1、阅读 Linux 内核源码
学习 Linux 有两种路线:
1)按照 Linux 启动流程,梳理每个子系统。
2)把 Linux 所有用到的子系统学会,再组合起来。
博主选择第一种方式,可以快速上手,知道自己在学什么东西,在什么阶段起作用。
阅读 Linux 和 Android 源码:
https://elixir.bootlin.com/linux/latest/source
http://aospxref.com/
2、Makefile 与 Kconfig
1)Makefile
- Makefile 是一种被广泛用于管理源代码的工具,特别是针对程序的编译和构建。它包含了一系列规则,指定了编译器如何编译源文件、链接器如何链接目标文件,以及如何清理生成的文件等操作。
- Makefile 的作用:通过 Makefile,开发人员可以指定项目中源文件的依赖关系,使得只有受影响的文件被编译,而不是每次都编译整个项目,节省时间和资源。
- Makefile 结构:典型的 Makefile 包含了变量定义、目标规则、依赖关系和命令等内容。
2)Kconfig
- Kconfig 是 Linux 内核用于配置内核选项的工具,允许用户在编译内核时选择不同的配置选项以定制内核的功能。
- Kconfig 文件:Kconfig 文件包含了内核配置选项的描述,格式为类似于菜单的层次结构,用户可以通过命令行或图形界面交互式地选择选项,以配置内核的特性和行为。
- Kconfig 的作用:Kconfig 允许用户对内核进行高度定制,以适应不同的硬件平台、应用需求或性能要求,而无需重新编译整个内核。
3)总结
- Makefile 是用于管理源代码编译和构建的工具,利用规则来指导建立整个项目。
- Kconfig 是 Linux 内核的配置工具,用于选择编译内核时的不同配置选项,定制内核的功能和行为。
3、内核裁剪与内核移植
1)内核裁剪
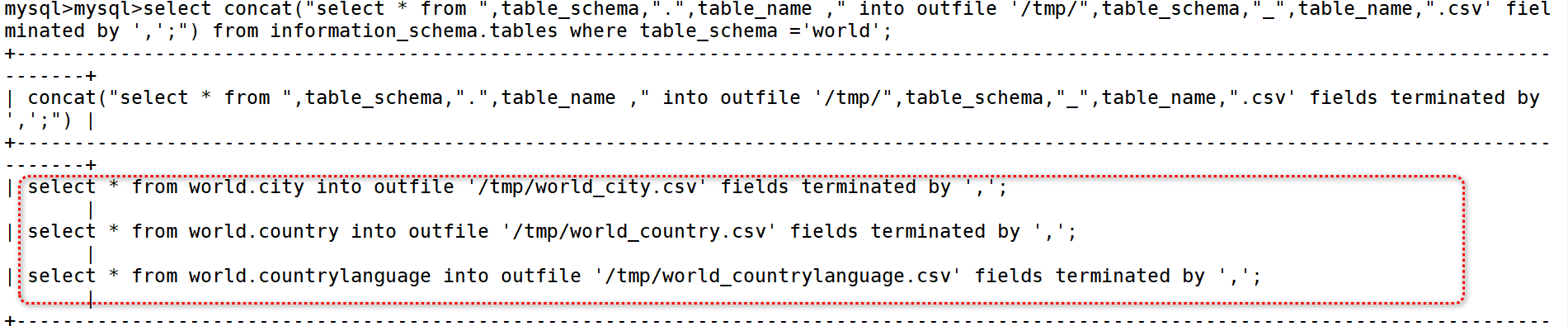
make menuconfig 命令在 Linux 内核源码根目录执行,执行后效果如图:
![[图片]](https://img-blog.csdnimg.cn/direct/d2ceb5889f644bf59064adbf3347a684.png)
- “方向按键”中的“左右”可以选择你需要的操作。“”表示进入选择的配置界面,“”表示返回,“< Help >”可以阅读帮助文档。
- 输入“/”,可以进入搜索界面。
make menuconfig 是 Linux 内核构建过程中的一个命令,用于交互式地配置内核选项。通过运行 make menuconfig 命令,用户可以在终端中打开一个基于文本界面的菜单系统,以便于选择和配置 Linux 内核的各种功能选项、驱动程序和特性。
具体来说,make menuconfig 命令的作用包括以下几点:
- 配置内核选项:通过 make menuconfig,用户可以浏览各种内核选项,例如驱动程序、文件系统支持、网络配置等,并可以根据需求进行启用、禁用、选择或设置。
- 交互式选择:使用键盘进行上下左右移动,空格键选择选项,以及对选项进行开启或关闭操作。
- 依赖关系:make menuconfig 会显示选项之间的依赖关系,使得用户可以清晰地了解选择一个选项可能会影响到哪些其他选项。
- 保存配置:按 ESC 可以退出这个界面,会提示你是否要保存。配置的修改可以保存并生成 .config 文件,该文件包含了用户的配置选择,可用于后续编译内核。
- 定制内核:通过调整不同的配置选项,用户可以定制适合特定需求的内核,例如精简内核以提高性能,或者增加特定的功能支持。
总的来说,make menuconfig 提供了一种方便、交互式的方式来配置 Linux 内核,使得用户可以根据自己的需求定制内核的功能和特性。
2)内核移植
![[图片]](https://img-blog.csdnimg.cn/direct/63214ec303e04d0ba9c77a72424b5585.png)
4、Linux 启动流程详解
建议大家深入学习 Linux kernel 某个子系统之前,先学习 Linux kernel 启动流程,这样能有一个框架,你学的子系统就不是孤立存在于你的知识系统中,你知道它是在哪个时刻被调用的。
从启动引导程序 bootloader(uboot)跳转到 Linux kernel 后,Linux 内核开始启动, 我们先看一下 Linux 内核启动入口。
linux4.14/arch/arm/kernel/vmlinux.lds.S
这里可以看到链接时候 Linux 入口是 stext 段,这里是 uboot 跳转过来的第一段 Linux kernel 代码:
OUTPUT_ARCH(arm)
ENTRY(stext)
1)Linux 入口地址
我们先看一下入口地址的确定,同一文件中找到 SECTIONS
SECTIONS
{/DISCARD/ : {*(.ARM.exidx.exit.text)*(.ARM.extab.exit.text)ARM_CPU_DISCARD(*(.ARM.exidx.cpuexit.text))ARM_CPU_DISCARD(*(.ARM.extab.cpuexit.text))ARM_EXIT_DISCARD(EXIT_TEXT)ARM_EXIT_DISCARD(EXIT_DATA)EXIT_CALL
#ifndef CONFIG_MMU*(.text.fixup)*(__ex_table)
#endif
#ifndef CONFIG_SMP_ON_UP*(.alt.smp.init)
#endif*(.discard)*(.discard.*)}. = PAGE_OFFSET + TEXT_OFFSET;.head.text : {_text = .;HEAD_TEXT}
这个 SECTIONS 比较长,只放一部分。在这里倒数第五行有个比较重要的东西:
. = PAGE_OFFSET + TEXT_OFFSET;
这一句表示了 Linux kernel 真正的启动地址。
PAGE_OFFSET 是 Linux kernel 空间的虚拟起始地址,定义在:
linux4.14/arch/arm64/include/asm/memory.h
#define VA_BITS (CONFIG_ARM64_VA_BITS)
#define VA_START (UL(0xffffffffffffffff) - \(UL(1) << VA_BITS) + 1)
#define PAGE_OFFSET (UL(0xffffffffffffffff) - \(UL(1) << (VA_BITS - 1)) + 1)
#define KIMAGE_VADDR (MODULES_END)
#define MODULES_END (MODULES_VADDR + MODULES_VSIZE)
#define MODULES_VADDR (VA_START + KASAN_SHADOW_SIZE)
#define MODULES_VSIZE (SZ_128M)
#define VMEMMAP_START (PAGE_OFFSET - VMEMMAP_SIZE)
#define PCI_IO_END (VMEMMAP_START - SZ_2M)
#define PCI_IO_START (PCI_IO_END - PCI_IO_SIZE)
#define FIXADDR_TOP (PCI_IO_START - SZ_2M)
这里的地址都很重要,很多地方会用到。当然,这里的地址可能会随着 Linux kernel 版本的不同和硬件的不同,会变化。这里没有一个具体的数,因为 VA_BITS 中的数字是可选的,大家可以根据自己的平台算一下。 VA_BITS 是你的系统真正使用的位数,如果是 32 位系统就是 32,如果是 64 位系统可能是 39 位或者其他。
TEXT_OFFSET 定义在 linux4.14/arch/arm/Makefile 中:
textofs-y := 0x00008000
The byte offset of the kernel image in RAM from the start of RAM.
TEXT_OFFSET := $(textofs-y)
这个值一般是 0x00008000 ,算出 PAGE_OFFSET 后加上这个值就是 Linux 内核的起始地址。
修改这个偏移量就可以使 Linux 内核拷贝到不同的地址,自己修改注意内存对齐。
2)stext 段
从上面的 ENTRY(stext)可以知道,一开始是运行 stext 段,这个段内的代码是 start_kernel 函数前汇编环境的初始化。
linux4.14/arch/arm64/kernel/head.S
ENTRY(stext)bl preserve_boot_argsbl el2_setup // Drop to EL1, w0=cpu_boot_modeadrp x23, __PHYS_OFFSETand x23, x23, MIN_KIMG_ALIGN - 1 // KASLR offset, defaults to 0bl set_cpu_boot_mode_flagbl __create_page_tablesbl __cpu_setup // initialise processorb __primary_switch
ENDPROC(stext)
- preserve_boot_args 保存 uboot 传递过来的参数。
- el2_setup 是设置 Linux 启动模式是 EL2。Linux 有 EL0、EL1、EL2、EL3 四种异常启动模式,这里设置一开始是 EL2,EL2 支持虚拟内存技术,然后注释说明后面又退回 EL1,在 EL1 启动 kernel。EL3 一般是只在安全模式使用。(ARM64情况下)
- 4、5 行:这两行设定了 offset,是一种 KASLR 技术,有了这个技术才能使得 Linux kernel 被拷贝到不同的物理地址。
- set_cpu_boot_mode_flag 保存上面 cpu 的启动模式。
- __create_page_tables 创建页表。
- __cpu_setup 初始化 CPU,这里主要是初始化和 MMU 内存相关的 CPU 部分。
- __primary_switch 这里会进行跳转。
在同一个文件中,会跳转到这里:
__primary_switch:
#ifdef CONFIG_RANDOMIZE_BASEmov x19, x0 // preserve new SCTLR_EL1 valuemrs x20, sctlr_el1 // preserve old SCTLR_EL1 value
#endifbl __enable_mmu
#ifdef CONFIG_RELOCATABLEbl __relocate_kernel
#ifdef CONFIG_RANDOMIZE_BASEldr x8, =__primary_switchedadrp x0, __PHYS_OFFSETblr x8
开启了 MMU。然后最重要的是跳转到 __primary_switched 函数。先把 __primary_switched 地址放到 x8 寄存器中,再跳转到 x8,也就是跳转到 __primary_switched。
__primary_switched:adrp x4, init_thread_unionadd sp, x4, #THREAD_SIZEadr_l x5, init_taskmsr sp_el0, x5 // Save thread_infoadr_l x8, vectors // load VBAR_EL1 with virtualmsr vbar_el1, x8 // vector table addressisbstp xzr, x30, [sp, #-16]!mov x29, spstr_l x21, fdt_pointer, __x5 // Save FDT pointerldr_l x4, kimage_vaddr // Save the offset betweensub x4, x4, x0 // the kernel virtual andstr_l x4, kimage_voffset, x5 // physical mappings// Clear BSSadr_l x0, __bss_startmov x1, xzradr_l x2, __bss_stopsub x2, x2, x0bl __pi_memsetdsb ishst // Make zero page visible to PTW#ifdef CONFIG_KASANbl kasan_early_init
#endif
#ifdef CONFIG_RANDOMIZE_BASEtst x23, ~(MIN_KIMG_ALIGN - 1) // already running randomized?b.ne 0fmov x0, x21 // pass FDT address in x0bl kaslr_early_init // parse FDT for KASLR optionscbz x0, 0f // KASLR disabled? just proceedorr x23, x23, x0 // record KASLR offsetldp x29, x30, [sp], #16 // we must enable KASLR, returnret // to __primary_switch()
0:
#endifadd sp, sp, #16mov x29, #0mov x30, #0b start_kernel
ENDPROC(__primary_switched)
- 第一段: 初始化了 init 进程的内存信息,开辟了内存空间。
- 第二段:设置了中断向量表。
- 第三段: 保存了 FDT,也就是 flat device tree ,设备树。
- 第四段:清除了BSS 段,我们知道一般是内存四区:堆区、栈区、全局区、代码区。其中全局区可以再分为 data 段和 BSS 段,BSS 段存储了未初始化的变量,这里将BSS段进行清零操作,否则内存中的值是不确定的,这是一个传统操作。
- 最后:跳转到了我们熟悉的 start_kernel
3)start_kernel 函数
linux4.14/init/main.c,start_kernel 函数,从汇编环境跳转到了 C 环境。
kernel 4.14 中 start_kernel 函数一共调用了 86 个函数进行初始化 ,如下:
asmlinkage __visible void __init __no_sanitize_address start_kernel(void)
{char *command_line;char *after_dashes;set_task_stack_end_magic(&init_task);/*设置任务栈结束魔术数,用于栈溢出检测*/smp_setup_processor_id();/*跟 SMP 有关(多核处理器),设置处理器 ID*/debug_objects_early_init();/* 做一些和 debug 有关的初始化 */init_vmlinux_build_id();cgroup_init_early();/* cgroup 初始化,cgroup 用于控制 Linux 系统资源*/local_irq_disable();/* 关闭当前 CPU 中断 */early_boot_irqs_disabled = true;/** 中断关闭期间做一些重要的操作,然后打开中断*/boot_cpu_init();/* 跟 CPU 有关的初始化 */page_address_init();/* 页地址相关的初始化 */pr_notice("%s", linux_banner);/* 打印 Linux 版本号、编译时间等信息 */early_security_init();/* 系统架构相关的初始化,此函数会解析传递进来的* ATAGS 或者设备树(DTB)文件。会根据设备树里面* 的 model 和 compatible 这两个属性值来查找* Linux 是否支持这个单板。此函数也会获取设备树* 中 chosen 节点下的 bootargs 属性值来得到命令* 行参数,也就是 uboot 中的 bootargs 环境变量的* 值,获取到的命令行参数会保存到 command_line 中*/setup_arch(&command_line);setup_boot_config();setup_command_line(command_line);/* 存储命令行参数 *//* 如果只是 SMP(多核 CPU)的话,此函数用于获取* CPU 核心数量,CPU 数量保存在变量 nr_cpu_ids 中。*/setup_nr_cpu_ids();setup_per_cpu_areas();/* 在 SMP 系统中有用,设置每个 CPU 的 per-cpu 数据 */smp_prepare_boot_cpu(); /* arch-specific boot-cpu hooks */boot_cpu_hotplug_init();build_all_zonelists(NULL);/* 建立系统内存页区(zone)链表 */page_alloc_init();/* 处理用于热插拔 CPU 的页 *//* 打印命令行信息 */ pr_notice("Kernel command line: %s\n", saved_command_line);/* parameters may set static keys */jump_label_init();parse_early_param();/* 解析命令行中的 console 参数 */after_dashes = parse_args("Booting kernel",static_command_line, __start___param,__stop___param - __start___param,-1, -1, NULL, &unknown_bootoption);print_unknown_bootoptions();if (!IS_ERR_OR_NULL(after_dashes))parse_args("Setting init args", after_dashes, NULL, 0, -1, -1,NULL, set_init_arg);if (extra_init_args)parse_args("Setting extra init args", extra_init_args,NULL, 0, -1, -1, NULL, set_init_arg);random_init_early(command_line);setup_log_buf(0);/* 设置 log 使用的缓冲区*/vfs_caches_init_early(); /* 预先初始化 vfs(虚拟文件系统)的目录项和索引节点缓存*/sort_main_extable();/* 定义内核异常列表 */trap_init();/* 完成对系统保留中断向量的初始化 */mm_init();/* 内存管理初始化 */ftrace_init();/* trace_printk can be enabled here */early_trace_init();sched_init();/* 初始化调度器,主要是初始化一些结构体 */if (WARN(!irqs_disabled(),"Interrupts were enabled *very* early, fixing it\n"))local_irq_disable();/* 检查中断是否关闭,如果没有的话就关闭中断 */radix_tree_init();/* 基数树相关数据结构初始化 */maple_tree_init();housekeeping_init();workqueue_init_early();rcu_init();/* 初始化 RCU,RCU 全称为 Read Copy Update(读-拷贝修改) *//* Trace events are available after this */trace_init();/* 跟踪调试相关初始化 */if (initcall_debug)initcall_debug_enable();context_tracking_init();/* 初始中断相关初始化,主要是注册 irq_desc 结构体变* 量,因为 Linux 内核使用 irq_desc 来描述一个中断。*/early_irq_init();init_IRQ();/* 中断初始化 */tick_init();/* tick 初始化 */rcu_init_nohz();init_timers();/* 初始化定时器 */srcu_init();hrtimers_init();/* 初始化高精度定时器 */softirq_init();/* 软中断初始化 */timekeeping_init();time_init();/* 初始化系统时间 */random_init();kfence_init();boot_init_stack_canary();perf_event_init();profile_init();call_function_init();WARN(!irqs_disabled(), "Interrupts were enabled early\n");early_boot_irqs_disabled = false;local_irq_enable();/* 使能中断 */kmem_cache_init_late();/* slab 初始化,slab 是 Linux 内存分配器 *//* 初始化控制台,之前 printk 打印的信息都存放* 缓冲区中,并没有打印出来。只有调用此函数* 初始化控制台以后才能在控制台上打印信息。*/console_init();if (panic_later)panic("Too many boot %s vars at `%s'", panic_later,panic_param);lockdep_init();locking_selftest();/* 锁自测 */ mem_encrypt_init();#ifdef CONFIG_BLK_DEV_INITRDif (initrd_start && !initrd_below_start_ok &&page_to_pfn(virt_to_page((void *)initrd_start)) < min_low_pfn) {pr_crit("initrd overwritten (0x%08lx < 0x%08lx) - disabling it.\n",page_to_pfn(virt_to_page((void *)initrd_start)),min_low_pfn);initrd_start = 0;}
#endifsetup_per_cpu_pageset();numa_policy_init();acpi_early_init();if (late_time_init)late_time_init();sched_clock_init();/* 测定 BogoMIPS 值,可以通过 BogoMIPS 来判断 CPU 的性能* BogoMIPS 设置越大,说明 CPU 性能越好。*/calibrate_delay();pid_idr_init();anon_vma_init();/* 生成 anon_vma slab 缓存 */
#ifdef CONFIG_X86if (efi_enabled(EFI_RUNTIME_SERVICES))efi_enter_virtual_mode();
#endifthread_stack_cache_init();cred_init();/* 为对象的每个用于赋予资格(凭证) */fork_init();/* 初始化一些结构体以使用 fork 函数 */proc_caches_init();/* 给各种资源管理结构分配缓存 */uts_ns_init();key_init();/* 初始化密钥 */security_init();/* 安全相关初始化 */dbg_late_init();net_ns_init();vfs_caches_init();/* 虚拟文件系统缓存初始化 */pagecache_init();signals_init();/* 初始化信号 */seq_file_init();proc_root_init();/* 注册并挂载 proc 文件系统 */nsfs_init();/* 初始化 cpuset,cpuset 是将 CPU 和内存资源以逻辑性* 和层次性集成的一种机制,是 cgroup 使用的子系统之一*/cpuset_init();cgroup_init();/* 初始化 cgroup */taskstats_init_early();/* 进程状态初始化 */delayacct_init();poking_init();check_bugs();/* 检查写缓冲一致性 */acpi_subsystem_init();arch_post_acpi_subsys_init();kcsan_init();/* 调用 rest_init 函数 *//* 创建 init、kthread、idle 线程 */arch_call_rest_init();prevent_tail_call_optimization();
}
![[图片]](https://img-blog.csdnimg.cn/direct/31c10fb7e0684edd8866bef0972db9e0.png)
![[图片]](https://img-blog.csdnimg.cn/direct/458b074d2d5d4376b7600b3602554216.png)
![[图片]](https://img-blog.csdnimg.cn/direct/a0570563371a40379817bcbed5993a74.png)
其中有七个函数较为重要,分别为:
setup_arch(&command_line);
mm_init();
sched_init();
init_IRQ();
console_init();
vfs_caches_init();
rest_init();
1、setup_arch(&command_line)
此函数是系统架构初始化函数,处理 uboot 传递进来的参数,不同的架构进行不同的初始化,也就是说每个架构都会有一个 setup_arch 函数。
linux4.14/arch/arm/kernel/setup.c
void __init setup_arch(char **cmdline_p)
{const struct machine_desc *mdesc;setup_processor();mdesc = setup_machine_fdt(__atags_pointer);if (!mdesc)mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);machine_desc = mdesc;machine_name = mdesc->name;dump_stack_set_arch_desc("%s", mdesc->name);if (mdesc->reboot_mode != REBOOT_HARD)reboot_mode = mdesc->reboot_mode;init_mm.start_code = (unsigned long) _text;init_mm.end_code = (unsigned long) _etext;init_mm.end_data = (unsigned long) _edata;init_mm.brk = (unsigned long) _end;/* populate cmd_line too for later use, preserving boot_command_line */strlcpy(cmd_line, boot_command_line, COMMAND_LINE_SIZE);*cmdline_p = cmd_line;early_fixmap_init();early_ioremap_init();parse_early_param();#ifdef CONFIG_MMUearly_mm_init(mdesc);
#endifsetup_dma_zone(mdesc);xen_early_init();efi_init();adjust_lowmem_bounds();arm_memblock_init(mdesc);adjust_lowmem_bounds();early_ioremap_reset();paging_init(mdesc);request_standard_resources(mdesc);if (mdesc->restart)arm_pm_restart = mdesc->restart;unflatten_device_tree();arm_dt_init_cpu_maps();psci_dt_init();
#ifdef CONFIG_SMPif (is_smp()) {if (!mdesc->smp_init || !mdesc->smp_init()) {if (psci_smp_available())smp_set_ops(&psci_smp_ops);else if (mdesc->smp)smp_set_ops(mdesc->smp);}smp_init_cpus();smp_build_mpidr_hash();}
#endifif (!is_smp())hyp_mode_check();reserve_crashkernel();#ifdef CONFIG_MULTI_IRQ_HANDLERhandle_arch_irq = mdesc->handle_irq;
#endif#ifdef CONFIG_VT
#if defined(CONFIG_VGA_CONSOLE)conswitchp = &vga_con;
#elif defined(CONFIG_DUMMY_CONSOLE)conswitchp = &dummy_con;
#endif
#endifif (mdesc->init_early)mdesc->init_early();
}
- setup_processor():查找给定的机器 ID,根据机器 ID 设置 cache 相关标志位,再对处理器进行初始化。
- setup_machine_fdt:根据设备树传递过来的指针,找到对应的内存,从内存中找到设备树传递的参数。
- setup_machine_tags:根据机器 ID ,查找对应的 machine_desc 结构体,配置内存条信息。 machine_desc 结构体每个架构都有自己的,参数不一样。
- setup_arch 中后面的操作基本都是围绕 machine_desc 结构体,对它进行填充或者调用。
- paging_init(mdesc):页表初始化,这里主要是初始化了 bootmem 分配器,在初始化阶段担任内存分配任务(此时伙伴系统和 slab 并没有起来)。它首先通过检测出来的处理器类型进行处理器内核的初始化,然后通过 - bootmem_init() 函数根据系统定义的 meminfo 结构进行内存结构的初始化。
- unflatten_device_tree():解析设备树,如果需要对设备树的内容进行深入研究,请从这里跟进去,看看是如何一步一步建立树状结构的。
- setup_arch 是 start_kernel 阶段最重要的一个函数,/kernel/arch 下每个体系都有自己的 setup_arch 函数,具体编译哪个体现,看根目录 Makefile 中的 ARCH 变量。
2、mm_init
内存初始化函数,最主要作用是告诉系统有多少内存可以使用。
linux4.14/init/main.c
static void __init mm_init(void)
{page_ext_init_flatmem();mem_init();kmem_cache_init();pgtable_init();vmalloc_init();ioremap_huge_init();init_espfix_bsp();pti_init();
}
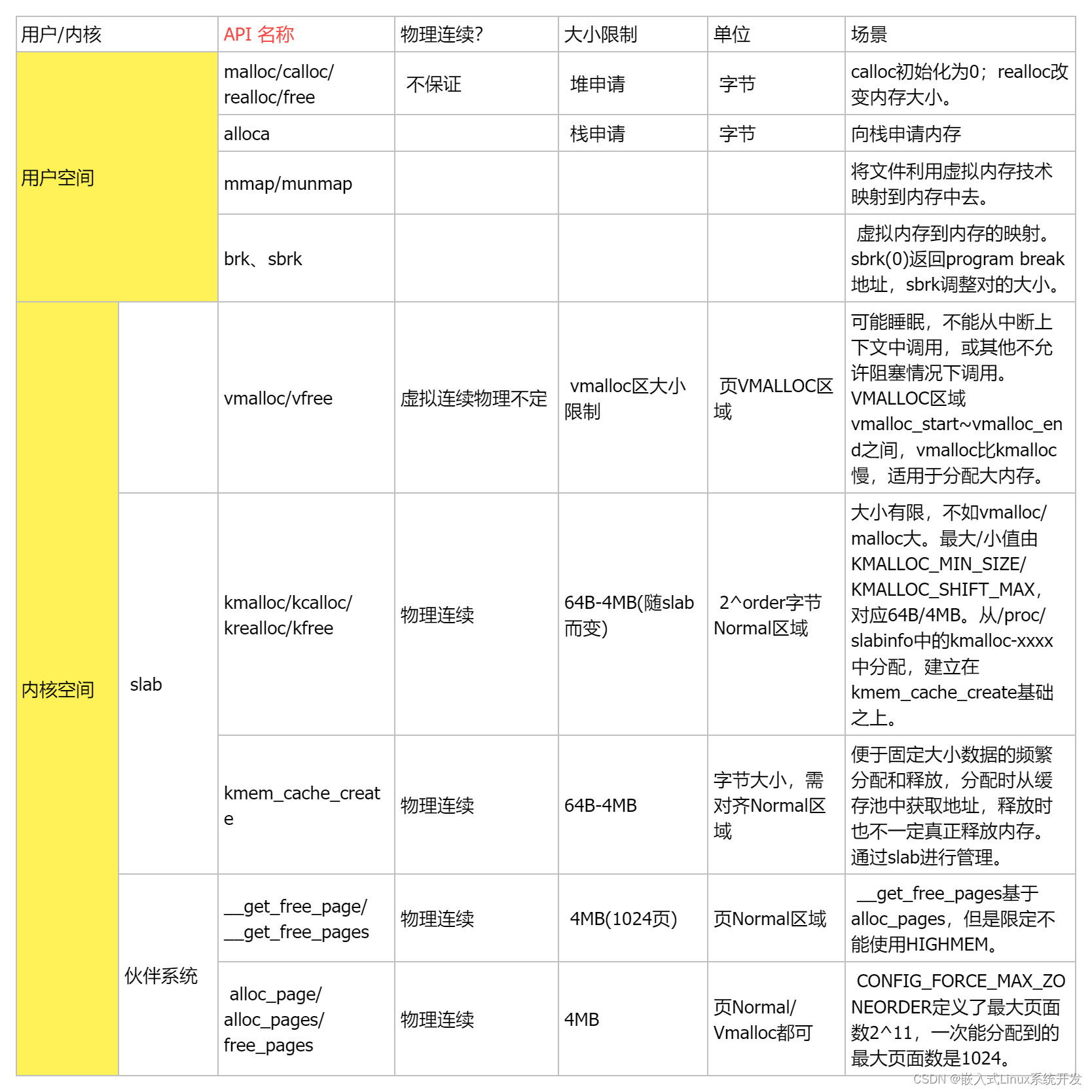
mem_init():关闭并释放 bootmem 分配器,释放未使用的页并入伙伴系统数据结构中,并转换为伙伴系统分配器。
kmem_cache_init():初始化 kmem_cache,启动 slab 分配器,用于小内存分配。
补充:
Linux 采用伙伴系统解决外部碎片的问题,采用 slab 解决内部碎片的问题。
内部碎片:内存已经被分配出去,明确属于某个进程,但却一直没有被使用。
外部碎片:内存还没有被分配出去,不属于任何进程,但由于其太小,夹在中间,无法满足新申请内存的需要,导致一直空闲。频繁的分配和回收物理页面会导致大量的、连续且小的页面夹在已经被分配的内存中间,产生外部碎片。
伙伴系统(buddy allocator)是以页为单位管理和分配内存,slab 以字节为单位分配内存(特别适合结构体的内存分配)。
注意,slab 不是和伙伴系统并列的,是基于伙伴系统的再一次分配,底层是伙伴系统。
slab、slub、slob 都是小内存分配器,slab 是基础,slub 和 slob 是优化版本。slub 适合大物理内存的大规模并行系统,slob 适合小型嵌入式系统,其实现只有 600 多行。具体使用哪个可以配置。
3、sched_init
调度器初始化。调度是一个子系统,内部非常复杂,最终目标是满足用户需求,使用户获得良好的系统体验。
Linux 内核实现了四种调度方式:deadline、realtime、CFS、idle
一般是采用 CFS 调度方式。作为一个普适性的操作系统,必须考虑各种需求,我们不能只按照中断优先级或者时间轮转片来规定进程运行的时间。作为一个多用户操作系统,必须考虑到每个用户的公平性。不能因为一个用户没有高级权限,就限制他的进程的运行时间,要考虑每个用户拥有公平的时间。
linux4.14/kernel/sched/core.c
void __init sched_init(void)
{int i, j;unsigned long alloc_size = 0, ptr;sched_clock_init();wait_bit_init();#ifdef CONFIG_FAIR_GROUP_SCHEDalloc_size += 2 * nr_cpu_ids * sizeof(void **);
#endif
#ifdef CONFIG_RT_GROUP_SCHEDalloc_size += 2 * nr_cpu_ids * sizeof(void **);
#endifif (alloc_size) {ptr = (unsigned long)kzalloc(alloc_size, GFP_NOWAIT);#ifdef CONFIG_FAIR_GROUP_SCHEDroot_task_group.se = (struct sched_entity **)ptr;ptr += nr_cpu_ids * sizeof(void **);root_task_group.cfs_rq = (struct cfs_rq **)ptr;ptr += nr_cpu_ids * sizeof(void **);#endif /* CONFIG_FAIR_GROUP_SCHED */
#ifdef CONFIG_RT_GROUP_SCHEDroot_task_group.rt_se = (struct sched_rt_entity **)ptr;ptr += nr_cpu_ids * sizeof(void **);root_task_group.rt_rq = (struct rt_rq **)ptr;ptr += nr_cpu_ids * sizeof(void **);#endif /* CONFIG_RT_GROUP_SCHED */}
此函数主要是对进程调度器的数据结构进行初始化,如果是多核 CPU,就为每个 CPU 创建运行队列,初始调度策略为 CFS,后面根据上下文和进程的不同(实时进程、高优先级进程、特殊进程)可以切换调度策略。
GROUP_SCHED:主要是组调度相关,内核可以将进程或者线程分组,因为 Linux 是一个多用户操作系统,我们不希望因为某个用户的进程优先级一直很高,就使得其他用户的进程得不到运行。我们系统每个用户平分 CPU 时间,比如每个 APP 平分 CPU 时间。
cfs_rq 和 rt_rq:分别是 CFS 调度策略的 runqueue 和 Realtime 的 runqueue ,这里是对这个结构体进行初始化,方便后期调用。
不同调度策略出现的原因是我们有不同的进程:交互式进程(shell、vim)、批处理进程(文件 IO)、实时进程。根据进程的不同,组合各种调度策略,优化用户体验,满足用户需求。
CFS 调度器:完全公平调度,引入虚拟运行时间的概念,每次一个进程在 CPU 中执行了一段时间,就会增加它的虚拟运行时记录;每次选择要执行的进程时候,不是选择优先级最高的那个,而是选择虚拟运行时长最少的进程。(虚拟运行时间和真实运行时间不同,权重大的进程虚拟运行时间增长会缓慢)
deadline 调度器:按照进程最后截止期限来调度,选择快要截止的进程执行
realtime 调度器:实时调度器,为每个优先级维护一个队列,可以采用时间片轮转或者先进先出等方式。
idle 调度器:当系统空闲时处于这个调度方式。
多核情况下,在 CFS 调度策略中,每个 CPU 只维护本地的运行队列中的进程公平,多核之间需要定时进行负载均衡,做 load balance,不能出现一个 CPU 很忙,另外一个 CPU 很闲。
4、init_IRQ
中断初始化函数,这个很好理解,大家都用过中断。这里主要是在 irqchip_init() 函数中对 GIC 中断控制器进行初始化。
这部分就不多写了,不然乱了主次,本文主要聚焦启动流程,中断子系统我会单独写文章讲解。
linux4.14/arch/arm/kernel/irq.c
void __init init_IRQ(void)
{int ret;if (IS_ENABLED(CONFIG_OF) && !machine_desc->init_irq)irqchip_init();elsemachine_desc->init_irq();if (IS_ENABLED(CONFIG_OF) && IS_ENABLED(CONFIG_CACHE_L2X0) &&(machine_desc->l2c_aux_mask || machine_desc->l2c_aux_val)) {if (!outer_cache.write_sec)outer_cache.write_sec = machine_desc->l2c_write_sec;ret = l2x0_of_init(machine_desc->l2c_aux_val,machine_desc->l2c_aux_mask);if (ret && ret != -ENODEV)pr_err("L2C: failed to init: %d\n", ret);}uniphier_cache_init();
}
中断子系统非常复杂,一般在 ARM 中,是 GIC 中断控制器,有 V1~V4 四个版本,V1 和 V2 是面向 32 位情况,V3 和 V4 是面向 64 位需求。这里会通过一系列调用,初始化 GIC 中断控制器。
GICV1 已经废弃,GICV2 在内核层面有三种中断类型:PPI、SPI、SGI。 GICV3 有四种中断类型: PPI、SPI、SGI、LPI。
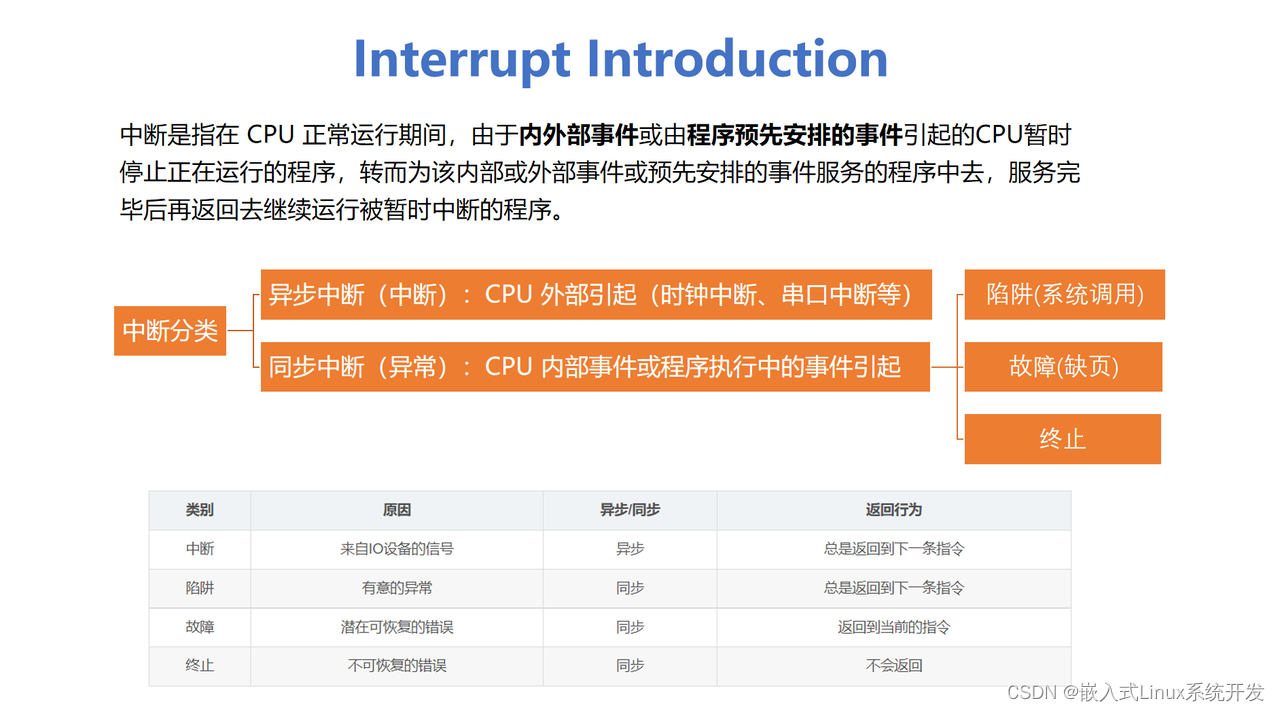
第一个就是我们常用的配置的中断,本名叫异步中断。
第二个是陷阱,比如我们调用 open 函数这个系统调用,从用户态到内核态,就叫陷阱,是同步中断。所有的系统调用函数都是。
第三个是故障,比如内存缺页,如果内核可以修复,那OK,如果修复不了系统就会挂掉,大部分时间是修复不了的。
第四个是终止,就是系统直接挂掉的意思。
5、console_init
在这个函数初始化之前,你所有写的内核打印函数 printk 都打印不出东西,所有打印都会存在 buf 里,此函数初始化以后,会将 buf 里面的数据打印出来,你才能在终端看到 printk 打印的东西。
在此之前,如果确实有需要打印 log,可以使用 uboot 的打印函数。kernel 前期可以使用 early_printk。
tty 是 Linux 中的终端, _con_initcall_start 和_con_initcall_end 这两句的意思是执行所有两者之间的 initcall 函数。在两者中间会有串口驱动初始化的 init 函数。至于 initcall 机制,我会在驱动加载顺序的文章中进行讲解。
linux4.14/kernel/printk/printk.c
void __init console_init(void)
{initcall_t *call;/* Setup the default TTY line discipline. */n_tty_init();/** set up the console device so that later boot sequences can* inform about problems etc..*/call = __con_initcall_start;while (call < __con_initcall_end) {(*call)();call++;}
}
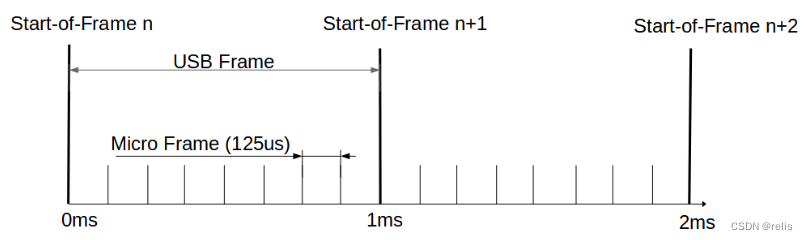
tty 驱动和其他驱动是不一样的,tty 的输入设备是键盘,输出设备是显示屏,而不像平常的设备输入输出是一个东西,因此驱动框架和普通的驱动不同:
tty架构,简单来分的话可以说成两层,下层我们的串口驱动层,它直接与硬件相接触,我们需要填充一个 struct uart_ops 的结构体,上层 tty 层,包括 tty 核心以及线路规程,它们各自都有一个 Ops 结构,用户空通过间是 tty 注册的字符设备节点来访问。
![[图片]](https://img-blog.csdnimg.cn/direct/80595ffeb9a740748ece40e3fa92c777.png)
tty 设备发送数据的流程为:tty 核心从一个用户获取将要发送给一个 tty 设备的数据,tty 核心将数据传递给 tty 线路规程驱动,接着数据被传到 tty 驱动,tty 驱动将数据转换为可以发给硬件的格式。
接收数据的流程为:从 tty 硬件接收到的数据向上交给 tty 驱动,接着进入 tty 线路规程驱动,再进入 tty 核心,在这里它被一个用户获取。
tty core 是 linux kernel 提供的,serial_driver 才是我们常说的串口驱动。
![[图片]](https://img-blog.csdnimg.cn/direct/9334708a09a64d33bcc88e54ad742c3a.png)
由于输入输出不是一个设备,所以这里最底层只有 write,没有 read 函数,数据需要 push 上去。
6、vfs_caches_init
虚拟文件系统初始化,比如 sysfs,根文件系统等,就是在这一步进行挂载,proc 是内核虚拟的,用来输出内核数据结构信息,不算在这里。
vfs 虚拟文件系统,屏蔽了底层硬件的不同,提供了统一了接口,方便系统的移植和使用。使用户在不用更改应用代码的情况下直接移植代码到其他平台。
linux4.14/fs/dcache.c
void __init vfs_caches_init(void)
{names_cachep = kmem_cache_create("names_cache", PATH_MAX, 0,SLAB_HWCACHE_ALIGN|SLAB_PANIC, NULL);dcache_init();inode_init();files_init();files_maxfiles_init();mnt_init();bdev_cache_init();chrdev_init();
}
这里的挂载主要在 mnt_init() 函数中:
linux4.14/fs/namespace.c
void __init mnt_init(void)
{int err;mnt_cache = kmem_cache_create("mnt_cache", sizeof(struct mount),0, SLAB_HWCACHE_ALIGN | SLAB_PANIC, NULL);mount_hashtable = alloc_large_system_hash("Mount-cache",sizeof(struct hlist_head),mhash_entries, 19,HASH_ZERO,&m_hash_shift, &m_hash_mask, 0, 0);mountpoint_hashtable = alloc_large_system_hash("Mountpoint-cache",sizeof(struct hlist_head),mphash_entries, 19,HASH_ZERO,&mp_hash_shift, &mp_hash_mask, 0, 0);if (!mount_hashtable || !mountpoint_hashtable)panic("Failed to allocate mount hash table\n");kernfs_init();err = sysfs_init();if (err)printk(KERN_WARNING "%s: sysfs_init error: %d\n",__func__, err);fs_kobj = kobject_create_and_add("fs", NULL);if (!fs_kobj)printk(KERN_WARNING "%s: kobj create error\n", __func__);init_rootfs();init_mount_tree();
}
虚拟文件系统有几百个,常用的有三个:
sysfs:/sys 目录下,主要用来反馈【驱动】信息。
procfs:/proc 目录下,主要用来【反馈】内核数据结构和进程信息。
debugfs:挂载在 /sys/kernel/debug,主要用来 debug。
这三个文件系统创建文件夹和文件的函数都不一样,需要区分。
7、rest_init
这个函数可以算是 start_kernel 函数调用的最后一个函数,在这里产生了最重要的两个内核线程 kernel_init 和 kthreadd,kernel_init 后面会从内核空间跳转到用户空间,变成用户空间的 init 进程,PID=1,而 kthreadd ,PID=2,是内核进程,专门用来监听创建内核进程的请求,它维护了一个链表,如果有创建内核进程的需求,就会在链表上创建。
至此,用户空间最重要的 init 进程已经出来,后面用户空间的进程都由 init 进程来 fork。如果是安卓系统,init 进程会 fork 出一个 zygote 进程,他是所有安卓系统进程的父进程。
linux4.14/init.main.c
static noinline void __ref rest_init(void)
{struct task_struct *tsk;int pid;rcu_scheduler_starting();pid = kernel_thread(kernel_init, NULL, CLONE_FS);rcu_read_lock();tsk = find_task_by_pid_ns(pid, &init_pid_ns);set_cpus_allowed_ptr(tsk, cpumask_of(smp_processor_id()));rcu_read_unlock();numa_default_policy();pid = kernel_thread(kthreadd, NULL, CLONE_FS | CLONE_FILES);rcu_read_lock();kthreadd_task = find_task_by_pid_ns(pid, &init_pid_ns);rcu_read_unlock();system_state = SYSTEM_SCHEDULING;complete(&kthreadd_done);/** The boot idle thread must execute schedule()* at least once to get things moving:*/schedule_preempt_disabled();/* Call into cpu_idle with preempt disabled */cpu_startup_entry(CPUHP_ONLINE);
}
第 8 行创建了 kernel_init 进程,第 16 行创建了 kthreadd 进程,这两个都是内核进程。23 行通知 kernel_init 进程 kthreadd 已经创建完毕。也就是说,实际上是 kthreadd 先运行,kernel_init 再运行。
8、kernel_init
kernel4.14/init/main.c
static int __ref kernel_init(void *unused)
{int ret;kernel_init_freeable();async_synchronize_full();ftrace_free_init_mem();free_initmem();mark_readonly();system_state = SYSTEM_RUNNING;numa_default_policy();rcu_end_inkernel_boot();if (ramdisk_execute_command) {ret = run_init_process(ramdisk_execute_command);if (!ret)return 0;pr_err("Failed to execute %s (error %d)\n",ramdisk_execute_command, ret);}if (execute_command) {ret = run_init_process(execute_command);if (!ret)return 0;panic("Requested init %s failed (error %d).",execute_command, ret);}if (!try_to_run_init_process("/sbin/init") ||!try_to_run_init_process("/etc/init") ||!try_to_run_init_process("/bin/init") ||!try_to_run_init_process("/bin/sh"))return 0;panic("No working init found. Try passing init= option to kernel. ""See Linux Documentation/admin-guide/init.rst for guidance.");
}
10 行:设置系统为运行状态。
16 行:运行 init 进程,如果根目录没找到 /init,就从 30-33 行的目录去找,如果还找不到,系统就启动失败了。
9、kthreadd
kernel4.14/kernel/kthread.c
int kthreadd(void *unused)
{struct task_struct *tsk = current;/* Setup a clean context for our children to inherit. */set_task_comm(tsk, "kthreadd");ignore_signals(tsk);set_cpus_allowed_ptr(tsk, cpu_all_mask);set_mems_allowed(node_states[N_MEMORY]);current->flags |= PF_NOFREEZE;cgroup_init_kthreadd();for (;;) {set_current_state(TASK_INTERRUPTIBLE);if (list_empty(&kthread_create_list))schedule();__set_current_state(TASK_RUNNING);spin_lock(&kthread_create_lock);while (!list_empty(&kthread_create_list)) {struct kthread_create_info *create;create = list_entry(kthread_create_list.next,struct kthread_create_info, list);list_del_init(&create->list);spin_unlock(&kthread_create_lock);create_kthread(create);spin_lock(&kthread_create_lock);}spin_unlock(&kthread_create_lock);}return 0;
}
16 行:kthread_create_list 判断这个链表是否为空,不为空说明有人申请创建内核线程,开始创建。如果为空就被调度去休眠。
18 行:如果不为空,设置为运行态。
20 行:上锁,在内核做事情必须时刻注意并发。
24 行:获取需要创建线程的信息。
27 行:解锁。也就是获取信息的时候需要加锁。
29 行:创建内核线程。
31 行:加锁。
也就是在 while 循环中,获取完信息先解锁,创建内核线程后加锁。在 while 循环外部,有一个加锁和解锁的操作,这样加锁解锁刚好匹配。
其余的函数大家可以参照下面的文章去理解:
https://www.cnblogs.com/andyfly/p/9410441.html
https://www.cnblogs.com/lifexy/p/7366782.html
5、Android 启动流程
Andorid 系统是在嵌入式行业中广泛应用的系统,手机、平板、机器人、汽车中控系统都有使用安卓系统的,在应用方面的优势是安卓系统自带 UI,使用 Linux 需要自己用 QT 开发界面,并且界面没那么好看。
Android 系统架构图:
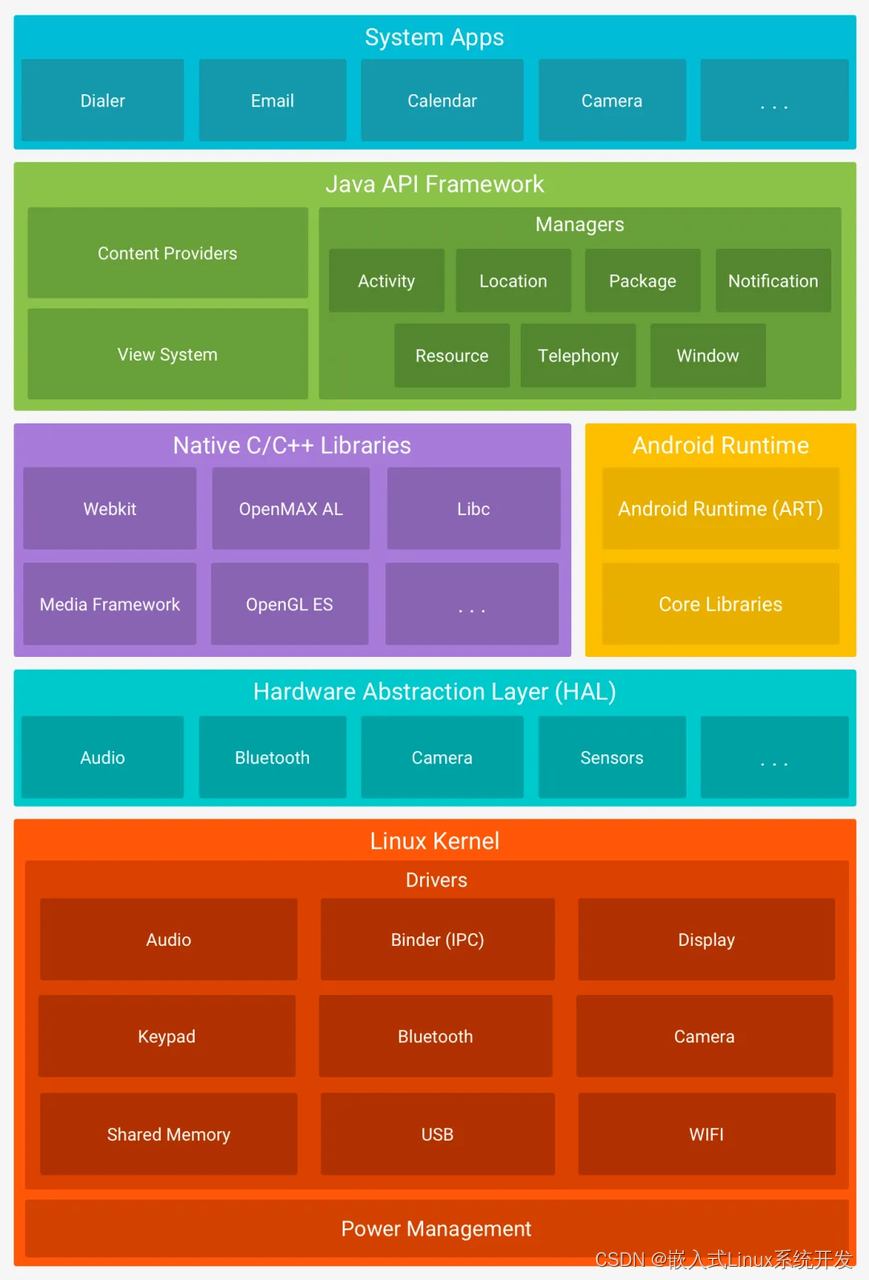
由此图可知,Android 系统基于 Linux 内核。
Android 系统启动流程如下:
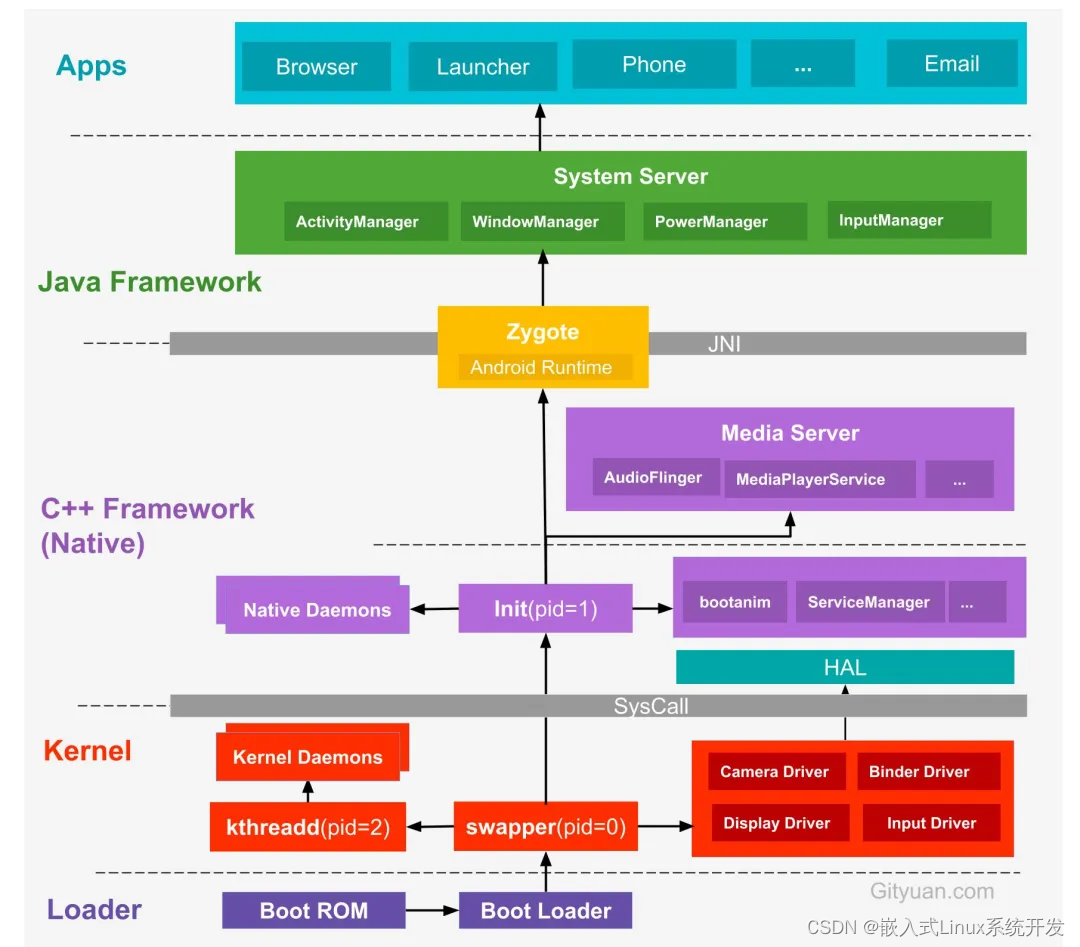
- Boot ROM 是固化在硬件中的一段代码,它一般是固定的,它的作用是检测基本的硬件是否存在,比如检测 EMMC 是否存在,存在的话,把 bootloader 从 EMMC 拷贝到 SRAM ,启动系统,后面交给 bootloader 。
- Andorid 系统的启动引导程序 bootloader 不是 uboot,是 LK(little kernel),专门用来启动安卓系统。
- bootloader 初始化完成后跳转到 Linux 内核的 start_kernel 函数,此函数最后产生了 kernel_init 和 kthreadd,kernel_init 后面会从内核空间跳转到用户空间,变成用户空间的 init 进程,PID=1,而 kthreadd(PID=2)是内核进程,专门用来监听创建内核进程的请求,它维护了一个链表,如果有创建内核进程的需求,就会在链表上创建。当然你可以看到图中还有一个swapper(PID=0)进程,它是系统中唯一一个不使用 fork 创建的进程,kernel_init 和 kthreadd 就是由它创建的,swapper 也叫 idle 进程,空闲进程,它运行的时候就是系统处于空闲状态的时候。
- 当 kernel_init 转变为用户空间的 init 进程以后,会在 Andorid 系统中创建一个最重要的进程:Zygote,此进程会创建安卓所需要的所有进程。
1)Android 层级分析
这个图中 kernel 和 native 层的通信是 syscall,这个大家都很熟悉,就是系统调用,毕竟 C++ 调用 C 语言还是很简单的。
而 FrameWork 层和 Native 层通信就比较复杂了,java 如何调用 C++ 语言,这里会有一个 JNI 机制,JNI 有特定的语法,类似于 C 语言但又不是 C 语言,他可以实现 java 调用 C++的函数,这个过程需要 Android Runtime(ART) 安卓虚拟机的配合。
在 Native 层中,有很多 C++ 写的系统服务,供上层使用,比如最重要的ServiceManager,管理所有其他服务的服务。
2)调用实例分析
手机 app 想要控制喇叭、LED 等硬件,要从 app 传递到 kernel,操作硬件,这个流程要比 Linux 的应用程序复杂得多。并且方式不止一种,举例:
- app 通过直接读写 kernel 节点,向其写入数据,这就类似于在 Linux 命令行直接 echo,这是最简单的方式。因为 java 本身也有文件读写函数,有按字节读写和字符串读写两种方式。
- app 的 java 语言调用 JNI 文件,JNI 调用 C 语言,在 C 函数中去操作节点。
- 也可以用 C++ 写一个 Native 服务,APP 通过 binder 通信访问这个服务,在这个服务中操作节点。当然 socket 通信也可以。
3)Android 权限问题
以上所有的操作都需要权限,安卓系统的权限限制的比较严格,防止黑客破解。
如果你有 root 权限,那么你可以在安卓系统命令行中输入 setenforce 0 来关闭 Android 系统的 SELinux 检查机制,那基本上你所有操作都可以被允许。
Linux 系统安全机制是:我是 root,我派出去的程序访问任何东西也应该是 root 权限,没有人可以阻止我。
Andorid 系统安全机制是:不管你是谁,做任何事情都要提前申请,否则会被 SELinux 检查,没有提前申请的行为都会被拒绝,看 log 会发现很多 avc deny。
举个形象一点的例子:一个公司老板,派他的儿子去自己的公司上班,按理来说是应该类似于 root 权限,谁能挡我?实际上呢,到公司上班可以,因为老板提前说了,但是去卫生间要申请权限,用电脑要申请权限,用打印机要申请权限,除了过来上班,其余任何没有提前说明的行为都会被拒绝。
这就是 Andorid 系统严格的安全机制,防止了黑客破解 root 权限以后乱搞你的手机,比如:内置一个程序,定期访问你的 xxx 文件,然后通过网络发出去。
6、Linux 驱动加载顺序分析
从上文可以得出,start_kernel 函数最后调用的是 rest_init 函数,其实 rest_init 函数不光产生了最重要的 kernel_init (PID=1)和 kthreadd (PID=2)内核进程。
kernel_init 最后演变为用户空间 init 进程(PID=1)。
rest_init 函数还有一个重要的分支:加载驱动模块,调用流程如下:
start_kernel|--->rest_init |--->kernel_init|--->kernel_init_freeable|--->do_basic_setup|--->driver_init|--->do_initcalls|--->do_initcall_level|--->do_one_initcall
注意,这里就是驱动的初始化和驱动模块的加载。
我们知道在 rest_init 函数中,最重要的 1 号进程和 2 号进程都已经起来了,也就是说系统已经真正起来了。1 号 2 号进程起来之前,文件系统的挂载是在调用 rest_init 函数之前就挂载好了,此时加载驱动是可以的。
那么这里是如何挂载的呢?
流程中 driver_init 函数会对各个驱动入口函数进行初始化,也就是在内存中对驱动初始化函数进行寻址。而 do_initcalls 函数中,会按照驱动的优先级,对驱动一个一个进行挂载。
linux4.14/init/main.c
![[图片]](https://img-blog.csdnimg.cn/direct/5703f34de88849c781a74fc445c8ba56.png)
![[图片]](https://img-blog.csdnimg.cn/direct/5aea533a34d7466db80dad1febd1ee04.png)
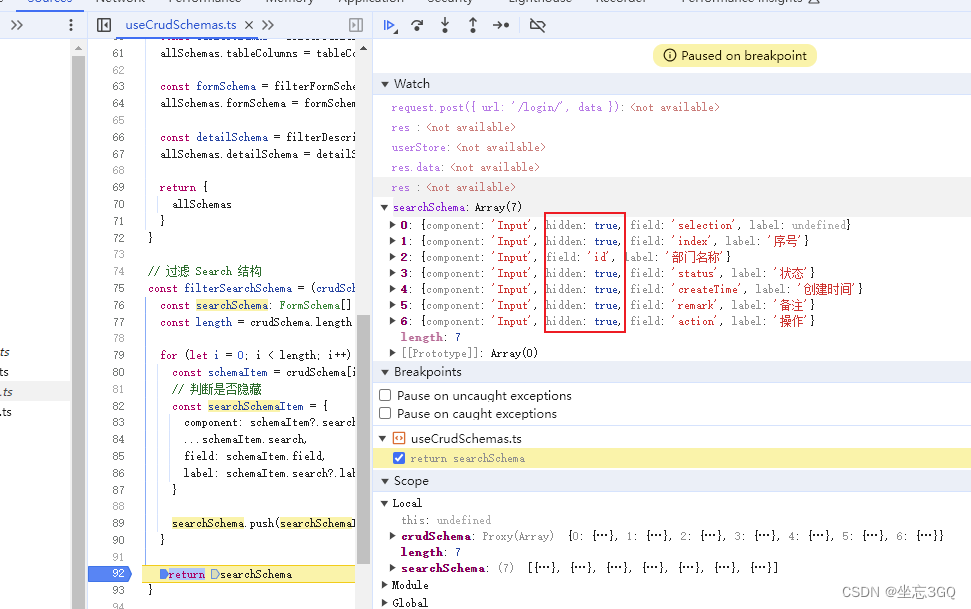
驱动的优先级:Linux 把系统中需要挂载的各种东西,都分为14个等级,分别为 1–1s–2–2s–3–3s–4–4s–5–5s–6–6s–7–7s,数字越小优先级越高,定义在:
linux4.14/include/linux/init.h
![[图片]](https://img-blog.csdnimg.cn/direct/af3d4f5f423b4594ba4e40b0dfd4b9b1.png)
一般我们自己写的驱动模块,文件最后会声明一个 module_init 和 module_exit ,实际上被定义为 device_initcall,优先级为6,是要比架构初始化模块和文件系统模块优先级低。
如果驱动模块之间有依赖,需要更改模块挂载顺序,有三种方式:
- 增加一个优先级,比如 8。或者把自己的驱动模块声明成其他优先级,也就是不用 module_init 去声明,可以用 fs_initcall 去声明。
- 对于同一优先级的驱动模块,可以在 Makefile 中更改其编译和链接的顺序,就会切换其挂载的顺序。(静态编译)
- 动态加载驱动模块:等 Linux 系统起来以后,手动执行 insmod 和 rmmod 即可挂载和卸载驱动,顺序自己决定。测试成功后,再搞到内核中静态编译。
虽然可以更改挂载顺序,但还是希望大家写驱动模块的时候,能够做到高内聚、低耦合,自己的模块最好不要依赖其他模块,防止其他模块加载失败导致自己的模块不可用。
如何看驱动挂载顺序?有两种方式:
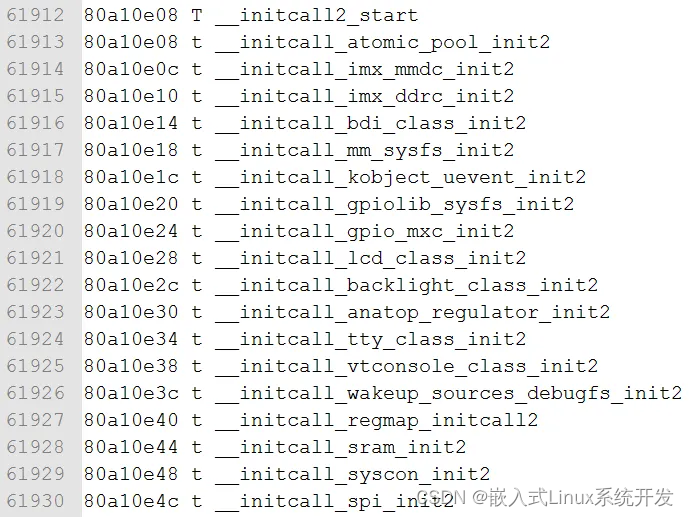
1、找到编译后的 Linux 内核源码,根目录下面有个 System.map 文件,这里记载了 Linux 内核所做的所有的事情,是按顺序记载的(也有可能在其他输出目录)。
一共有三列:地址、区域、操作。在操作中我们可以看到我们声明的驱动的名字。
2、如果你驱动模块有加一些打印,可以直接看 log。
7、initcall 机制
普通我们写一个程序,想要它被调用,需要在主流程中调用这个函数,才算被调用。
那么这种方式如果放在 Linux 中,是难以想象的,我们自己写的代码要在多少个地方声明。
而你如果采用 initcall 机制,意思就是说,你使用一个字符串声明你的驱动初始化函数,那么所有的驱动初始化函数都存在内存中一个连续的段中,系统启动以后,会从这个段的第一个函数开始,一个一个遍历,进而一个一个调用,这就是 initcall 机制。这就是为什么我们写驱动只需要使用 module_init 声明,编译进去即可自动被调用的原因!
8、System.map
编译后的内核根目录 System.map 文件记载了所有的驱动加载顺序,如果你不确定驱动的加载顺序,在这里查看就可以,每次编译 Linux 内核就会产生一个新的 System.map。