Open3D (C++) 点云旋转至主成分空间

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/365432.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

CAM350怎么添加文字?
CAM350怎么添加文字?
CAM350只能修改用CAM350本身做的文字,其它软件生成的GERBER文件导入到CAM350会默认为线条,没办法修改。 如果想添加文字,先把原先的文字删除。然后在CAM350里面重新添加文字就可以了。 操作方法如下…

Java代码生成器(开源版本)
一、在线地址
Java在线代码生成器:在线访问
二、页面截图 三、核心功能
支持Mybatis、MybatisPlus、Jpa代码生成使用 antlr4 解析SQL语句,保证了SQL解析的成功率支持自定义包名、作者名信息支持自定义方法名、接口地址支持自定义选择是否生成某个方法…

力扣 单链表元素删除解析及高频面试题
目录
删除元素的万能方法
构造虚拟头结点来应对删除链表头结点的情况
一、203.移除链表元素
题目
题解 二、19.删除链表中倒数第K个节点
题目
题解
三、
83.删除某个升序链表中的重复元素,使重复的元素都只出现一次
题目
题解
82.删除某个升序链表中的…

mongodb在windows环境安装部署
一、mongodb
1.释义
MongoDB 是一种开源的文档型 NoSQL 数据库管理系统,使用 C 编写,旨在实现高性能、高可靠性和易扩展性。MongoDB 采用了面向文档的数据模型,数据以 JSON 风格的 BSON(Binary JSON)文档存储&#x…
第一周:李宏毅机器学习笔记
第一周学习周报 摘要一、机器学习基础理论1. 什么是机器学习?2. 机器学习“寻找”的函数有哪些类型?3. 机器学习中机器如何“寻找”函数?三步走3.1 第一步:设定函数的未知量(Function with Unknown Parameters…
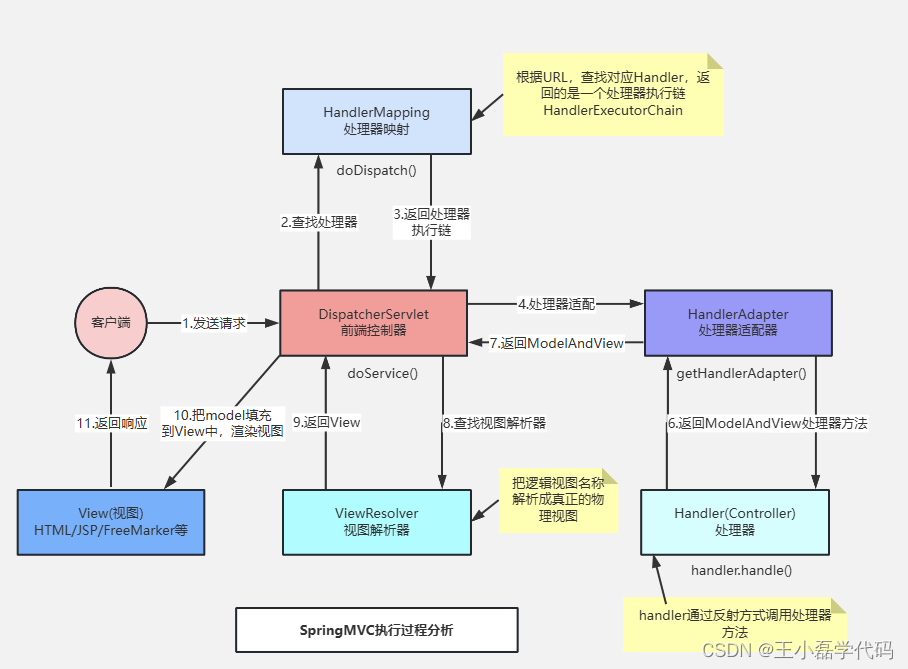
SpringMvc 执行原理
当用户请求 会发送到前端控制器,DisptcherServlet根据请求参数生成代理请求,找到对应的实际控制器,控制器处理请求,创建数据模型,访问数据库,将模型响应给中心控制器,控制器使用模型与视图渲染视…
09_计算机网络模型
目录 OSI/RM七层模型
OSI/RM七层模型
各层介绍及硬件设备
传输介质
TCP/IP协议簇
网络层协议
传输层协议
应用层协议
完整URL的组成
IP地址表示与计算
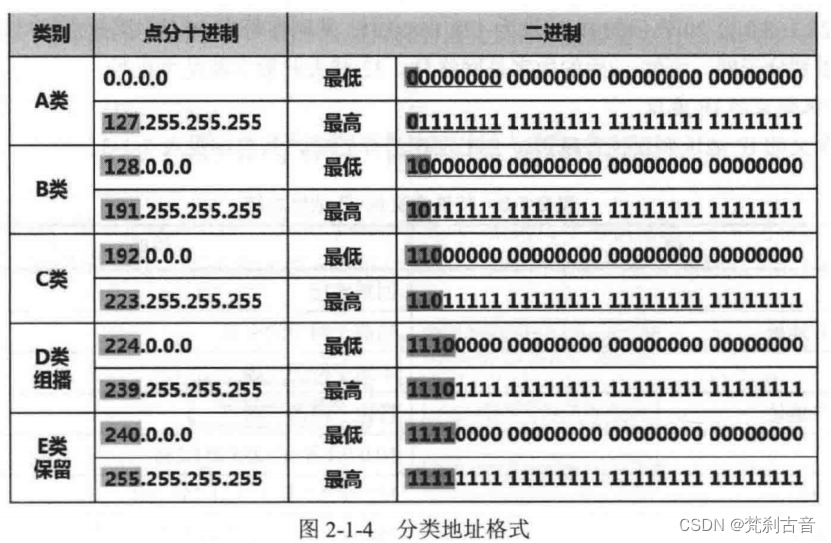
分类地址格式
子网划分和超网聚合
无分类编址
特殊含义的IP地址
IPv6协议
过渡技术 OSI/RM七层模型 OSI/RM七…
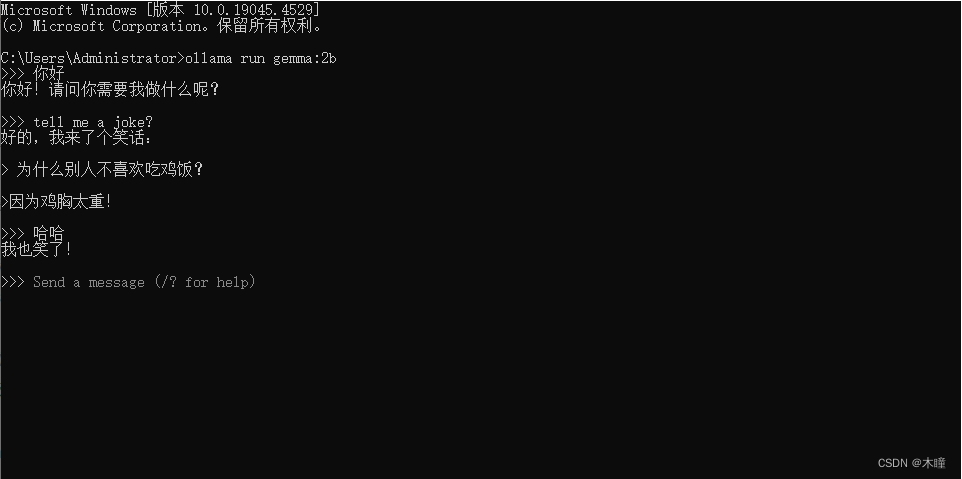
⭐Ollama的本地安装⚡
先来逛一下咱们的主角Ollama的官网地址:
Ollama
大概长这个样子🤔 因为本地系统的原因,文章只提供Widows的安装方式,使用Linux和Mac的大佬,可以自行摸索🧐 下载完成后就是安装了🍕,…

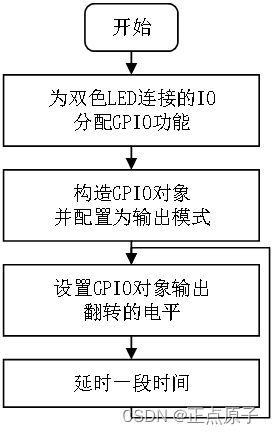
【正点原子K210连载】 第十二章 跑马灯实验 摘自【正点原子】DNK210使用指南-CanMV版指南
1)实验平台:正点原子ATK-DNK210开发板 2)平台购买地址https://detail.tmall.com/item.htm?id731866264428 3)全套实验源码手册视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十二章 跑马灯实验…

解题思路:LeetCode 第 209 题 “Minimum Size Subarray Sum“
解题思路:LeetCode 第 209 题 “Minimum Size Subarray Sum”
在这篇博文中,我们将探讨如何使用 Swift 解决 LeetCode 第 209 题 “Minimum Size Subarray Sum”。我们会讨论两种方法:暴力法和滑动窗口法,并对这两种方法的时间复…
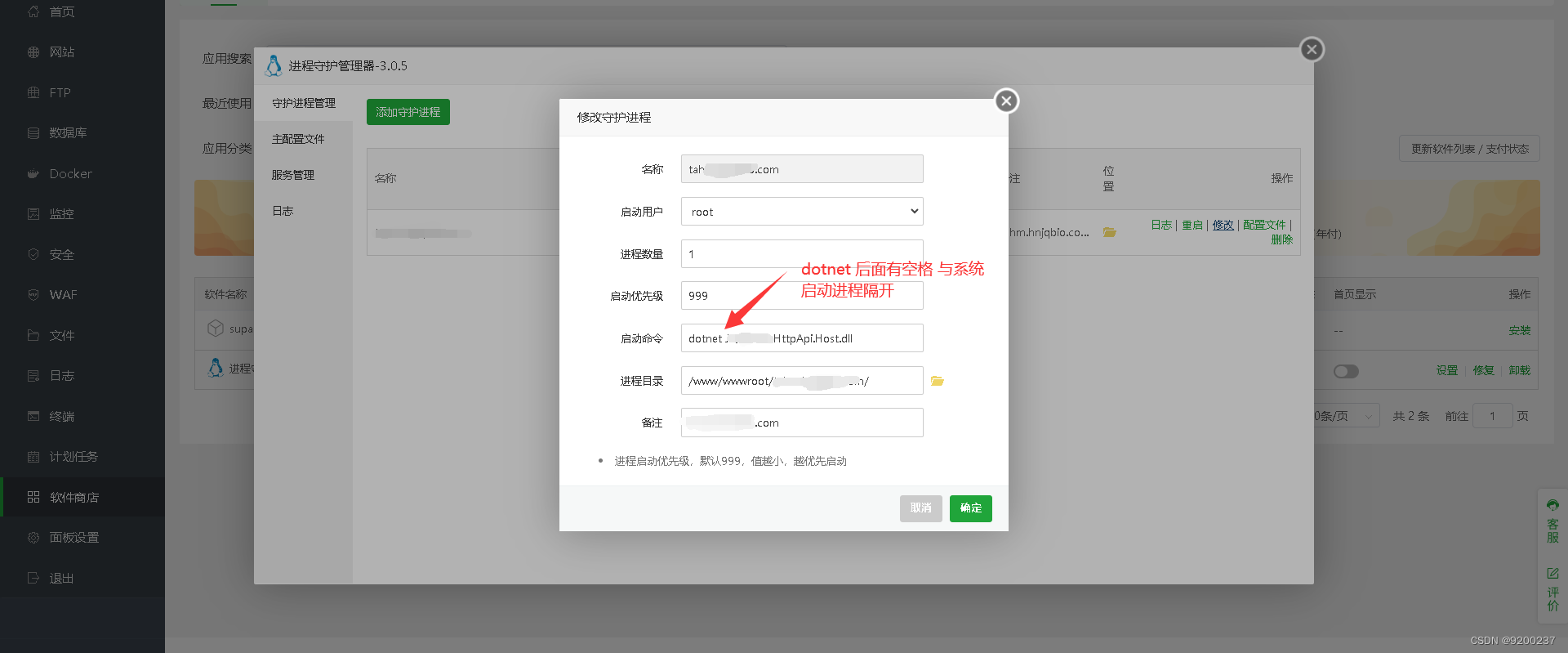
阿里云centos 7.9 使用宝塔面板部署.netcore 6.0
前言: 在做工作之前之前,如果你的服务器有数据盘,而且又没挂载,但是你想使用数据盘做为工作目录,建议跳转到下面这个链接先挂载数据盘,并到数据盘创建好目录,修改站点工作目录到数据盘的目录&am…

骑行十里箐:风景,挑战与心灵,在幽谷中的协奏曲
2024年6月29日,星期六,一个看似平凡的日子,却因一次不同寻常的骑行而变得难以忘怀。作为校长骑行群的一员,我有幸参加了这次骑行十里箐的活动。从滇池后海的宁静开始,到宝珠山顶的壮观落幕,这一天的旅程充满…

JFreeChart 生成Word图表
文章目录 1 思路1.1 概述1.2 支持的图表类型1.3 特性 2 准备模板3 导入依赖4 图表生成工具类 ChartWithChineseExample步骤 1: 准备字体文件步骤 2: 注册字体到FontFactory步骤 3: 设置图表具体位置的字体柱状图:饼图:折线图:完整代码&#x…

Quectel EM05-CE 模块测试
作者简介: 一个平凡而乐于分享的小比特,中南民族大学通信工程专业研究生在读,研究方向无线联邦学习 擅长领域:驱动开发,嵌入式软件开发,BSP开发 作者主页:一个平凡而乐于分享的小比特的个人主页…

AI绘画:探索人工智能与艺术的奇妙结合
前言
人工智能技术的不断发展,使得AI绘画逐渐成为艺术领域的新宠。AI绘画是指利用人工智能算法进行绘画创作的一种艺术形式,它可以模拟人类艺术家的创作过程,创造出各种独特的艺术作品。 突破传统艺术的极限:AI绘画的无限可能性 …

每日一题---OJ题:分隔链表
片头
嗨!小伙伴们,大家好!今天我们一起来看看这道题----分隔链表 emmmm,这道题,看描述应该不算太难,我们一起来画一画图呗! 题目读懂了,那么如何破解这道题呢? 思路&…

探索PcapPlusPlus开源库:网络数据包处理与性能优化
文章目录 0. 本文概要1. PcapPlusPlus介绍1.1 概述1.2主要特性和功能1.3 PcapPlusPlus 主要模块关系和依赖1.4 网络协议层处理过程 2. 实例2.1 基于 PcapPlusPlus 的应用程序设计和封装流程:2.2 多线程示例代码2.3 代码说明: 3. 程序性能进一步优化3.1 避…
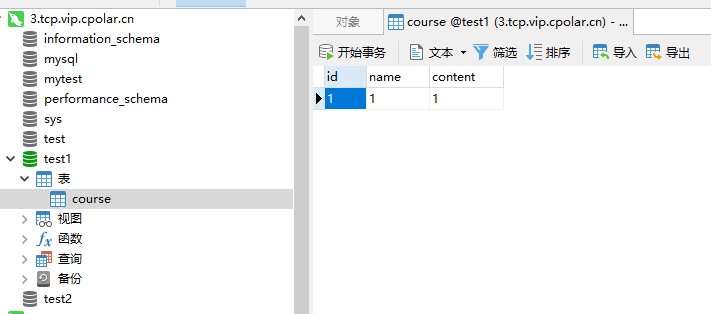
linux虚拟机部署的MySQL如何使用外网访问?教你轻松使用cpolar在centos搭建内网穿透
文章目录 写在前面实现Linux的内网穿透1、官网账号注册2、在Linux部署我们自己的项目3、一键自动下载安装cpolar4、设置自己的token5、启动cpolar服务6、MySQL穿透测试 卸载方法 写在前面
相信很多小伙伴在本地搭建了一个MySQL数据库,想让其他同事或者合作者一起使…
推荐文章
- 婚礼准备程序
- iOS上架App Store的全攻略
- Kotlin中的?.和!!主要区别
- (3)、SpringCache源码分析
- (delphi11最新学习资料) Object Pascal 学习笔记---第3章第4节(For循环语句)
- (Qt5Gui.dll)处(位于 xxx.exe 中)引发的异常: 0xC0000005: 读取位置 XXXXXXXX 时发生访问冲突
- (undone) 阅读 MapReduce 论文笔记
- (笔记自用)LeetCode:快乐数
- (二)ffmpeg 下载安装以及拉流推流示例
- (离散数学)逻辑连接词
- (软件测试文档大全)测试计划,测试报告,测试方案,压力测试报告,性能测试,等保测评,安全扫描测试,日常运维检查测试,功能测试等全下载
- (三)Linux中卸载docker(非常详细)