目录
前言
一、OpenMV代码
二、STM32端接收数据
1.配置串口
2.接收数据并解析
总结
前言
通过视觉巡线小车——STM32+OpenMV(二),已基本实现了减速电机的速度闭环控制。要使小车能够自主巡线,除了能够精准的控制速度之外,还需要得到小车偏离黑线的差值——即位置偏差。本文将通过OpenMV得到该偏差。
建议参考内容:
OpenMV巡线小车 | 星瞳科技
项目实例 · OpenMV中文入门教程
系列文章请查看:视觉巡线小车——STM32+OpenMV系列文章
一、OpenMV代码
1、初始化外设,如串口等;
2、运行主要代码,拍照,图像二值化处理,线性回归处理,得到黑线与OpenMV中心线之间的像素点偏差以及偏离角度。
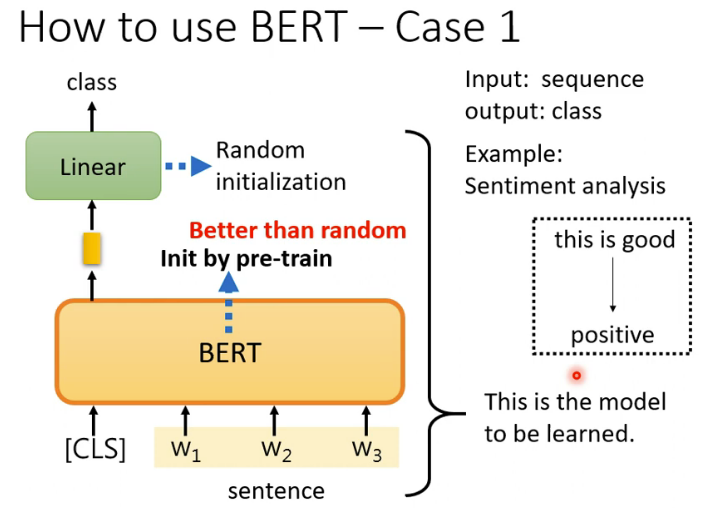
线性回归算法的原理是寻找一条最佳的直线来拟合数据点集。在视 觉巡线中,这些数据点就是二值化图像中代表线条的像素点。算法会计算这些像素点 的平均值、方差等统计量,并通过最小二乘法等来找到一条最佳的直线。
3、将得到数据打包,并发送给STM32。
THRESHOLD = (0, 23, -128, 127, -128, 127) # Grayscale threshold for dark things...
import sensor, image, time
from pyb import LED
from machine import UART
import structsensor.reset()
sensor.set_vflip(False) # 设置OpenMV图像“水平方向进行翻转”
sensor.set_hmirror(False) # 设置OpenMV图像“竖直方向进行翻转”sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQQVGA) # 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000.# 线性回归算法的运算量大,越小的分辨率识别的效果越好,运算速度越快#sensor.set_windowing([0,20,80,40])
sensor.skip_frames(time = 2000) # WARNING: If you use QQVGA it may take seconds
clock = time.clock() # to process a frame sometimes.myuart = UART(1, 115200)
# OpenMV RT 只有串口UART(1),对应P4-TX P5-RX; OpenMV4 H7 Plus, OpenMV4 H7, OpenMV3 M7 的UART(1)是P0-RX P1-TX
myuart.init(115200, bits=8, parity=None, stop=1) #8位数据位,无校验位,1位停止位def send_data_packet(x, y):temp = struct.pack(">bbii", #格式为小端模式俩个字符俩个整型0xAA, #帧头10xBB, #帧头2int(x), # up sample by 4 #数据1int(y)) # up sample by 4 #数据2myuart.write(temp)#串口发送
while(True):clock.tick()img = sensor.snapshot().binary([THRESHOLD])''' 截取一张图片,进行 “阈值分割”阈值分割函数image.binary()对图像进行二值化(binary:二元的;由两部分组成的)得到的效果是:将阈值颜色变成白色,非阈值颜色变成黑色'''line = img.get_regression([(100,100)], robust = True)#调用线性回归函数# 对所有的阈值像素进行线性回归# 线性回归的效果就是将我们视野中“二值化”分割后的图像回归成一条直线if (line):rho_err = abs(line.rho())-img.width()/2# 计算我们的直线相对于中央位置偏移的距离(偏移的像素)# abs()函数:返回数字的绝对值 line.rho():返回霍夫变换后的直线p值。if line.theta()>90:theta_err = line.theta()-180else:theta_err = line.theta()# 进行坐标的变换:y轴方向为0°,x轴正方向为90°,x轴负方向为-90°img.draw_line(line.line(), color = 127)print(rho_err,line.magnitude(),theta_err)#line.magnitude()返回一个表示“线性回归效果”的值,这个值越大,线性回归效果越好;# 如果越接近于0,说明我们的线性回归效果越接近于一个圆,效果越差if line.magnitude()>8:send_data_packet(rho_err,theta_err)LED(1).off()else:LED(1).on()LED(2).off()else:LED(2).on()pass#print(clock.fps())
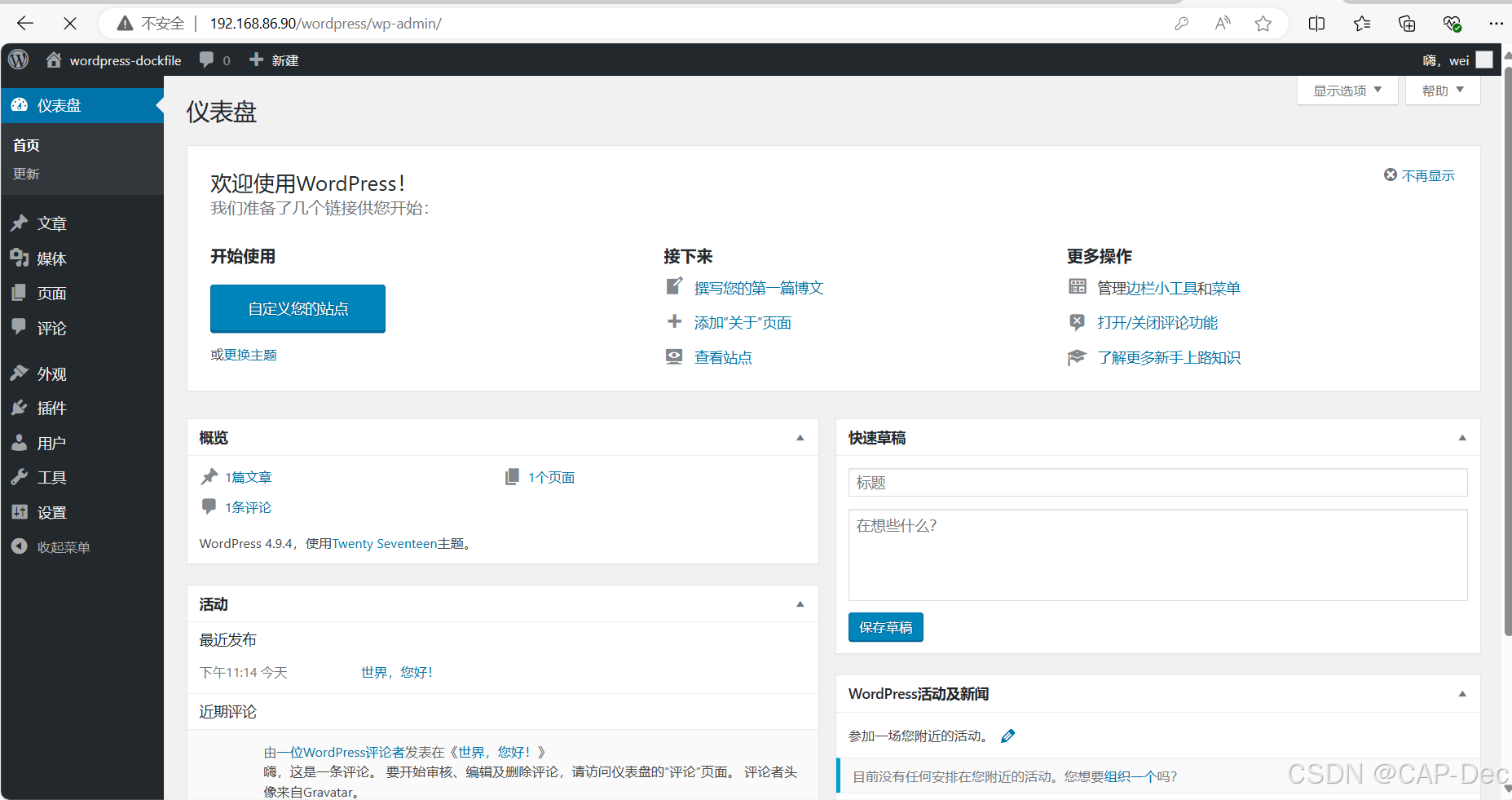
处理前后结果对比:

二、STM32端接收数据
1.配置串口
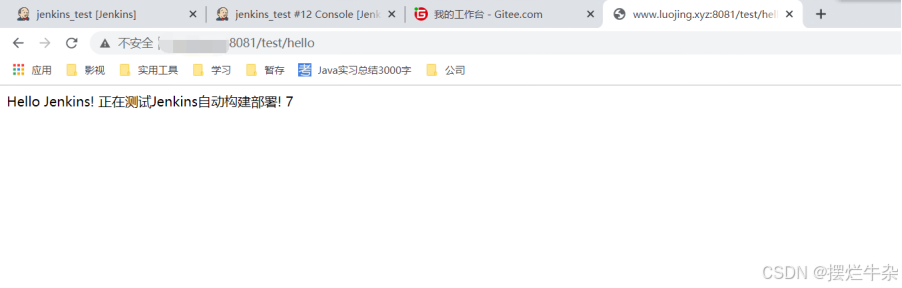
由于OpenMV与STM32之间采用串口通讯,所以同样需要在CubeMX进行配置:

同理也需要开启中断,这里不再赘述,参考上一篇文章。
2.接收数据并解析
需要加入以下代码,进行初始化:
//全局变量
unsigned char OpenMV_Buf;
int theta_org,rho_org;//初始化处加入
HAL_UART_Receive_IT(&huart2,&OpenMV_Buf,1);在串口2中断回调函数中处理如下:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART2 ){
// printf("OK\n");Rec_proce(OpenMV_Buf); HAL_UART_Receive_IT(&huart2,&OpenMV_Buf,1); }
}
void Rec_proce(u8 data)
{/* 局部静态变量:接收缓存 */static u8 RxBuffer[10];/* 数据长度 *//* 数据数组下标 */static u8 data_cnt = 0;/* 接收状态 */static u8 state = 0;/* 帧头1 */if(state==0&&data==0xAA){state=1;}/* 帧头2 */else if(state==1&&data==0xBB){state=2;data_cnt = 0;}/* 接收数据租 */else if(state==2){RxBuffer[data_cnt++]=data;if(data_cnt>=8){state = 0; rho_org = (int)((RxBuffer[0]<<24) | (RxBuffer[1]<<16) | (RxBuffer[2]<<8) | (RxBuffer[3])); theta_org = (int)((RxBuffer[4]<<24) | (RxBuffer[5]<<16) | (RxBuffer[6]<<8) | (RxBuffer[7])); printf("%d,%d\n",rho_org,theta_org);
// for(int i=0;i<8;i++) printf("%d",RxBuffer[i]);
// printf("\n\n\n\n");}}/* 若有错误重新等待接收帧头 */elsestate = 0;
}如果要使用printf进行打印输出,则需要加入以下代码,这里以串口3为例,如下:
#include <stdio.h>
int fputc(int ch,FILE *f)
{while((USART3->SR & 0x40) == 0);USART3->DR = (uint8_t)ch;return ch;
}总结
通过本文,使用OpenMV得到中心线偏离黑线的像素点偏差和角度偏差,再将数据打包通过串口发送给STM32,最后在STM32上将数据解析出来,以便后续控制运用。