golang-map语雀笔记整理
- map的底层实现
- hmap
- bmap
- map是如何做到O(1)的复杂度的?
- map扩容策略
- 师兄问题回答
map的底层实现
hmap
hmap的结构体核心字段有:buckets 桶数组地址, B 定位值,桶的数目是2^B个, count 当前map的总kv对个数, 以及标记是否迁移的 oldbuckets地址,以及迁移进度指标。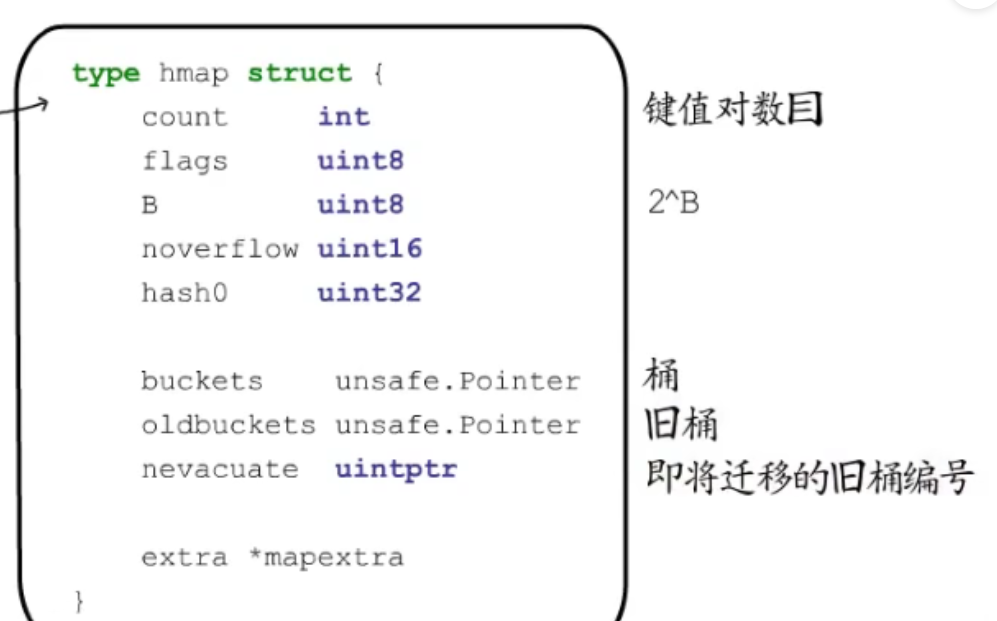
bmap
bmap核心字段是8个kv对;一个tophash数组用来查找时候比对hash值高8位;溢出桶指针指向下一个桶位置,为了保证内存对齐 ,k放在一起,v放在一起。
go的map解决hash冲突实际是结合了开放地址法和开连法。 具体来说,存的时候首先击中桶数组的某个桶,在桶内采用开放寻址法找空位,找到了就直接存,找不到就开链。 所以go的map宏观上是开链法
map的插入:
首先key经过哈希函数生成64位值,低B位用来确定桶的位置,然后在桶中寻找空位(开放寻址+开链法法),找到空位时插入kv对,更新tophash值为64位的高8位。(插入可能触发扩容机制)
map的查找:
首先key经过哈希函数生成64位值,低B位用来确定桶的位置,然后在桶中用hash值的高8位与tophash数组比对,比对成功后再比对key是否相同(因为仅仅比对高8位可能有错误,所以再比对一次key)。 如果没有找到就去溢出桶中继续找。如果当前的map处于数据迁移状态,会优先到old桶数组中去找,找到的时候会协助迁移。
map是如何做到O(1)的复杂度的?
map扩容策略
当kv对不断的增多,就会造成挂载的mbuckets线性增长,那么map的查找肯定达不到O(1),所以map是通过一个渐进式的扩容来保证每个桶内的kv对在常数级别,从而O(1)
增量式扩容: kv对/ 桶数组长度 > 6.5时发生,扩容,桶数组长度*2
等量式扩容:当map频繁的delete,造成kv对之间存在大量空洞,从而造成溢出桶数目在增加,然而桶内部8个kv对都没有用满,就需要等量扩容。 等量扩容的目的是进行迁移,从而把空洞去掉。 触发时机:溢出桶数 大于 桶数组长度时。 扩容时: 桶数组长度不变。
另外, map的扩容是渐进式扩容。 在查找或者使用的时候进行迁移。 因为一次迁移这个操作态重了,会造成性能抖动。 这也是为什么map的hmap结构体中有 oldbuckets 以及迁移进度变量。
师兄问题回答
- 为何map 无序(每次遍历map顺序不一样)
- 每次遍历的起始桶位置不一样
- map可能处于渐进式扩容状态,导致桶内kv对的位置也在变化
- 如何实现有序遍历map
- 先取出来key排序,再按照key的顺序遍历map





![C++进阶 | [4.3] 红黑树](https://img-blog.csdnimg.cn/direct/199968d1cf8d44ba8fc67be74f7a875f.png)