式
可以用TTS文本转语音
模块匹配
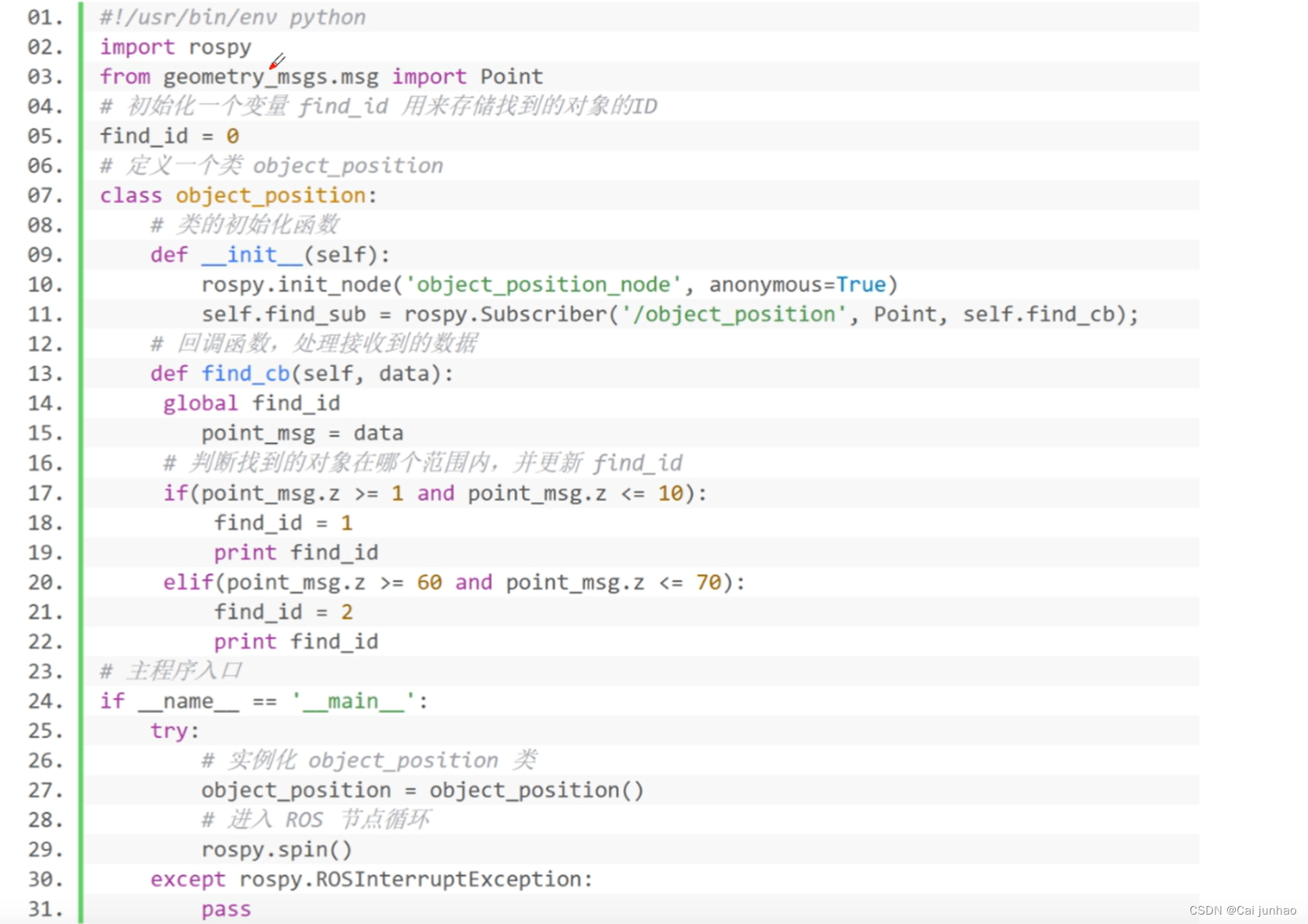
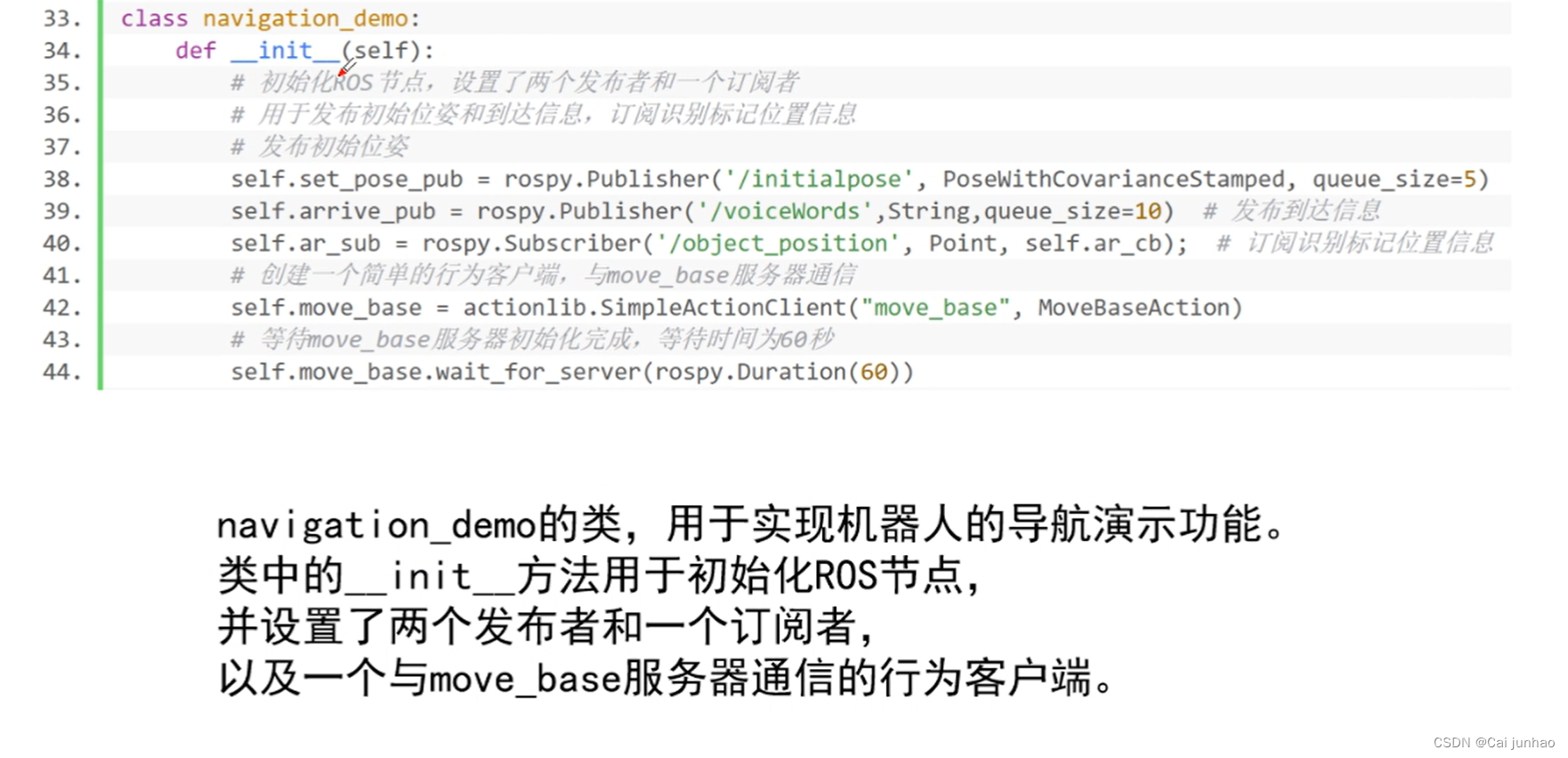
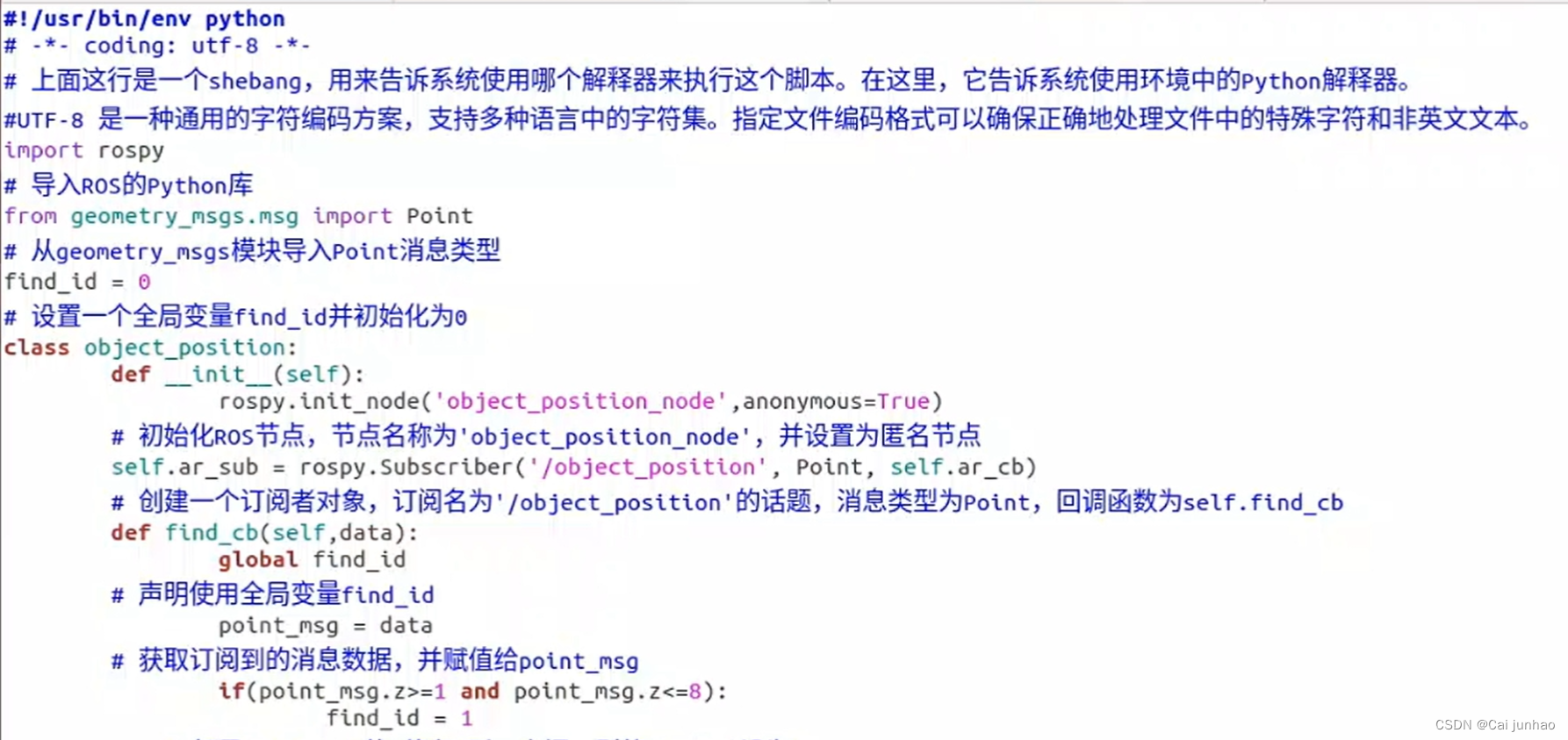
self.find_sub = rospy.Subscriber('/object_position',Point,self.find_cb);
创建了一个订阅者(Subscriber),用于接受名为/object.position的话题发布的geometry_msgs.msg.Point类型的消息,并将其传递给self.find_cb方法进行处理。
rospy.Subscriber:创建一个订阅者对象
'/object_position:指令要订阅的话题名称
Point:指令要订阅的消息类型,即geometry_msgs.msg.Point
'self.find_cb’是回调函数,当从/object_position话题接受到消息是,该函数将调用来处理接收到的消息
通过这行代码,节点将订阅/object_position话题,一旦有新的geometry_msgs.msg.Point类型的消息发布到该话题上,self.find_cb将会被调用来处理接收到的消息数据
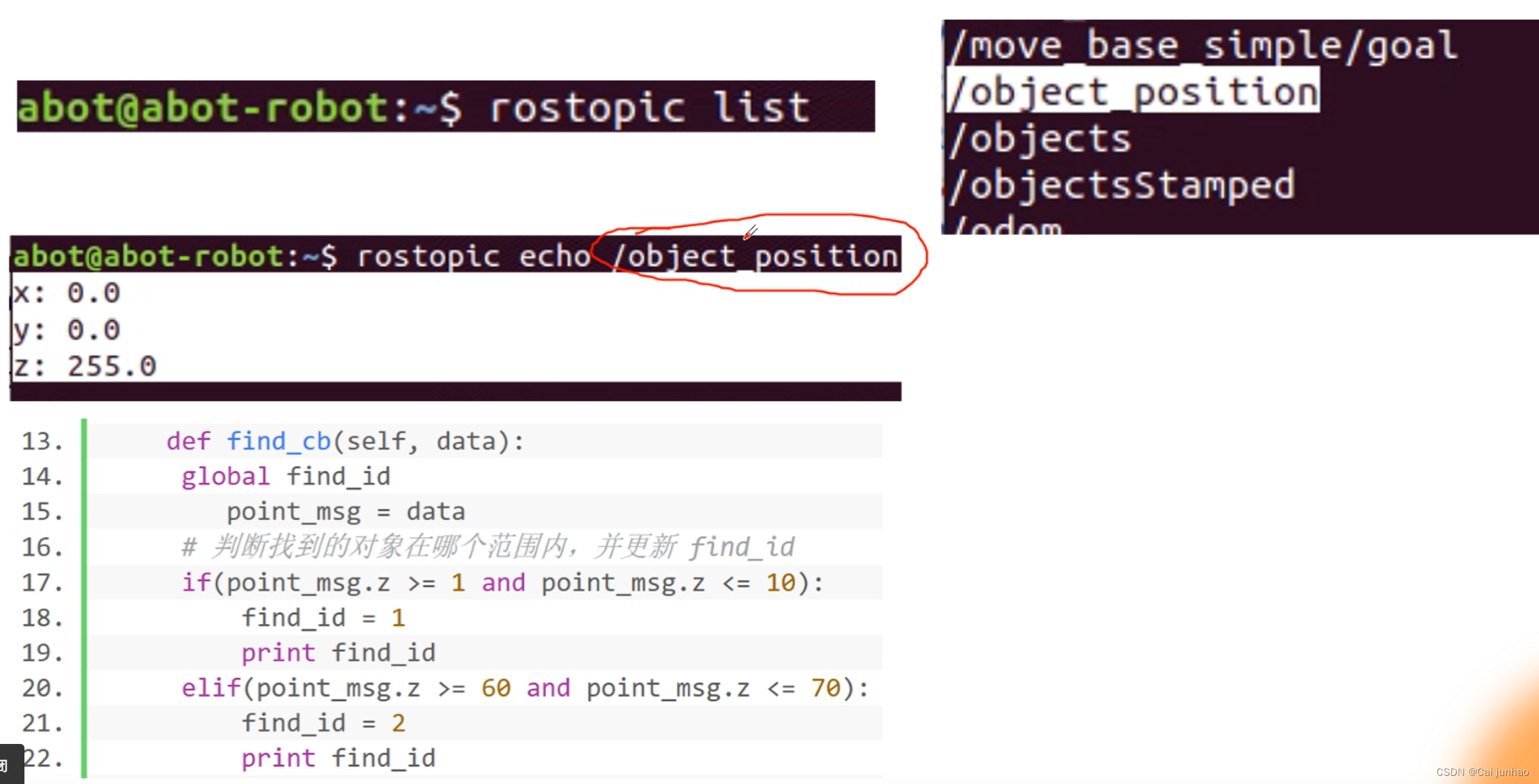
列出当前系统中所有已发布和已订阅的话题:
rostopic list
查看名为 /object_position的话题上的消息:
rostopic echo /object_position
启动摄像头和识别软件:
roslaunch usb_cam-test.launch
roslaunch find_object_2d find_object_2d.launch
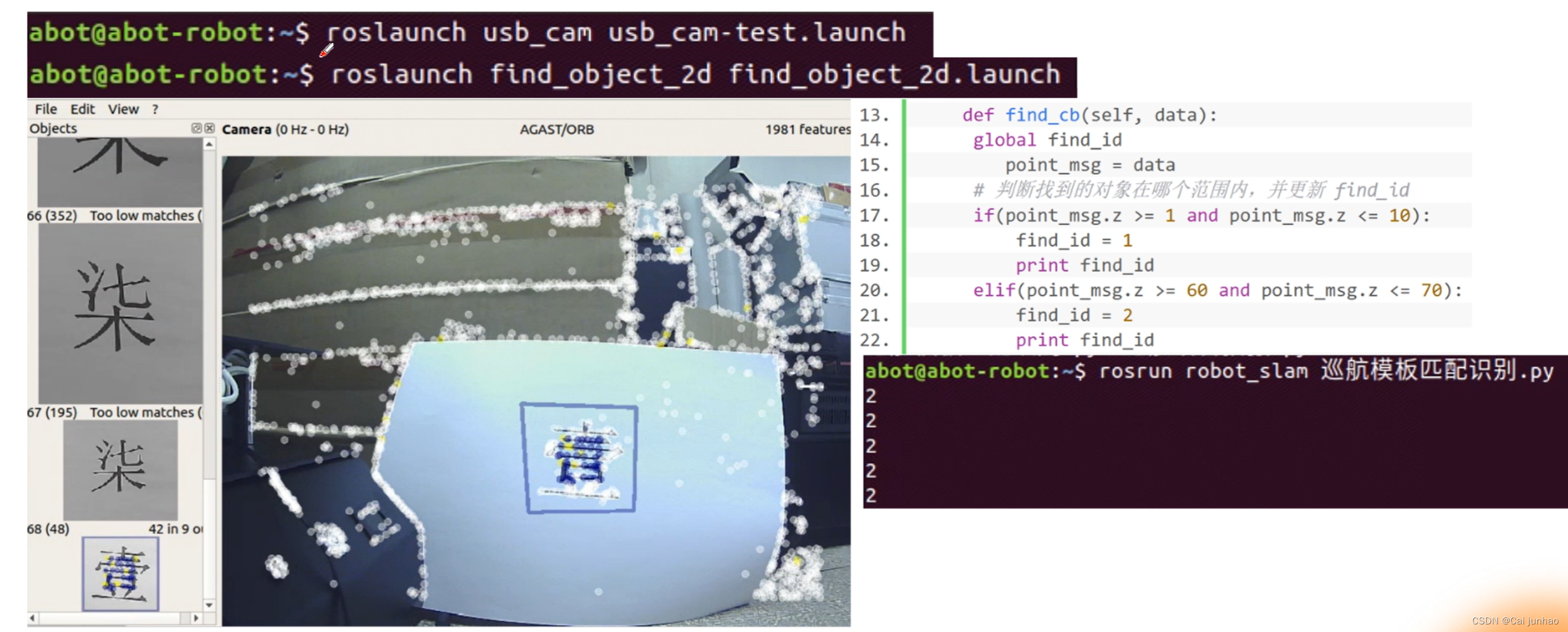
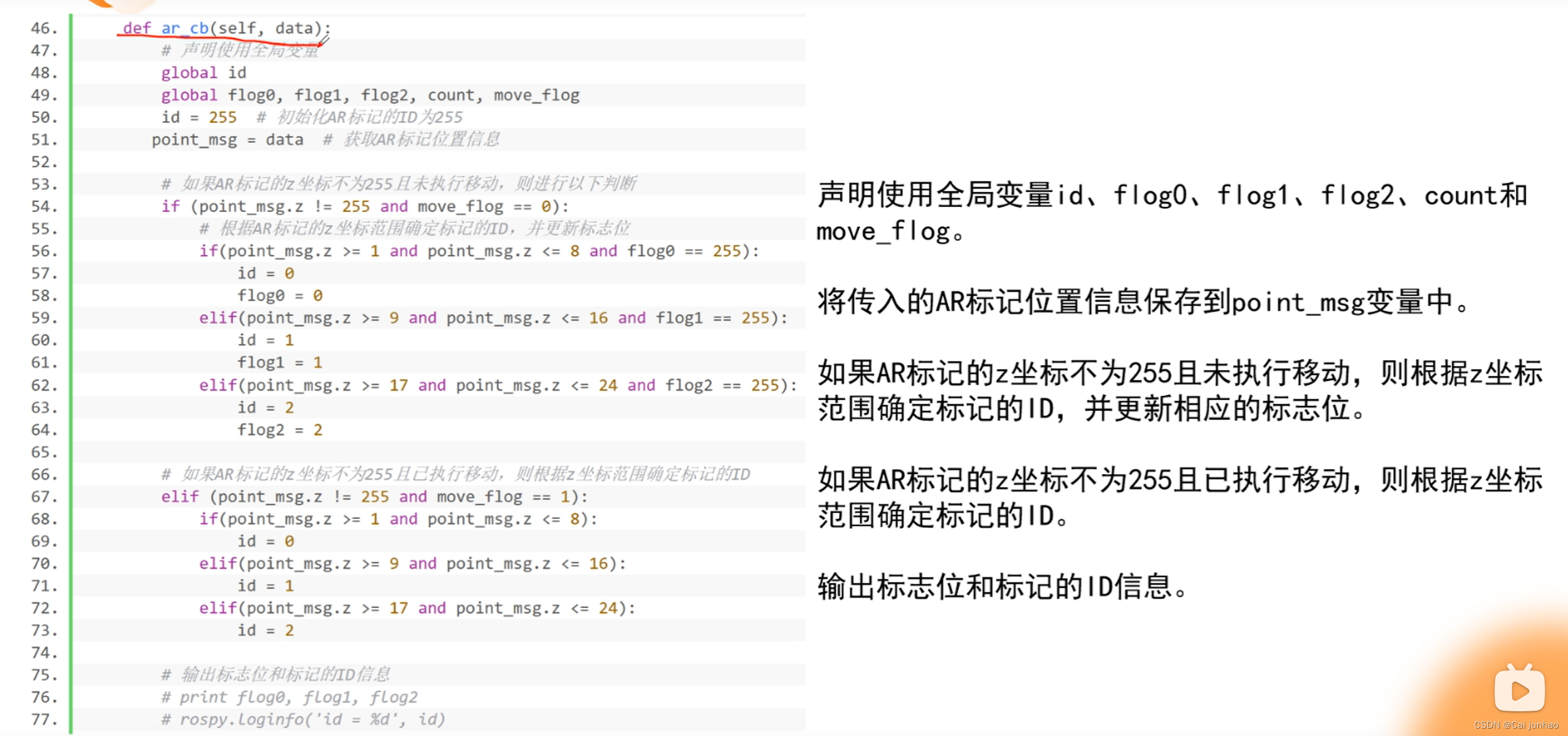
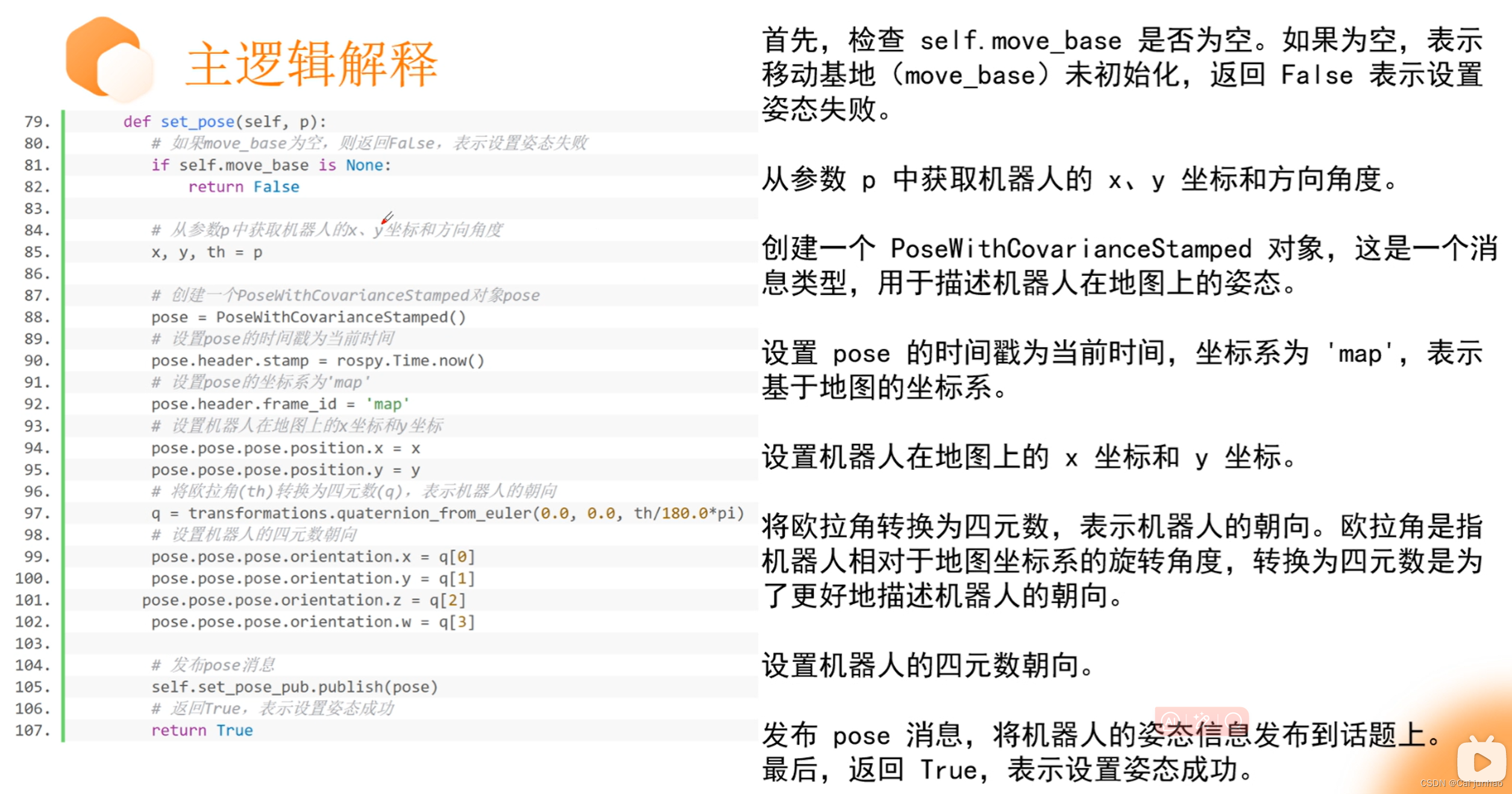
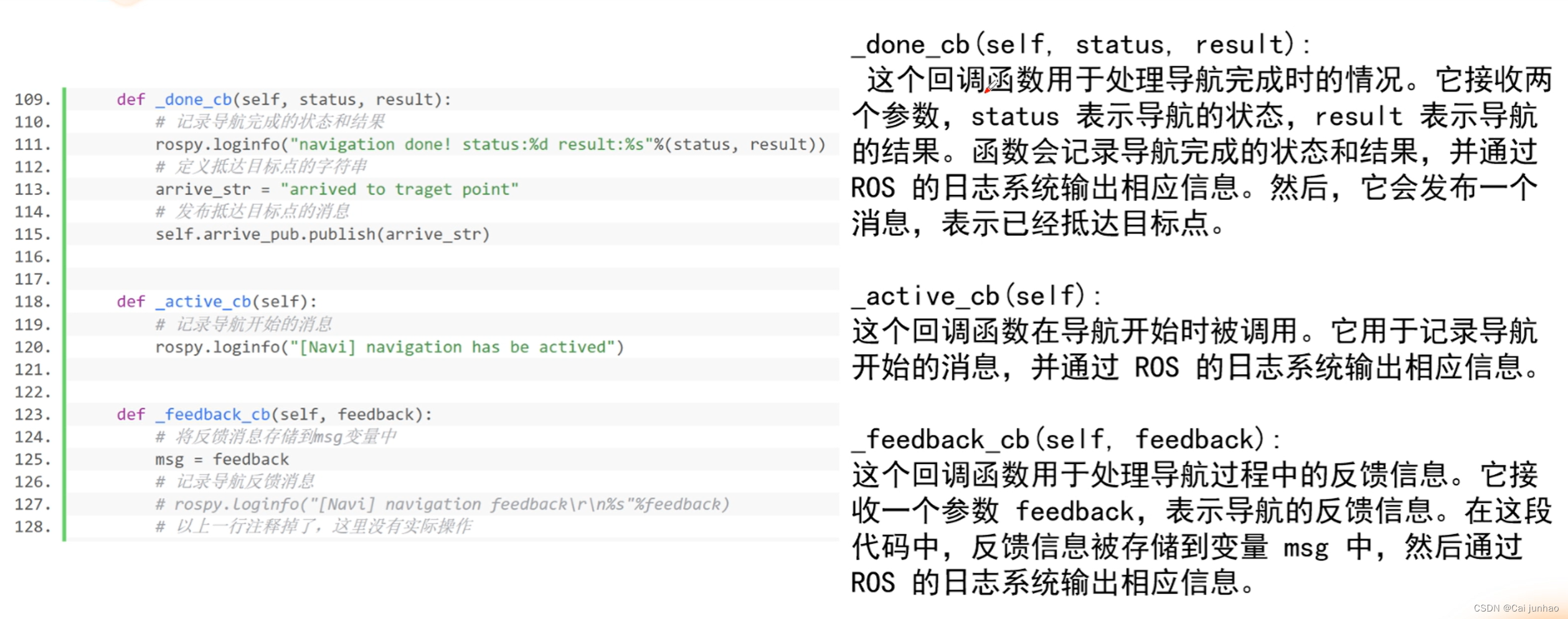
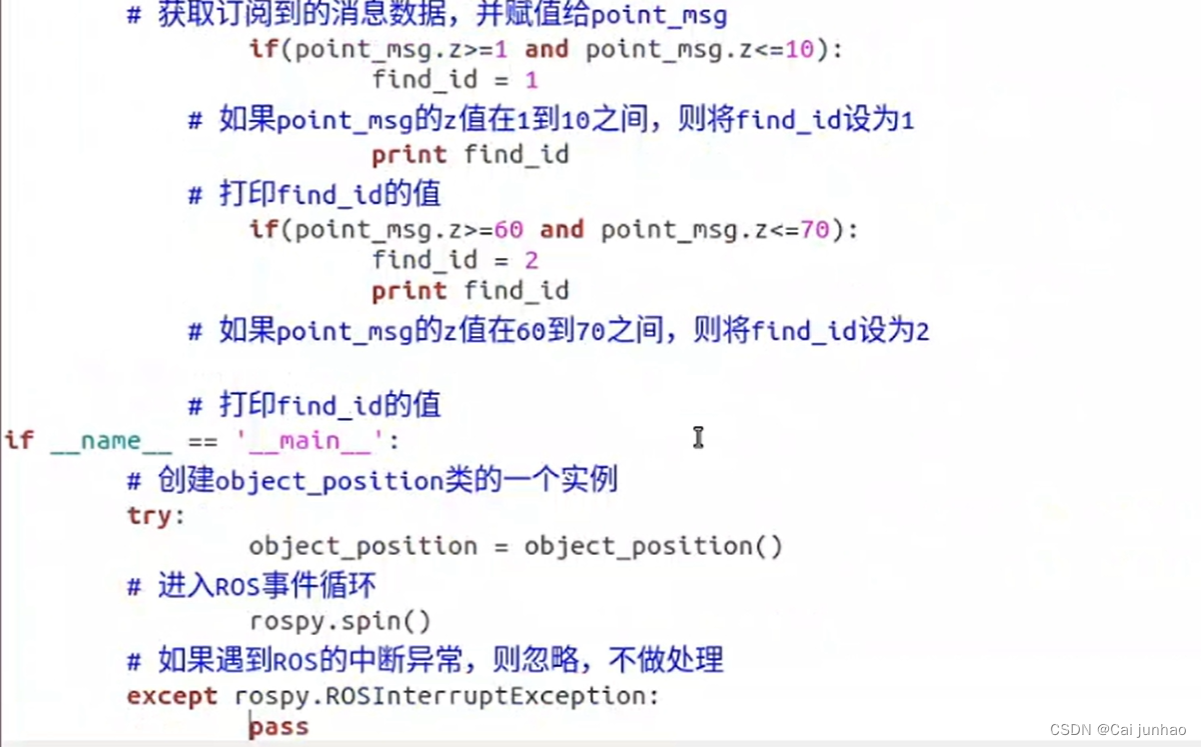
代码具体含义:
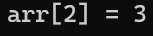
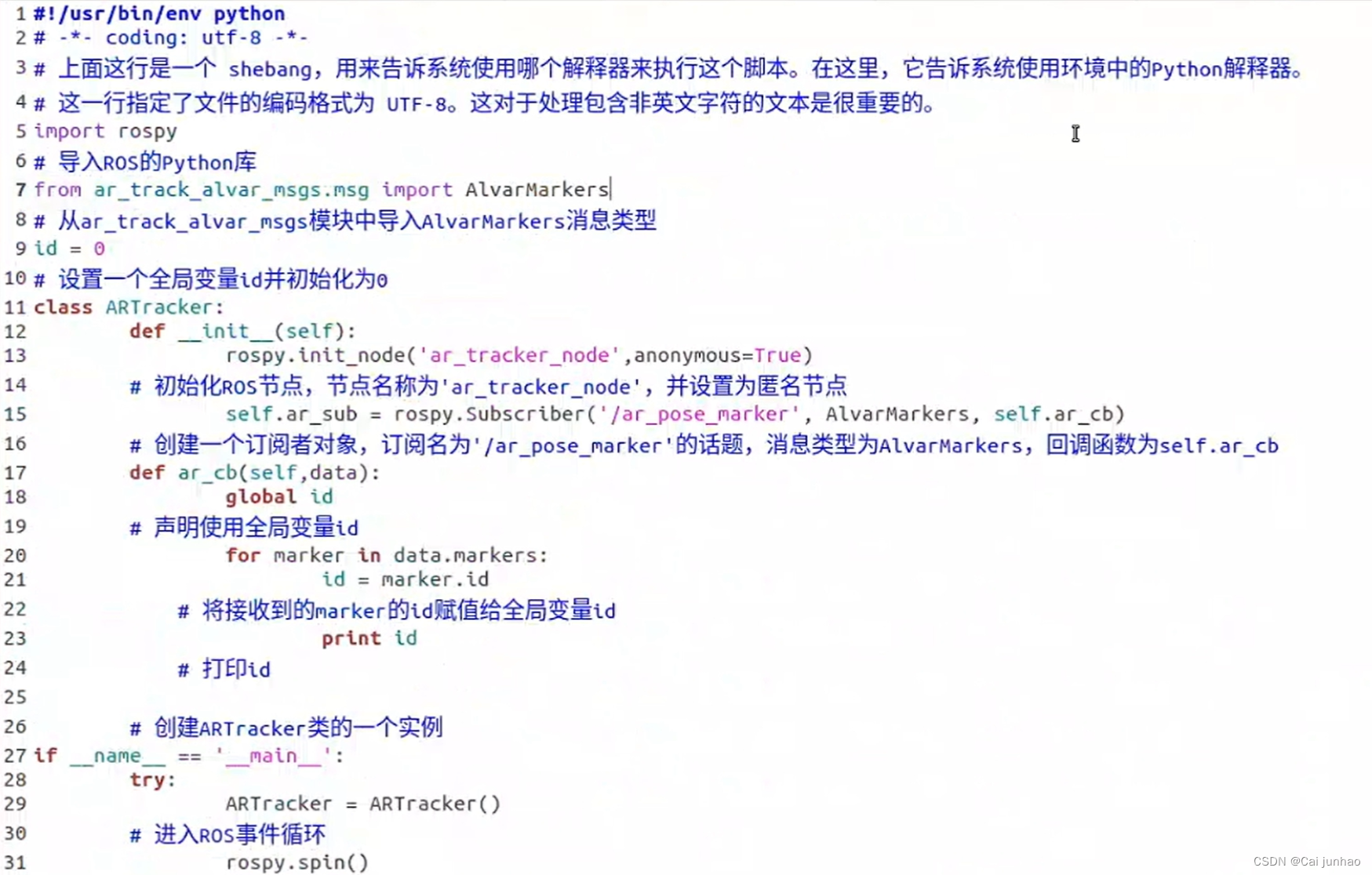
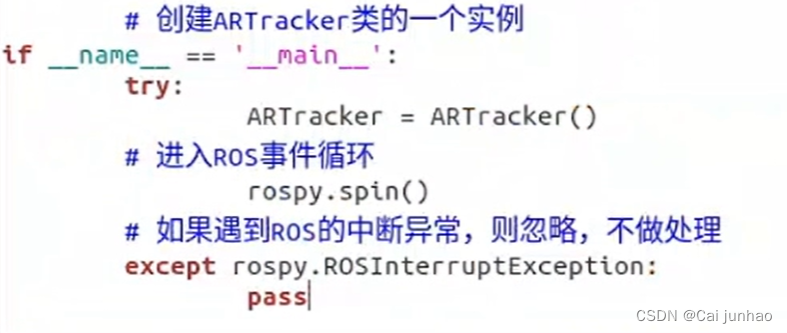
二维码识别
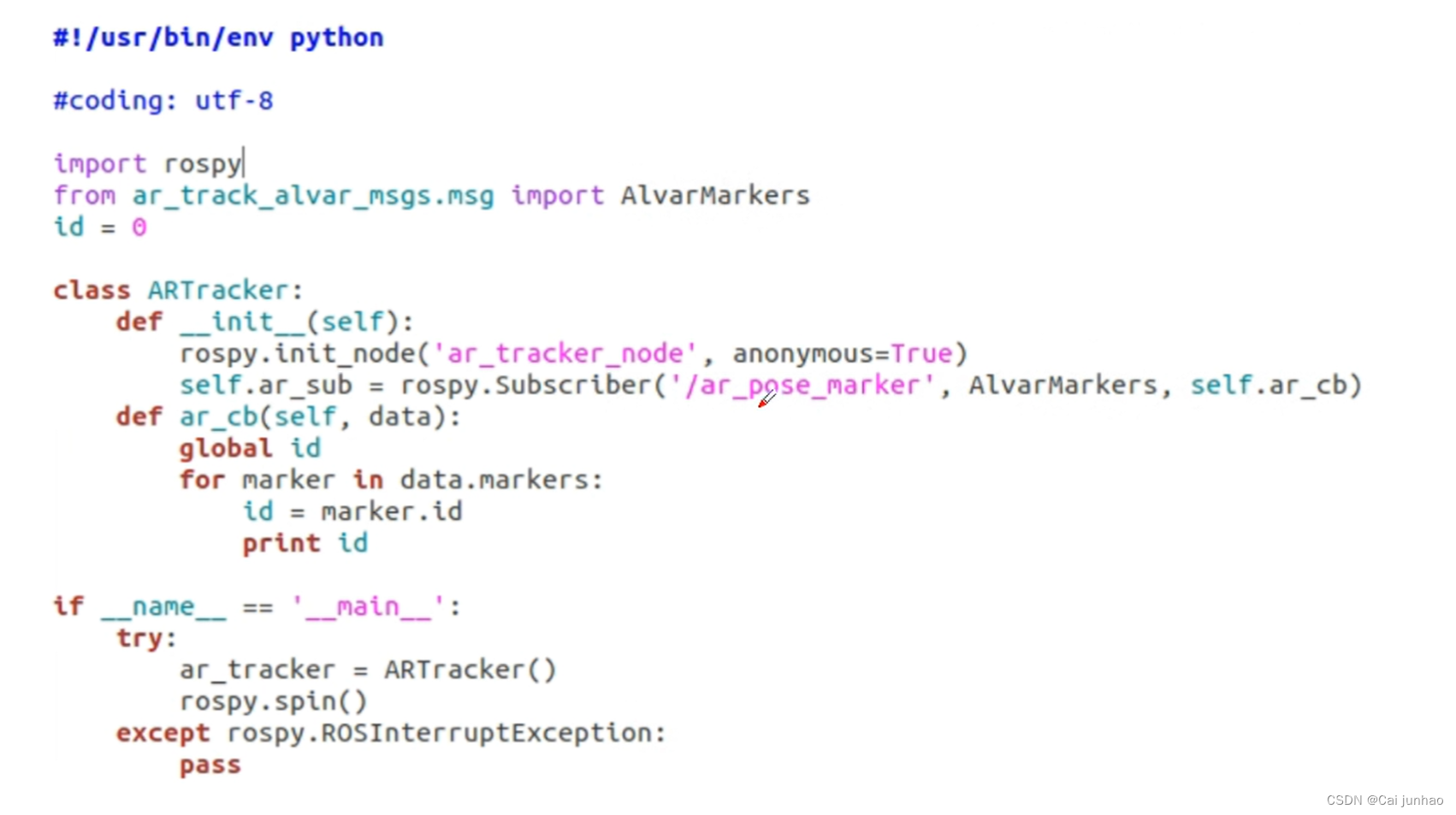
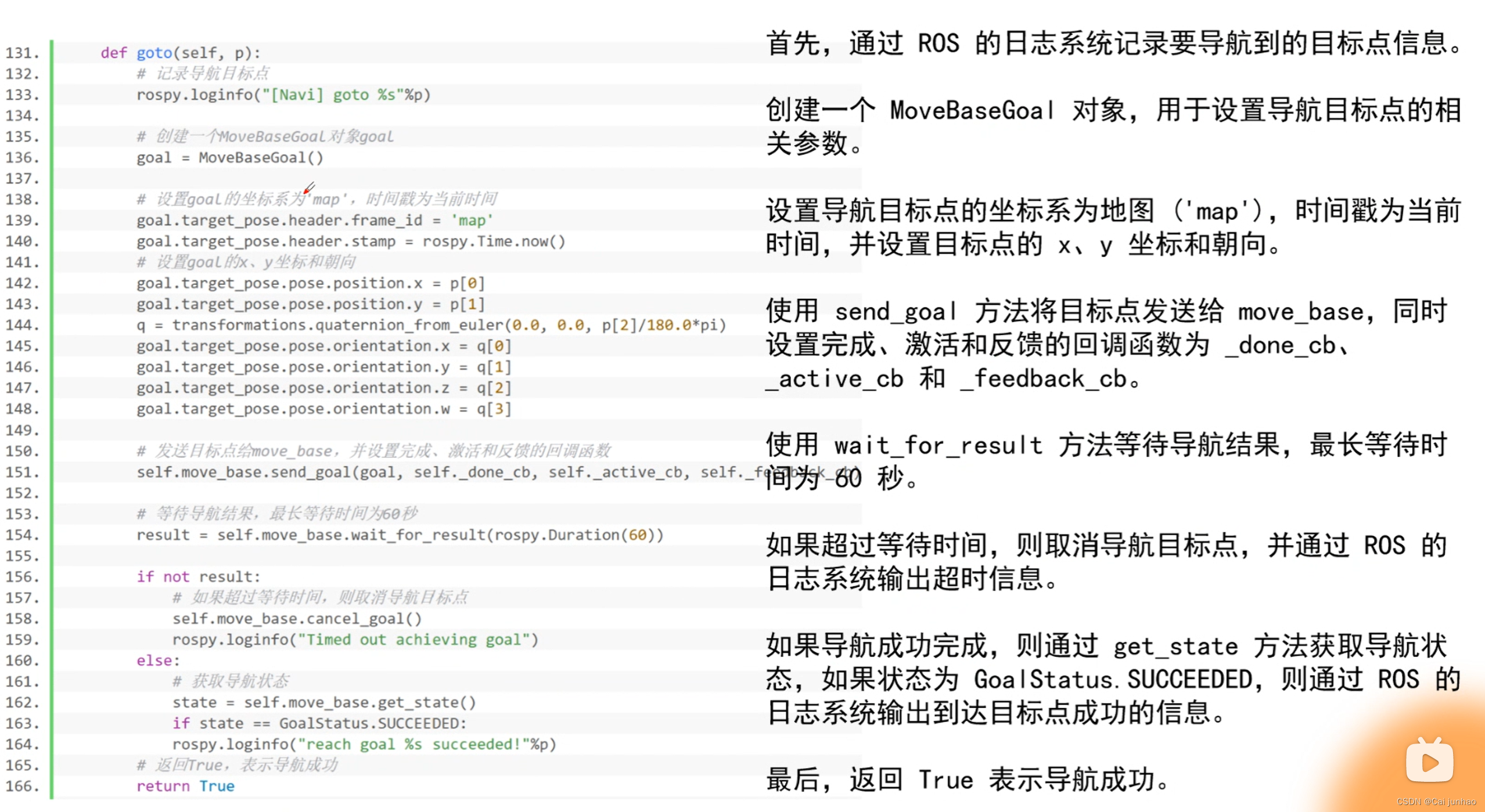
代码具体含义:
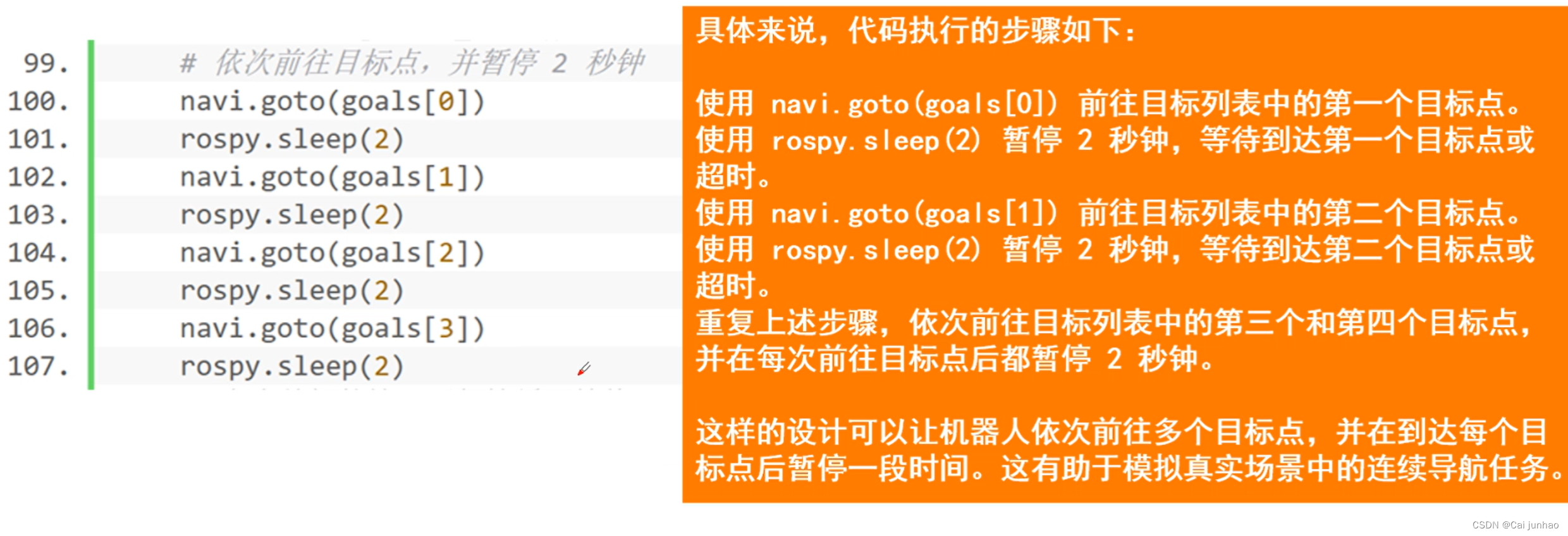
多点导航

讲解视频
1.万创鑫诚.自主巡航方案分析
2.万创鑫诚.自主巡航实践
其余篇章
1.【机器人和人工智能——自主巡航赛项】基础篇
2.【机器人和人工智能——自主巡航赛项】动手实践篇