构建“天空地”一体化监测体系是新形势下生态、环境、水文、农业、林业、气象等资源环境领域的重大需求,无人机生态环境监测在一体化监测体系中扮演着极其重要的角色。通过无人机航空遥感技术可以实现对地表空间要素的立体观测,获取丰富多样的地理空间数据,可以为资源环境领域的科学研究与业务化工作提供重要的一手数据。近年来无人机软硬件技术飞速发展,功能愈发强大、操作愈发简单、价格愈发平民,人们开始注意到无人机在各行各业中的巨大应用潜力。很多资源环境领域的从业人员也介入到无人机应用中,通过无人机搭载不同的传感器可以灵活高效地进行地表空间要素的动态监测,获取大量宝贵的监测数据,极大地解决了很多传统野外观测手段无法解决的问题。ArcGIS作为地理信息系统领域最主流的GIS平台软件,空间数据处理和分析功能强大,十分适用于地表空间监测数据的读写、管理、分析与可视化。
无人机生态环境监测、图像处理与GIS数据分析综合实践技术应用 (qq.com)
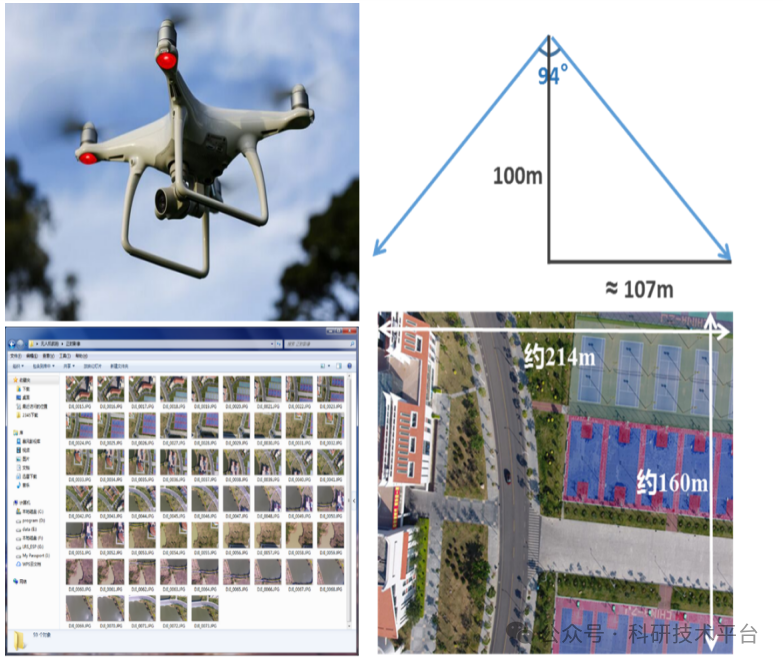
专题一、无人机航拍基本流程、航线规划与飞行实践
1.无人机行业应用概况
2.无人机遥感监测简介
3.无人机与传感器类型
4.无人机航线规划设计(谷歌地球软件的使用)
5.无人机飞行软件操作(DJI App设置实践视频)
6.无人机航拍一般过程(户外飞行实践视频)
7.无人机航拍注意事项(实际飞行经验分享)
专题二、无人机图像拼接软件的学习与操作实践
1.无人机图像拼接软件Photoscan(软件安装、破解、汉化等)
2.软件界面与功能详解(菜单栏、工具栏、工作区、模型界面等)
3.软件基本操作学习与实践(图像加载、可视化、预处理等)
4.不同图像拼接模式介绍(单体三维建模、正射影像航拍制图等)
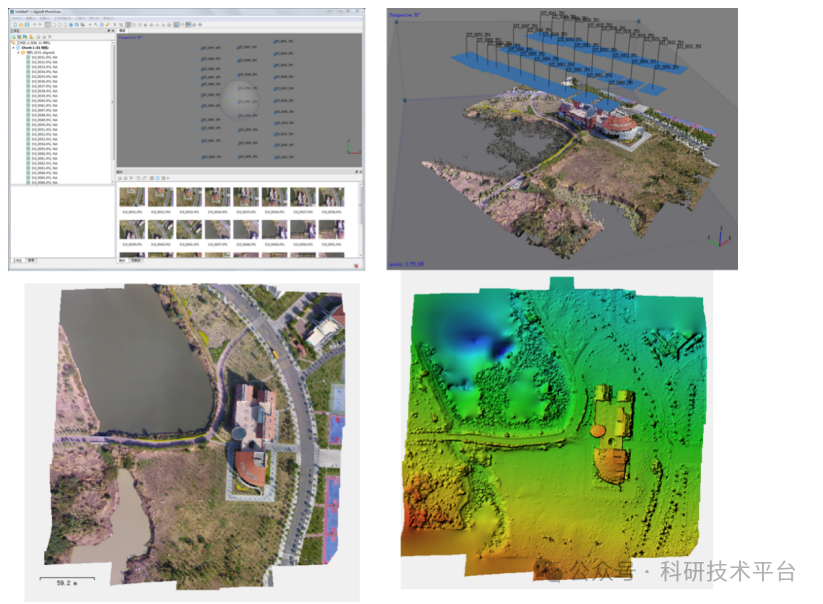
5.图像拼接处理的一般流程(图像对齐、点云生成、点云编辑、正射影像、数字高程模型等)
6.图像拼接流程批处理实现(批处理文件的编写、保存等)
1.图像分组拼接和合并(图像分组、不同堆块、对齐堆块、合并堆块等)
2.地面控制点进行图像几何校正(控制点布设规划、控制点测量、图像几何校正等)
3.图像点云分类操作与实践(自动分类、手动分类等)
4.图像拼接成果的可视化(正射影像、数字高程模型、等高线等)
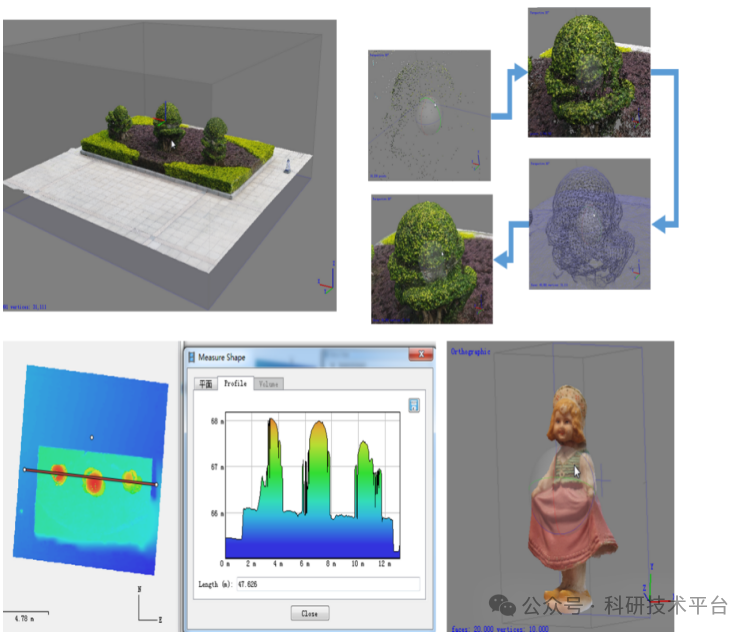
5.图像拼接成果的几何量测(点坐标、长度、面积、体积等)
6.图像拼接成果的导出(JPG格式、TIFF格式、谷歌地球格式等)
7.图像拼接流程项目报告的生成(报告解读)
专题三、无人机图像拼接典型案例详解
1.基于无人机航拍的单体三维建模案例
2.基于普通相机拍摄的单体三维建模案例
3.基于无人机航拍的正射影像制图案例
4.利用批处理实现无人机航拍制图案例
5.利用地面控制点提高制图精度案例
6.利用堆块操作实现图像分组拼接案例
7.利用点云分类操作生产数字地形模型案例
8.三维物体的点线面体几何量测案例
9.基于无人机多光谱航拍数据的正射影像制图案例
10.基于无人机多光谱数据的植被指数制图案例
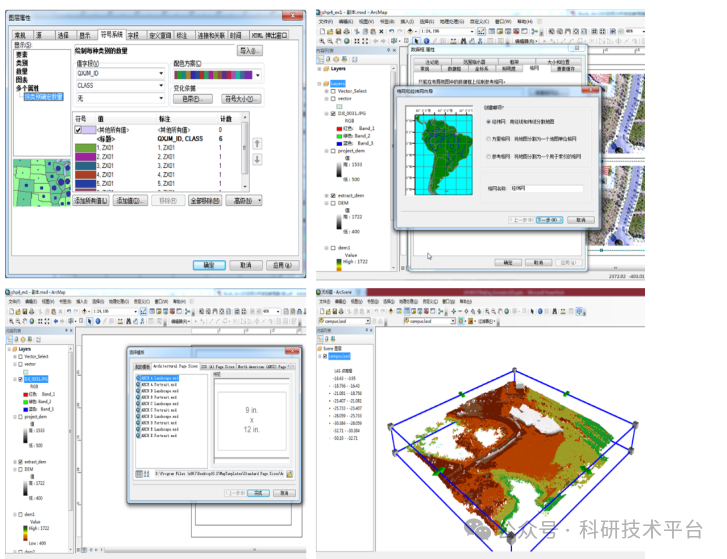
专题四、无人机图像拼接数据在GIS中的处理与分析
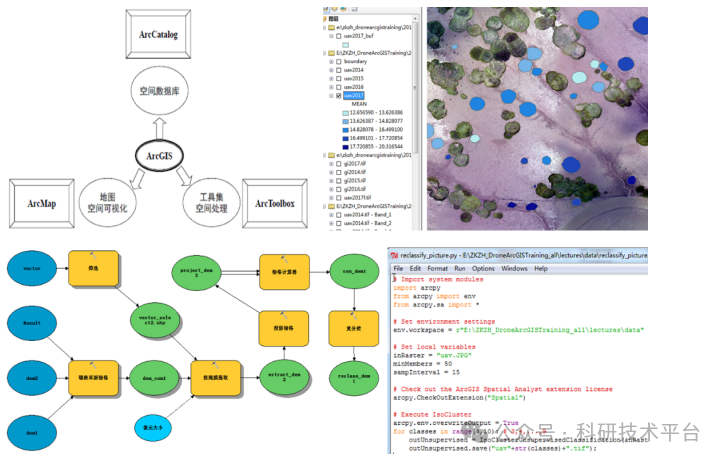
1.GIS基础与ArcGIS软件(GIS基本概念、地理坐标、投影坐标、软件架构等)(学员自带win64位笔记本电脑,安装ArcGIS10.2或以上版本软件,提前设置好上课所需软件环境)
2.ArcGIS软件基本操作与常用功能(ArcMap、ArcCatalog、常见数据格式、数据文件读写、格式转换、投影变换等)
3.ArcGIS软件空间分析(ArcToolbox、缓冲区、栅格计算器、空间插值、地物分类等)
4.ArcGIS软件高级应用(环境设置、建模工具、Python脚本编写、批量数据处理等)
5.ArcGIS读写无人机图像数据文件(格式问题、投影问题、分辨率、栅格统计等)
6.ArcGIS提取无人机图像的地物斑块(点线面矢量文件创建、栅格数据矢量化、图形与属性编辑等)
7.ArcGIS计算地物斑块的统计信息(分区统计表格、表格连接操作等)
8.ArcGIS读取无人机航拍地面控制点数据文件(GPS数据导入功能)
9.ArcGIS进行无人机图像地面控制点校正(地理配准工具)
10.ArcGIS进行无人机图像地物分类(栅格数据非监督分类)
专题五、无人机图像拼接数据在GIS中的可视化与制图
1.ArcGIS可视化(图层操作、符号化、色彩配置、透明度、掩膜显示等)
2.ArcGIS制图(地图基础、布局设计、多数据框显示等)
3.ArcGIS制图文本操作(标题、地图标注、地图注记等)
4.矢量数据的符号化设计(类别、数量、图表、多属性等)
5.栅格数据的符号化设计(分段、拉伸、栅格影像地图设置等)
6.ArcGIS地图图幅要素(坐标格网、图例、比例尺、指北针等)
7.无人机图像地物斑块可视化分析(矢量数据符号化)
8.无人机图像地物分类可视化分析(栅格数据符号化)
9.ArcGIS专题地图输出与保存(分辨率、输出范围等)
10.无人机拼接点云数据在ArcGIS中的可视化分析(ArcScene、剖面分析等)
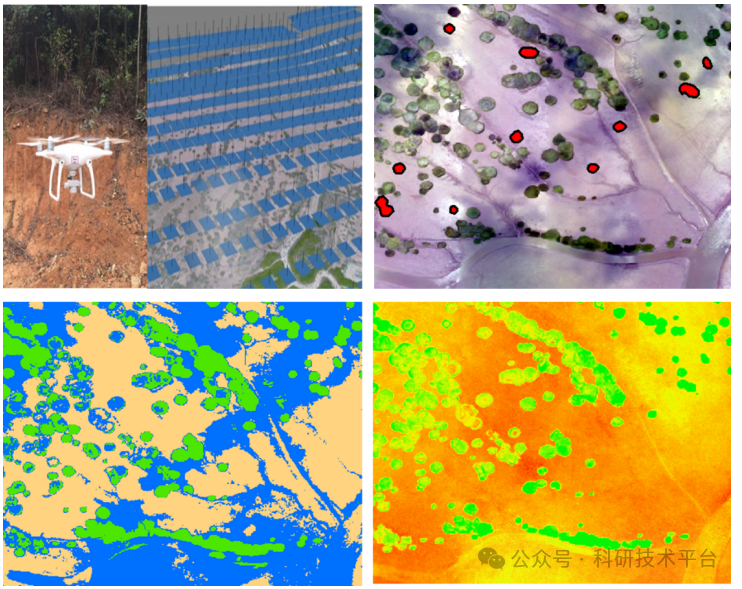
专题六、综合案例:无人机航拍植被动态的定量化研究
1.景观尺度植物斑块无人机航拍的流程
2.地面控制点的布设与RTK-GPS测量
3.利用Photoscan软件拼接无人机航拍照片
4.利用地面控制点对拼接图像进行地理配准
5.无人机航拍拼接图像的投影变换
6.计算绿度植被指数指示植被斑块的生长状况
7.利用非监督分类对拼接图像进行地物分类
8.对拼接图像中的植被斑块进行矢量化
9.植被斑块矢量数据的属性表编辑与计算
10.植被斑块矢量数据的可视化表达与专题制图
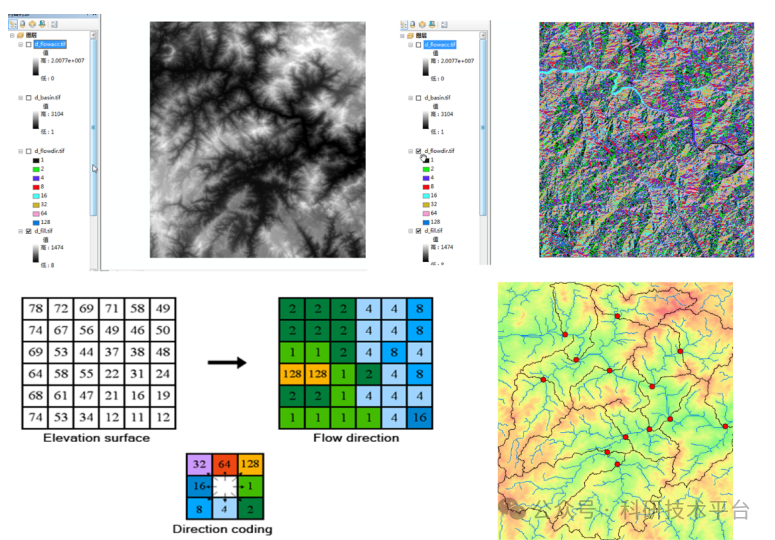
专题七、综合案例:无人机激光雷达地形测量与河网水系提取
1.无人机搭载激光雷达进行景观微地形测量
2.激光雷达点云数据衍生产品:数字表面模型DSM、数字高程模型DEM、冠层高度模型CHM
3.从DEM提取河网水系:
ü通过填洼获得无汇点DEM (工具:填洼)
ü流向计算原理(工具:流向)
ü通过流向划分盆域(工具:盆域分析)
ü累积流量计算原理(工具:流量)
ü通过累积流量提取河流栅格数据(工具:栅格计算器,阈值计算)
ü河网栅格数据转变成矢量数据(工具:栅格河网矢量化)
ü指定倾泻点(工具:捕捉倾泻点)
ü根据指定的倾泻点来确定各个分水岭(工具:分水岭)
关注科研技术平台公众号


![[22] Opencv_CUDA应用之 使用背景相减法进行对象跟踪](https://img-blog.csdnimg.cn/direct/6c04e42238c6444caf31cc0863623fbb.png)