一、 图论之最小生成树
(1)定义: 在连通的带权图的所有生成树中,权值和最小的那棵生成树(包含图中所有顶点的树),称作最小生成树。
(2)针对问题: 带权图的最短路径问题。
(3)最小生成树的解法有普里姆(Prim)算法和克鲁斯卡尔(Kruskal)算法,我们常用克鲁斯卡尔算法。
【案例1】
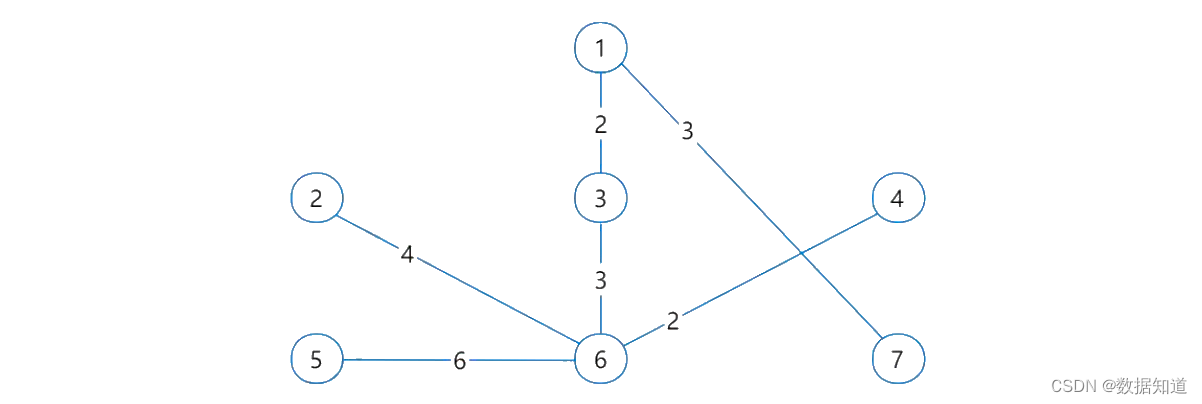
- 某小区有七栋楼房1~7,如下图所示,各楼房之间可修水管路线的长度(单位:百 米)已标记在连线旁。为修建连通各个楼房的水管,该小区内部水管的总长度至少为( )百米。

A.20
B.21
C.24
D.27
解析:
采用最小生成树的克鲁斯卡尔算法。
找出所有长度为 2 的边,试图将它们连接,有13、46,检验后没有形成闭环,可行。
找出所有长度为 3 的边,试图将它们连接,有17、36,检验后没有形成闭环,可行。
找出所有长度为 4 的边,试图将它们连接。有12和26。如果全部连接则形成闭环,需舍弃其中一个,这里舍弃12。
找出所有长度为 5 的边,试图将它们连接,有34,如连接则形成闭环,需舍弃。 找出所有长度为 6 的边,试图将它们连接,有14、56,如连接14则形成闭环,需舍弃;
连接56可行。
至此所有节点均完成连接,如下图所示。总长度为 2×2+3×2+4+6=20 百米。
答案:A
二、 图论之最大流量
1)最大流量问题是一个特殊的线性规划问题。
(2)针对问题: 道路运输能力问题,管道流量问题等
三、 线性规划
(1)定义: 线性规划是研究在有限的资源条件下,如何有效地使用这些资源达到预定目标的数学方法。从数学的角度来说,就是在一组约束条件下寻找目标表达式的极值问题。
(2)针对问题: 在资源约束下的生产问题等。
(3)线性规划的常用解法是图解法和联立方程组法。
四、 动态规划
(1)定义: 动态规划是一种将问题实例分解为更小的、相似的子问题,并存储子问题的解而避免计算重复的子问题,以解决最优化问题的算法策略。
(2)针对问题: 装货最大价值问题。
五、 决策分析
(1)定义: 决策分析指从若干可能的方案中通过决策分析技术,例如期望值法或决策树法等选择其一的决策过程,是一种定量分析方法。
(2)针对问题: 期望值问题,决策树问题。
(3)预期货币价值或者期望货币值(Expected Monetary Value,EMV):把某方案的每个可能结果所获得的收益与其发生概率相乘之后加总,即得到该方案的 EMV。通过比较各方案的 EMV 来决策采用哪一个方案。该方法常常与决策树技术相辅相成。
(4)解题技巧: 决策树在最左边做决策,所以需要从右向左逐层计算化简,特别是条件复杂时更应如此。
六、 不确定型决策论
(1)定义: 不确定型决策是在无法估计系统行动方案所处状态概率的情况下进行的决策。它与决策分析相反,决策分析是根据不同方案的收益与概率来量化计算出客观决策依据的方法论。
(2)决策者根据自己的主观倾向进行决策,可分为 5 种准则,分别为 乐观主义准则、悲观主义准则、折中主义准则、等可能性准则和后悔值准则。
- 1)
乐观主义准则,也称为“最大最大准则”,其决策原则是“大中取大”。决策者依次在决策表中的各个投资方案所对应的各个结果中选择出最大结果并记录,最后再从这些结果中选出最大者,其所对应的方案就是应该采取的决策方案。 - 2)
悲观主义准则,也称为“最大最小准则”,其决策原则是“小中取大”。决策者依次在决策表中的各个投资方案所对应的各个结果中选择出最小结果并记录,再从这些结果中选出最大者,其所对应的方案就是应该采取的决策方案。 - 3)
后悔值准则,也称为“最小最大后悔值”,该决策法的基本原理为:将每种自然状态的最高值(指收益矩阵,如果是损失矩阵应取最低值)定为该状态的理想目标,并将该状态中的其他值与最高值相比,所得之差作为未达到理想的后悔值。为了提高决策的可靠性,在每一方案中选取最大的后悔值,再在各方案的最大后悔值中选取最小值作为决策依据,与该值所对应的方案即 为入选方案。