所学内容来自百问网
目录
1. 文件在内核中的表示
2. 打开字符设备节点时,内核中也有对应的struct file
3. 编写驱动程序步骤
4. 相关知识点
4.1 涉及函数解析
4.2 module_init/module_exit的实现
4.3 register_chrdev的内部实现
4.4 class_destroy/device_create 浅析
5. 示例代码
5.1 驱动代码
5.2 应用代码
5.3 Makefile
5.4 效果
1. 文件在内核中的表示
APP 打开文件时,可以得到一个整数,这个整数被称为文件句柄。对于APP 的每一个文件句柄,在内核里面都有一个“struct file”与之对应。

使用open打开文件时,传入的flags、mode等参数会被记录在内核中对应的struct file结构体里(f_flags、f_mode):
int open(const char *pathname, int flags, mode_t mode); 去读写文件时,文件的当前偏移地址也会保存在 struct file 结构体的 f_pos 成员里。
2. 打开字符设备节点时,内核中也有对应的struct file
注意这个结构体中的结构体:struct file_operations *f_op,这是由驱 动程序提供的。


结构体struct file_operations的定义如下:

3. 编写驱动程序步骤
1.确定主设备号,也可以让内核分配
2.定义自己的file_operations结构体
3.实现对应的drv_open/drv_read/drv_write 等函数,填入file_operations结构体
4.把file_operations 结构体告诉内核:register_chrdev
5.得有一个入口函数:安装驱动程序时,就会去调用这个入口函数
6.有入口函数就应该有出口函数:卸载驱动程序时,出口函数调用 unregister_chrdev
7.其他完善:提供设备信息,自动创建设备节点:class_create, device_create
4. 相关知识点
4.1 涉及函数解析
-
将数据从内核空间复制到用户空间
-
unsigned long copy_to_user(void __user *to, const void *from, unsigned long n);
-
void __user *to:指向用户空间的指针,表示数据复制的目标地址
-
const void *from:指向内核空间的指针,表示数据复制的源地址
-
unsigned long n:要复制的字节数
-
返回值:函数返回未能复制的字节数。如果返回值为0,则表示全部复制成功
-
-
将数据从用户空间复制到内核空间
-
unsigned long copy_from_user(void *to, const void __user *from, unsigned long n);
-
void *to:指向内核空间的指针,表示数据复制的目标地址
-
const void __user *from:指向用户空间的指针,表示数据复制的源地址
-
unsigned long n:要复制的字节数
-
返回值:函数返回未能复制的字节数。如果返回值为0,则表示全部复制成功
-
-
从文件中读取数据到用户空间缓冲区
-
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
-
struct file *:指向
file结构体的指针,代表要读取的文件 -
char __user *:指向用户空间缓冲区的指针,用于存储从文件中读取的数据
-
size_t:要读取的字节数
-
loff_t *:指向文件中的偏移量的指针,表示从文件的哪个位置开始读取
-
返回值:返回实际读取的字节数。如果读取失败,返回负值
-
-
将用户空间缓冲区的数据写入文件
-
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
-
struct file *:指向
file结构体的指针,代表要写入的文件 -
const char __user *:指向用户空间缓冲区的指针,包含要写入文件的数据
-
size_t:要写入的字节数
-
loff_t *:指向文件中的偏移量的指针,表示从文件的哪个位置开始写入
-
返回值:返回实际写入的字节数。如果写入失败,返回负值
-
-
打开文件,并初始化
file结构体-
int (*open) (struct inode *, struct file *);
-
struct inode *:指向
inode结构体的指针,代表要打开的文件的元数据 -
struct file *:指向
file结构体的指针,用于存储打开文件的相关信息 -
返回值:如果打开成功,返回0;如果失败,返回负值
-
-
释放文件资源,包括关闭文件、释放内存等
-
int (*release) (struct inode *, struct file *);
-
struct inode *:指向
inode结构体的指针,代表要释放的文件的元数据 -
struct file *:指向
file结构体的指针,包含要释放的文件的相关信息 -
返回值:如果释放成功,返回0;如果失败,返回负值
-
4.2 module_init/module_exit的实现
一个驱动程序有入口函数、出口函数,代码如下:
module_init(hello_init);
module_exit(hello_exit); 驱动程序可以被编进内核里,也可以被编译为ko文件后手工加载。对于这 两种形式,“module_init/module_exit”这2个宏是不一样的。在内核文件 “include\linux\module.h”中可以看到这2个宏:

module_init(initfn) 宏用于声明模块初始化函数。当模块被加载到内核时,initfn函数会被自动调用。这个函数通常用于执行模块所需的任何初始化任务,比如注册设备、分配内存、初始化数据结构等。
module_exit(exitfn)宏用于声明模块退出函数。当模块从内核中卸载时,exitfn函数会被自动调用。这个函数通常用于执行模块卸载前的任何清理任务,比如注销设备、释放内存、清理数据结构等。
4.3 register_chrdev的内部实现
register_chrdev函数源码如下:
static inline int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)
{ return __register_chrdev(major, 0, 256, name, fops);
} 它调用__register_chrdev函数,这个函数的代码精简如下:
01 int __register_chrdev(unsigned int major, unsigned int baseminor,
02 unsigned int count, const char *name,
03 const struct file_operations *fops)
04 {
05 struct char_device_struct *cd;
06 struct cdev *cdev;
07 int err = -ENOMEM;
08
09 cd = __register_chrdev_region(major, baseminor, count, name);
10
11 cdev = cdev_alloc();
12
13 cdev->owner = fops->owner;
14 cdev->ops = fops;
15 kobject_set_name(&cdev->kobj, "%s", name);
16
17 err = cdev_add(cdev, MKDEV(cd->major, baseminor), count);
18 } 这个函数主要的代码是第09行、第11~15行、第17行。
第09行,调用__register_chrdev_region函数来“注册字符设备的区域”, 它仅仅是查看设备号(major, baseminor)到(major, baseminor+count-1) 有没有被占用,如果未被占用的话,就使用这块区域。
内核中存在着一个chrdevs数组:
static struct char_device_struct { struct char_device_struct *next; unsigned int major; unsigned int baseminor; int minorct; char name[64]; struct cdev *cdev; /* will die */
} *chrdevs[CHRDEV_MAJOR_HASH_SIZE]; 去访问它的时候,并不是直接使用主设备号major来确定数组项,而是使用如下函数来确定数组项:
/* index in the above */
static inline int major_to_index(unsigned major)
{ return major % CHRDEV_MAJOR_HASH_SIZE;
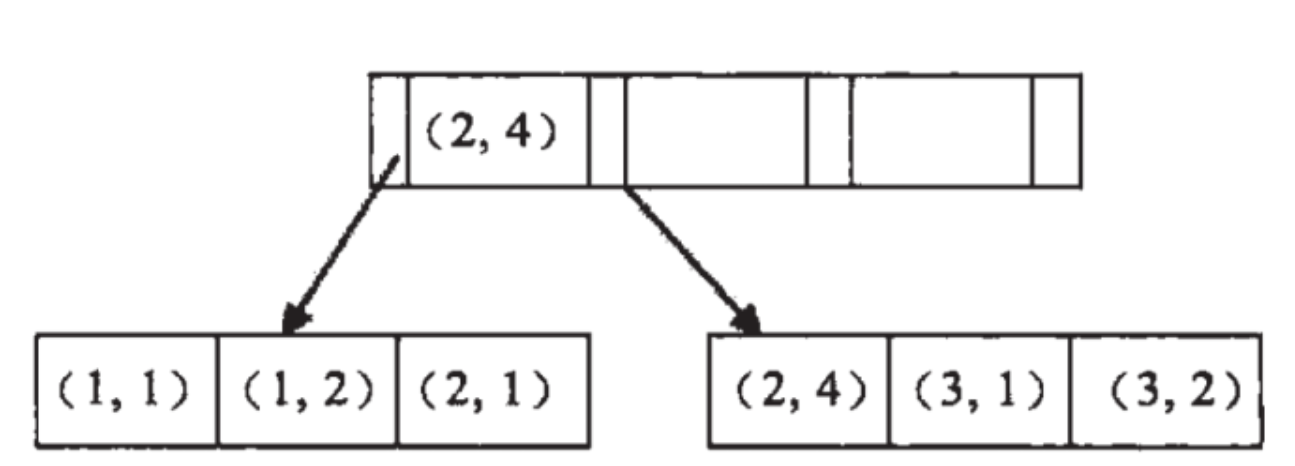
} 上述代码中,CHRDEV_MAJOR_HASH_SIZE等于255。比如主设备号1、256, 都会使用chardevs[1]。chardevs[1]是一个链表,链表里有多个 char_device_struct结构体,某个结构体表示主设备号为1的设备,某个结构 体表示主设备号为256的设备。
chardevs的结构图如图1.6所示:

由此可见:
1.chrdevs[i]数组项是一个链表头
链表里每一个元素都是一个char_device_struct结构体,每个元素表示 一个驱动程序。
char_device_struct结构体内容如下:
struct char_device_struct { struct char_device_struct *next; unsigned int major; unsigned int baseminor; int minorct; char name[64]; struct cdev *cdev; /* will die */
} 它指定了主设备号major、次设备号baseminor、个数minorct,在cdev 中含有file_operations结构体。
char_device_struct结构体的含义是:主次设备号为(major, baseminor)、(major, baseminor+1)、(major, baseminor+2)、(major, baseminor+ minorct-1)的这些设备,都使用同一个file_operations来操作。
2.在图1.6中,chardevs[1]中有3个驱动程序
第1个char_device_struct结构体对应主次设备号(1, 0)、(1, 1),这 是第1个驱动程序。
第2个char_device_struct结构体对应主次设备号(1, 2)、(1, 2)、……、 (1, 11),这是第2个驱动程序。
第3个char_device_struct结构体对应主次设备号(256, 0),这是第3 个驱动程序。
第11~15行分配一个cdev结构体,并设置它:它含有file_operations 结构体。
第17行调用cdev_add把cdev结构体注册进内核里,cdev_add函数代码 如下:
01 int cdev_add(struct cdev *p, dev_t dev, unsigned count)
02 {
03 int error;
04
05 p->dev = dev;
06 p->count = count;
07
08 error = kobj_map(cdev_map, dev, count, NULL,
09 exact_match, exact_lock, p);
10 if (error)
11 return error;
12
13 kobject_get(p->kobj.parent);
14
15 return 0;
16 } 这个函数涉及kobj的操作,这是一个通用的链表操作函数。它的作用是: 把cdev结构体放入cdev_map链表中,对应的索引值是“dev”到“dev+count 1”。以后可以从cdev_map链表中快速地使用索引值取出对应的cdev。
比如执行以下代码:
err = cdev_add(cdev, MKDEV(1, 2), 10);其中的MKDEV(1,2)构造出一个整数“1<<8 | 2”,即0x102;上述代码将 cdev放入cdev_map链表中,对应的索引值是0x102到0x10c(即0x102+10)。 以后根据这10个数值(0x102、0x103、0x104、……、0x10c)中任意一个,都 可以快速地从cdev_map链表中取出cdev结构体。
APP打开某个字符设备节点时,进入内核。在内核里根据字符设备节点的主、 次设备号,计算出一个数值(major<<8 | minor,即inode->i_rdev),然后使 用这个数值从cdev_map中快速得到cdev,再从cdev中得到file_operations 结构体。
关键函数如下:

在打开文件的过程中,可以看到并未涉及chrdevs,都是使用cdev_map。 所以可以看到在chrdevs的定义中看到如下注释:

4.4 class_destroy/device_create 浅析
驱动程序的核心是 file_operations 结构体:分配、设置、注册它。 “class_destroy/device_create”函数知识起一些辅助作用:在/sys目录下 创建一些目录、文件,这样Linux系统中的APP(比如udev、mdev)就可以根据 这些目录或文件来创建设备节点。
以下代码将会在“/sys/class”目录下创建一个子目录“hello_class”
hello_class = class_create(THIS_MODULE, "hello_class"); 以下代码将会在“/sys/class/hello_class”目录下创建一个文件 “hello”:
device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"); 
5. 示例代码
5.1 驱动代码
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
//1.确定主设备号,也可以让内核分配
static int major = 0;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a,b) (a < b ? a : b)
//3.实现对应的drv_open/drv_read/drv_write 等函数,填入file_operations结构体
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{int ret;printk("%s %s line %d\n",__FILE__,__FUNCTION__,__LINE__);ret = copy_to_user(buf, kernel_buf, MIN(1024,size));return MIN(1024,size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{int ret;printk("%s %s line %d\n",__FILE__,__FUNCTION__,__LINE__);ret = copy_from_user(kernel_buf, buf, MIN(1024,size));return MIN(1024,size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{printk("%s %s line %d\n",__FILE__,__FUNCTION__,__LINE__);return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{printk("%s %s line %d\n",__FILE__,__FUNCTION__,__LINE__);return 0;
}
//2.定义自己的file_operations结构体
static struct file_operations hello_drv = {.owner = THIS_MODULE,.open = hello_drv_open,.read = hello_drv_read,.write = hello_drv_write,.release = hello_drv_close,
};
//4.把file_operations 结构体告诉内核:register_chrdev
//5.得有一个入口函数:安装驱动程序时,就会去调用这个入口函数
static int __init hello_init(void)
{int err;major = register_chrdev(0,"hello",&hello_drv);
hello_class = class_create(THIS_MODULE, "hello_class");err = PTR_ERR(hello_class);if(IS_ERR(hello_class)){unregister_chrdev(major,"hello");return -1;}
device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello");return 0;
}
//6.有入口函数就应该有出口函数:卸载驱动程序时,出口函数调用 unregister_chrdev
static void __exit hello_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(hello_class, MKDEV(major, 0));class_destroy(hello_class);unregister_chrdev(major, "hello");
}
//7.其他完善:提供设备信息,自动创建设备节点:class_create, device_create
module_init(hello_init);
module_exit(hello_exit);
// 声明许可证类型
MODULE_LICENSE("GPL");5.2 应用代码
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
/*./hello_drv_test -w abc./hello_drv_test -r
*/
int main(int argc,char **argv)
{int fd;char buf[1024];int len;
// 判断参数if(argc < 2){printf("Usage: %s -w <string>\n",argv[0]);printf(" %s -r\n",argv[0]);return -1;}
// 打开文件fd = open("/dev/hello",O_RDWR);if(fd == -1){printf("can not open file /dev/hello\n");return -1;}
// 写文件或读文件if((strcmp(argv[1],"-w") == 0) && (argc == 3)){len = strlen(argv[2]) + 1;len = len < 1024 ? len : 1024;write(fd,argv[2],len);}else{len = read(fd,buf,1024);buf[1023] = '\0';printf("APP read : %s\n",buf);}
close(fd);return 0;
}5.3 Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
// 此处使用的是IMX6U_6ULL开发板
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88
all:make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o hello_drv_test hello_drv_test.c
clean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.orderrm -f hello_drv_test
obj-m += hello_drv.o5.4 效果
linux:

开发板:
装载驱动
![]()
查看驱动是否转载成功

执行程序






![[第五空间 2021]WebFTP](https://i-blog.csdnimg.cn/direct/7ca65d63880340998d00f6091bfc930a.png)




![[论文泛读]zkLLM: Zero Knowledge Proofs for Large Language models](https://i-blog.csdnimg.cn/direct/dc35722b39844f709bb19c468807f1be.png)







