一、任务要求
1. 学习I2C总线通信协议,使用STM32F103完成基于I2C协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。
任务要求:
1)解释什么是“软件I2C”和“硬件I2C”?(阅读野火配套教材的第23章“I2C--读写EEPROM”原理章节)
2)阅读AHT20数据手册,编程实现:每隔2秒钟采集一次温湿度数据,显示到OLED上,同时通过串口发送到上位机的“串口助手”软件。
二、了解I2C总线通信协议
(一)什么是I2C协议
I2C总线协议是一种串行通信协议,由Philips公司(现在的NXP半导体)于1982年开发,用于微控制器与外部设备(如传感器、存储器等)之间的通信,没有严格的波特率要求,实现简单,可扩展性强。
2.设备角色
在I2C通信中,设备可以扮演两种角色:
(1)主设备(Master):控制总线上的所有通信,发起数据传输的设备。
(2)从设备(Slave):响应主设备的指令,接收或发送数据的设备。
3.数据传输
数据在I2C总线上传输时,一次传输包括以下步骤:
(1)起始条件(Start Condition):主设备发出一个特定的起始信号,标志着数据传输的开始。
(2)地址+读写位(Address + Read/Write Bit):主设备发送目标从设备的地址,同时指定是读取还是写入操作。
(3)数据传输(Data Transfer):根据主设备发送的读写位,数据可以从主设备传输到从设备,或者从从设备传输到主设备。
(4)应答(Acknowledge):每个数据字节传输后,接收设备都会发送应答信号,以确认数据的接收。
(5)停止条件(Stop Condition):主设备发出停止信号,表示传输结束。
4.时序特性
I2C通信的时序特性包括:
(1)时钟频率(Clock Frequency):确定数据传输的速率。
(2)数据位数(Data Bits):每个数据字节通常是8位。
(3)传输模式(Transmission Mode):可以是标准模式(100 kbit/s)、快速模式(400 kbit/s)、高速模式(3.4 Mbit/s)等不同速率。
(二)I2C协议的物理层和协议层
物理层:
I2C总线由两根线构成:
(1)Serial Data Line (SDA):串行数据线,用于实际的数据传输。
它可以由上拉电阻拉高,以及由任何连接在总线上的设备拉低,形成开漏或者三态输出。
(2)Serial Clock Line (SCL):串行时钟线,用于同步数据传输。
·时钟信号由主设备(通常是微控制器)生成,控制数据的传输速率。
·它也可以由上拉电阻拉高,以及由任何连接在总线上的设备拉低。

协议层:
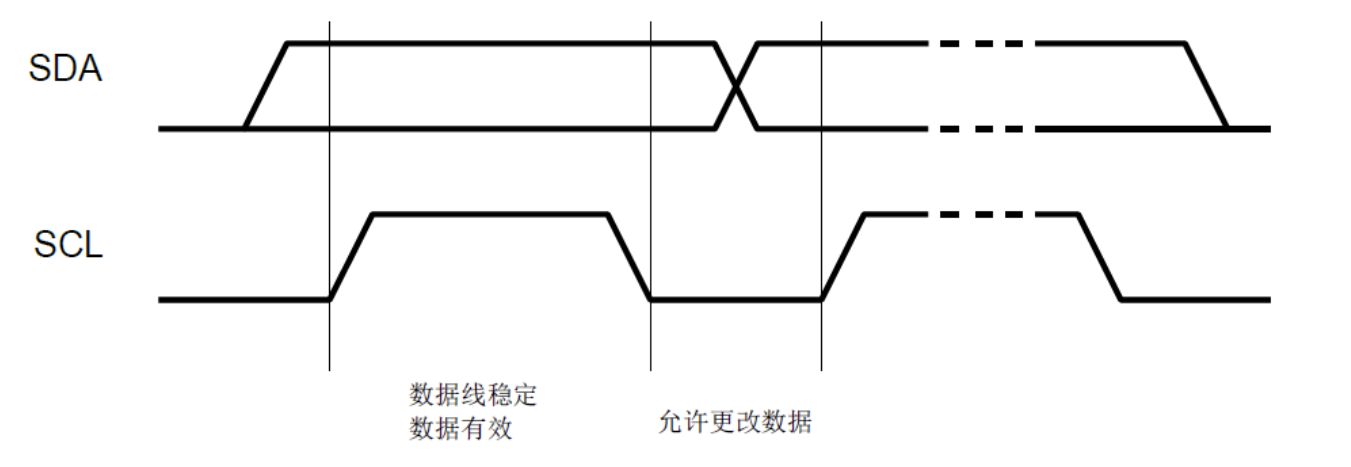
1.起始和停止条件:
在起始条件产生后,总线处于忙状态,由本次数据传输的主从设备独占,其他I2C器件无法访问总线;而在停止条件产生后,本次数据传输的主从设备将释放总线,总线再次处于空闲状态。

SDA线受到SCL线影响,可以看到只有当SCL处于高电平时,SDA线传输的数据才有效
(1)SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据(开始)。
(2)SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据(结束)。
(3)每传送一个字节后,接收设备会发送一个应答位,以确认数据的接收(应答)。
2.地址和数据传输:
(1)每个I2C设备都有一个唯一的7位或10位地址。
(2)传输数据时,先发送设备地址和读/写位来选择目标设备。
(3)数据以8位字节的形式传输,每个字节后面跟随一个确认位。
3.时钟频率:
(1)I2C支持多种时钟频率,包括:
标准模式(100 kbit/s)、快速模式(400 kbit/s)、高速模式 (3.4 Mbit/s)
(2)时钟频率由主设备控制,在总线上设置以控制数据传输速率。
4.数据传输顺序:
数据传输是按照先发送地址,然后发送数据(或接收数据)的顺序进行的。
(三)硬件I2C和软件I2C
硬件I2C和软件I2C各有其适用的场景和优劣势。硬件I2C提供了更高的性能和可靠性,适合需要快速数据传输和稳定操作的场合;而软件I2C则适合于资源受限、或者需要较低成本解决方案的应用,但通常牺牲了一些性能和实时性。选择合适的I2C实现方式取决于具体的应用需求和系统设计考量。
硬件I2C:
硬件I2C是指使用专门的硬件模块或者外设来实现I2C通信的方式。
1.硬件模块:
(1)微控制器或处理器内部集成了专用的硬件模块,用于生成和处理I2C总线的信号。
(2)这些硬件模块通常能够提供高精度的时钟信号、自动应答功能以及高速数据传输,因此在时间和资源敏感的应用中表现良好。
2.物理层实现:
使用硬件I2C时,物理层的连接通常简单可靠,通过连接SDA和SCL线到微控制器的专用引脚上。
软件I2C:
软件I2C是在没有硬件I2C模块的微控制器或者处理器上,通过编程实现的软件驱动方式。
1.GPIO控制:
(1)使用微控制器的通用输入输出(GPIO)引脚模拟实现I2C通信的时钟和数据线功能。
(2)通过编程控制GPIO引脚的状态变化,来模拟I2C总线上的信号传输。
2.实时性和精度:
(1)软件I2C通常比硬件I2C更慢,因为它依赖于处理器的时钟频率和软件实现的精度。
(2)实时性和时序控制较差,可能受到中断延迟、任务调度等因素的影响。
3.适用场景:
(1)在资源有限、或者需要在没有硬件支持的平台上实现I2C通信时使用。
(2)适合低速设备和不需要高频率通信的应用。
三、AHT20温湿度传感器
了解AHT20芯片的相关信息,具体信息请到官方下载对应产品介绍文档
资料链接:
软件下载-温湿度传感器 温湿度芯片 温湿度变送器模块 气体传感器 流量传感器 广州奥松电子股份有限公司![]() http://www.aosong.com/class-36.htmlAHT20是一种数字式温湿度传感器,具有高精度和低功耗的特点,适合用于各种环境监测和控制应用。以下是关于AHT20温湿度传感器的一些主要特点和特性:
http://www.aosong.com/class-36.htmlAHT20是一种数字式温湿度传感器,具有高精度和低功耗的特点,适合用于各种环境监测和控制应用。以下是关于AHT20温湿度传感器的一些主要特点和特性:
1.测量范围:
温度:-40°C 到 +85°C
湿度:0% RH 到 100% RH
2.精度:
温度精度:±0.3°C(在0°C 到 60°C 范围内)
湿度精度:±2% RH
3.工作电压:8.1.8V 到 3.6V 的宽电压工作范围
4.接口:支持标准的I2C接口(数据传输速率最高可达400 kbit/s)
5.响应时间:
温度测量响应时间约为30 ms
湿度测量响应时间约为5.5 s
实物图如下:

原理图如下:

仿真电路图如下:

特性和应用
1.高精度:AHT20提供较高的温度和湿度测量精度,使其适用于对环境参数精度要求较高的应用,如气象观测、环境监测等。
2.低功耗:低功耗设计使得AHT20非常适合于需要长期运行和电池寿命长的无线传感器网络(WSN)应用。
3.快速响应:尽管湿度测量响应时间较长,但温度测量的快速响应时间适合于需要快速变化监测的应用。
4.易于集成:通过标准的I2C接口和小型封装,AHT20可以方便地集成到各种电子设备和系统中,提供温湿度信息。
四、利用AHT20实现采集任务
(一)任务要求
阅读AHT20数据手册,编程实现:每隔2秒钟采集一次温湿度数据,显示到OLED上,同时通过串口发送到上位机的“串口助手”软件。
(二)代码
usart.c:
#include "sys.h"
#include "usart.h"#if SYSTEM_SUPPORT_UCOS
#include "includes.h"
#endif#if 1
#pragma import(__use_no_semihosting) struct __FILE
{ int handle; }; FILE __stdout; void _sys_exit(int x)
{ x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{ while((USART1->SR&0X40)==0);USART1->DR = (u8) ch; return ch;
}
#endif #if EN_USART1_RX u8 USART_RX_BUF[USART_REC_LEN]; u16 USART_RX_STA=0; void uart_init(u32 bound){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓGPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); USART_InitStructure.USART_BaudRate = bound;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_Cmd(USART1, ENABLE); }void USART1_IRQHandler(void) {u8 Res;
#ifdef OS_TICKS_PER_SEC OSIntEnter();
#endifif(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {Res =USART_ReceiveData(USART1);if((USART_RX_STA&0x8000)==0){if(USART_RX_STA&0x4000){if(Res!=0x0a)USART_RX_STA=0;else USART_RX_STA|=0x8000; }else { if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;} }} }
#ifdef OS_TICKS_PER_SEC OSIntExit();
#endif
}
#endif usart.h:
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h" #define USART_REC_LEN 200
#define EN_USART1_RX 1 extern u8 USART_RX_BUF[USART_REC_LEN];
extern u16 USART_RX_STA; void uart_init(u32 bound);
#endifsys.c:
#ifndef __BSP_I2C_H
#define __BSP_I2C_H#include "sys.h"
#include "delay.h"
#include "usart.h"#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA //IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅvoid IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endifsys.h:
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
// //STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/// //0,²»Ö§³Öucos
//1,Ö§³Öucos
#define SYSTEM_SUPPORT_UCOS 0 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖUCOS//λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ
//¾ßÌåʵÏÖ˼Ïë,²Î¿¼<<CM3ȨÍþÖ¸ÄÏ>>µÚÎåÕÂ(87Ò³~92Ò³).
//IO¿Ú²Ù×÷ºê¶¨Òå
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO¿ÚµØÖ·Ó³Éä
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08 //IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú!
//È·±£nµÄֵСÓÚ16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈëvoid NVIC_Configuration(void);#endifbsp_i2c.c:
#include "bsp_i2c.h"
#include "delay.h"uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;uint32_t H1=0;
uint32_t T1=0; uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};void IIC_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);IIC_SCL=1;IIC_SDA=1;}void IIC_Start(void)
{SDA_OUT(); IIC_SDA=1; IIC_SCL=1;delay_us(4);IIC_SDA=0;delay_us(4);IIC_SCL=0;
} void IIC_Stop(void)
{SDA_OUT();IIC_SCL=0;IIC_SDA=0;delay_us(4);IIC_SCL=1; IIC_SDA=1;delay_us(4);
}u8 IIC_Wait_Ack(void)
{u8 ucErrTime=0;SDA_IN(); IIC_SDA=1;delay_us(1); IIC_SCL=1;delay_us(1); while(READ_SDA){ucErrTime++;if(ucErrTime>250){IIC_Stop();return 1;}}IIC_SCL=0; return 0;
} void IIC_Ack(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=0;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
}void IIC_NAck(void)
{IIC_SCL=0;SDA_OUT();IIC_SDA=1;delay_us(2);IIC_SCL=1;delay_us(2);IIC_SCL=0;
} void IIC_Send_Byte(u8 txd)
{ u8 t; SDA_OUT(); IIC_SCL=0;for(t=0;t<8;t++){ IIC_SDA=(txd&0x80)>>7;txd<<=1; delay_us(2); IIC_SCL=1;delay_us(2); IIC_SCL=0; delay_us(2);}
} u8 IIC_Read_Byte(unsigned char ack)
{unsigned char i,receive=0;SDA_IN();for(i=0;i<8;i++ ){IIC_SCL=0; delay_us(2);IIC_SCL=1;receive<<=1;if(READ_SDA)receive++; delay_us(1); } if (!ack)IIC_NAck();elseIIC_Ack(); return receive;
}void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{IIC_Start(); if(device_addr==0xA0) IIC_Send_Byte(0xA0 + ((addr/256)<<1));elseIIC_Send_Byte(device_addr); IIC_Wait_Ack(); IIC_Send_Byte(addr&0xFF); IIC_Wait_Ack(); IIC_Send_Byte(data); IIC_Wait_Ack(); IIC_Stop();if(device_addr==0xA0) //delay_ms(10);elsedelay_us(2);
}uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead)
{ uint16_t data;IIC_Start(); if(device_addr==0xA0)IIC_Send_Byte(0xA0 + ((addr/256)<<1));elseIIC_Send_Byte(device_addr); IIC_Wait_Ack();IIC_Send_Byte(addr&0xFF); IIC_Wait_Ack(); IIC_Start(); IIC_Send_Byte(device_addr+1); IIC_Wait_Ack();if(ByteNumToRead == 1){data=IIC_Read_Byte(0);}else{data=IIC_Read_Byte(1);data=(data<<8)+IIC_Read_Byte(0);}IIC_Stop(); return data;
}void read_AHT20_once(void)
{delay_ms(10);reset_AHT20();delay_ms(10);init_AHT20();delay_ms(10);startMeasure_AHT20();delay_ms(80);read_AHT20();delay_ms(5);
}void reset_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("1");else printf("1-n-");I2C_WriteByte(0xBA);ack_status = Receive_ACK();if(ack_status) printf("2");else printf("2-n-");I2C_Stop();}void init_AHT20(void)
{I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("3");else printf("3-n-"); I2C_WriteByte(0xE1);ack_status = Receive_ACK();if(ack_status) printf("4");else printf("4-n-");I2C_WriteByte(0x08);ack_status = Receive_ACK();if(ack_status) printf("5");else printf("5-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) printf("6");else printf("6-n-");I2C_Stop();
}void startMeasure_AHT20(void)
{//------------I2C_Start();I2C_WriteByte(0x70);ack_status = Receive_ACK();if(ack_status) printf("7");else printf("7-n-");I2C_WriteByte(0xAC);ack_status = Receive_ACK();if(ack_status) printf("8");else printf("8-n-");I2C_WriteByte(0x33);ack_status = Receive_ACK();if(ack_status) printf("9");else printf("9-n-");I2C_WriteByte(0x00);ack_status = Receive_ACK();if(ack_status) printf("10");else printf("10-n-");I2C_Stop();
}void read_AHT20(void)
{uint8_t i;for(i=0; i<6; i++){readByte[i]=0;}//-------------I2C_Start();I2C_WriteByte(0x71);ack_status = Receive_ACK();readByte[0]= I2C_ReadByte();Send_ACK();readByte[1]= I2C_ReadByte();Send_ACK();readByte[2]= I2C_ReadByte();Send_ACK();readByte[3]= I2C_ReadByte();Send_ACK();readByte[4]= I2C_ReadByte();Send_ACK();readByte[5]= I2C_ReadByte();SendNot_Ack();I2C_Stop();//--------------if( (readByte[0] & 0x68) == 0x08 ){H1 = readByte[1];H1 = (H1<<8) | readByte[2];H1 = (H1<<8) | readByte[3];H1 = H1>>4;H1 = (H1*1000)/1024/1024;T1 = readByte[3];T1 = T1 & 0x0000000F;T1 = (T1<<8) | readByte[4];T1 = (T1<<8) | readByte[5];T1 = (T1*2000)/1024/1024 - 500;AHT20_OutData[0] = (H1>>8) & 0x000000FF;AHT20_OutData[1] = H1 & 0x000000FF;AHT20_OutData[2] = (T1>>8) & 0x000000FF;AHT20_OutData[3] = T1 & 0x000000FF;}else{AHT20_OutData[0] = 0xFF;AHT20_OutData[1] = 0xFF;AHT20_OutData[2] = 0xFF;AHT20_OutData[3] = 0xFF;printf("ʧ°ÜÁË");}printf("\r\n");printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);printf("\r\n");
}uint8_t Receive_ACK(void)
{uint8_t result=0;uint8_t cnt=0;IIC_SCL = 0;SDA_IN(); delay_us(4);IIC_SCL = 1;delay_us(4);while(READ_SDA && (cnt<100)){cnt++;}IIC_SCL = 0;delay_us(4);if(cnt<100){result=1;}return result;
}void Send_ACK(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);SDA_IN();
}void SendNot_Ack(void)
{SDA_OUT();IIC_SCL = 0;delay_us(4);IIC_SDA = 1;delay_us(4);IIC_SCL = 1;delay_us(4);IIC_SCL = 0;delay_us(4);IIC_SDA = 0;delay_us(4);
}void I2C_WriteByte(uint8_t input)
{uint8_t i;SDA_OUT();for(i=0; i<8; i++){IIC_SCL = 0;delay_ms(5);if(input & 0x80){IIC_SDA = 1;}else{IIC_SDA = 0;}IIC_SCL = 1;delay_ms(5);input = (input<<1);}IIC_SCL = 0;delay_us(4);SDA_IN();delay_us(4);
} uint8_t I2C_ReadByte(void)
{uint8_t resultByte=0;uint8_t i=0, a=0;IIC_SCL = 0;SDA_IN();delay_ms(4);for(i=0; i<8; i++){IIC_SCL = 1;delay_ms(3);a=0;if(READ_SDA){a=1;}else{a=0;}resultByte = (resultByte << 1) | a;IIC_SCL = 0;delay_ms(3);}SDA_IN();delay_ms(10);return resultByte;
}void set_AHT20sendOutData(void)
{AHT20sendOutData[3] = AHT20_OutData[0];AHT20sendOutData[4] = AHT20_OutData[1];AHT20sendOutData[5] = AHT20_OutData[2];AHT20sendOutData[6] = AHT20_OutData[3];}void I2C_Start(void)
{SDA_OUT();IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);IIC_SDA = 0;delay_ms(4);IIC_SCL = 0;delay_ms(4);
}void I2C_Stop(void)
{SDA_OUT();IIC_SDA = 0;delay_ms(4);IIC_SCL = 1;delay_ms(4);IIC_SDA = 1;delay_ms(4);
}bsp_i2c.h:
#ifndef __BSP_I2C_H
#define __BSP_I2C_H#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA //IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅvoid IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endifmain.c:
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
#include "stm32f10x.h" // Device headerint main(void)
{ delay_init(); //ÑÓʱº¯Êý³õʼ»¯ uart_init(115200); //´®¿Ú³õʼ»¯Îª115200IIC_Init();while(1){printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");read_AHT20_once();delay_ms(1500);}
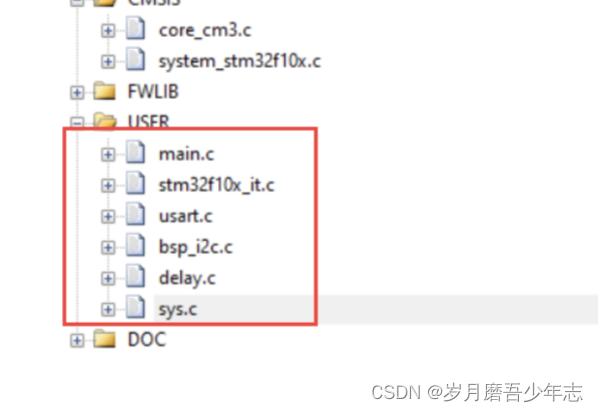
}将usart.c,bsp_i2c.c,delay.c,sys.c加到工程文件中,显示如下:
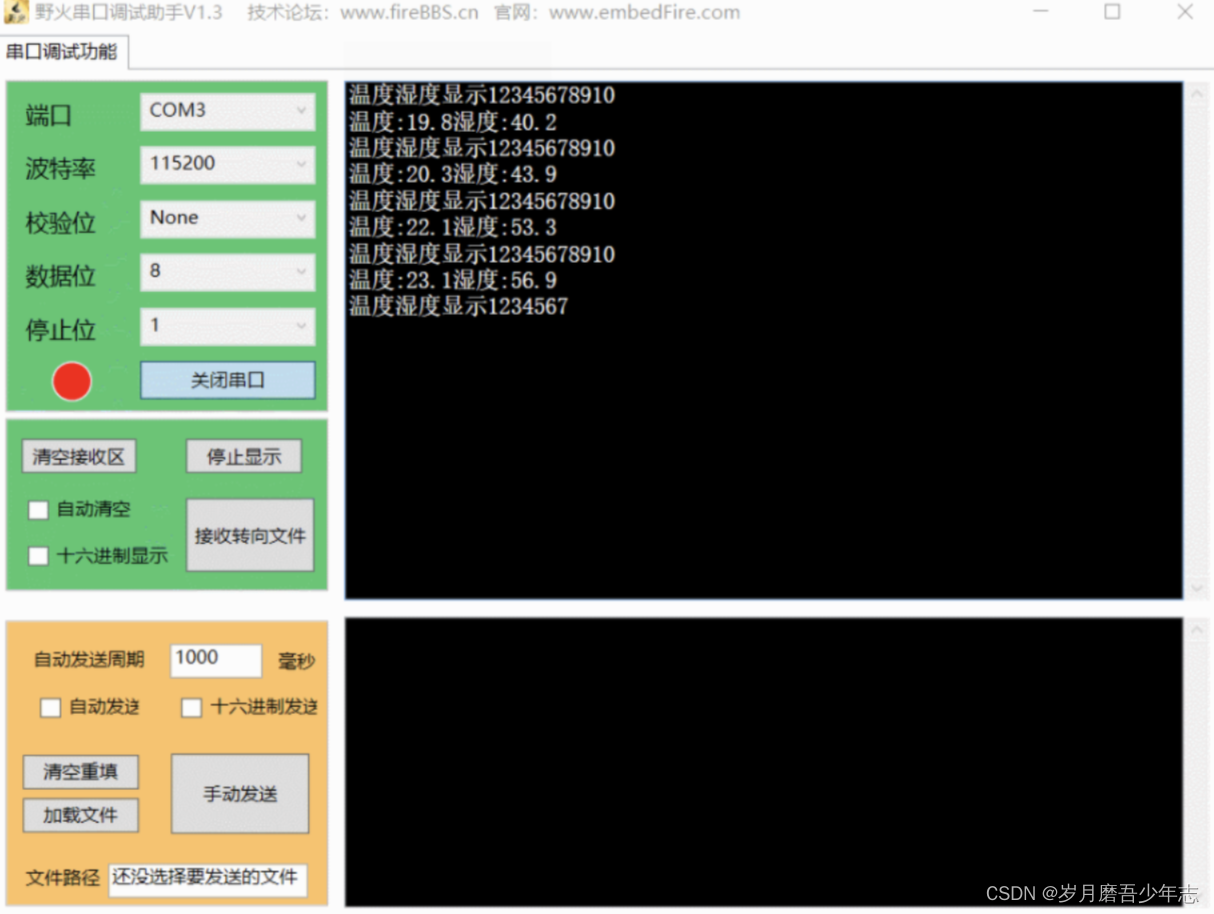
编译无误即可烧录,接受温湿度采集并显示
(三)接收结果
![C++进阶 | [4.3] 红黑树](https://img-blog.csdnimg.cn/direct/199968d1cf8d44ba8fc67be74f7a875f.png)